

Теплоэнергетика, 2022, № 10, стр. 45-63
Регулирование температуры свежего пара с использованием динамического нечеткого матричного регулятора с универсумом переменных
Lian Lian *
College of Information Engineering, Shenyang University of Chemical Technology, 11th Street, Shenyang Economic
and Technological Development Zone
110142 Liaoning Province, Shenyang City, Tiexi District, China
* E-mail: lianlian_syuct@163.com
Поступила в редакцию 22.08.2021
После доработки 28.09.2021
Принята к публикации 29.10.2021
- EDN: CTKQUO
- DOI: 10.56304/S0040363622100046
Аннотация
Температура свежего пара является одним из важнейших параметров, требующих мониторинга в режиме реального времени, что напрямую связано с эффективностью выработки электроэнергии и безопасностью эксплуатации котла. Для преодоления высокой инерционности и длительного времени задержки сигнала системы регулирования температуры свежего пара на базе контроллера нечеткого динамического матричного управления (fuzzy dynamic matrix control ‒ Fuzzy-DMC) разработан регулятор, в котором реализована идея введения универсума переменных (variable universe fuzzy dynamic matrix control ‒ VU Fuzzy-DMC). Для улучшения адаптивной способности и точности управления нечетким контроллером универсум переменных может быть сжат или расширен. Проведено моделирование системы регулирования температуры свежего пара с использованием PID- (proportional-integral-derivative), DMC-, Fuzzy-DMC- и VU Fuzzy-DMC-регуляторов в следующих направлениях: отслеживание фиксированных значений для согласованной модели2; робастная верификация при несогласованной модели; защита от внешних возмущений; проверка устойчивости к изменению нагрузки. Результаты моделирования показывают, что как при согласованной, так и при несогласованной модели VU Fuzzy-DMC-регулятор обладает лучшими характеристиками управления по сравнению с PID-, DMC-, Fuzzy-DMC-регуляторами. VU Fuzzy-DMC обеспечивает незначительное отклонение температуры свежего пара от заданного значения и минимальное время регулирования, а сама система с VU Fuzzy-DMC обладает высокими надежностью и помехозащищенностью.
Температура22 свежего пара на выходе из котла является одним из основных параметров, подлежащих непрерывному мониторингу в процессе выработки электроэнергии на современной тепловой электростанции, поскольку именно этот параметр оказывает существенное влияние на стабильность и эффективность функционирования ТЭС. С развитием электроэнергетики мощность котла современной электростанции постоянно увеличивается и регулировать его основные параметры становится все сложнее и сложнее. Поддержание температуры свежего пара в требуемом диапазоне ‒ одна из наиболее актуальных проблем, которую необходимо решить. Слишком высокая температура и большой расход свежего пара будут приводить к чрезмерной нагрузке на лопатки паровой турбины, вызывая их тепловое расширение и деформацию. Если расширение каким-то образом заблокировать, то это повлечет вибрацию генераторной установки, что, в свою очередь, может привести к непоправимым последствиям. Если температура свежего пара слишком низкая, то это не только снижает эффективность выработки электроэнергии и приводит к потере ресурсов, но и повышает влажность пара на поверхности лопаток паровой турбины, усугубляя степень их коррозии и способствуя существенному сокращению срока службы. Поэтому разработка соответствующей системы регулирования температуры свежего пара является важной и актуальной задачей.
СОВРЕМЕННОЕ СОСТОЯНИЕ ВОПРОСА
В настоящее время для контроля температуры свежего пара широко используется каскадная система PID-регулирования с ведущим дифференциальным сигналом (leading differential ‒ LD). Разработанные в [1] модифицированные регуляторы питательной воды позволили удерживать изменение температуры свежего пара в пределах 2°C. Такое регулирование было достигнуто на угольных электростанциях сверхкритических параметров пара при типичном изменении нагрузки. В [2] описывается применение контроллера с одним входом и одним выходом (single-input single-output ‒ SISO) и контроллера положения клапана (valve position controller ‒ VPC) с использованием надежных PI-регуляторов, разработанных на основе спецификаций количественной теории обратной связи для управления температурой пара на выходе пароперегревателя прямоточного котла мощностью 600 МВт. Результаты показывают, что применение VPC более эффективно, чем SISO.
Следует отметить, что на температуру свежего пара влияет множество факторов. Использование обычного контроллера зачастую неэффективно. С постоянным усложнением производственного процесса становится все труднее удовлетворять требования промышленного контроля. Поэтому в последние годы для преодоления таких недостатков системы регулирования температуры пара, как большое запаздывание сигнала и сложность получения математической модели, эксперты и ученые внедрили интеллектуальное управление в основную систему регулирования температуры пара. Для достижения точного и быстрого регулирования они объединили интеллектуальное управление с традиционным каскадным управлением.
Нечеткое управление. В [3] предложен нечеткий PID-регулятор (Fuzzy-PID) на базе универсума переменных для системы контроля температуры свежего пара. Результаты моделирования показывают, что такой нечеткий PID-регулятор обладает более высокой скоростью отклика, меньшими выбросами сигнала и ошибкой, лучшим качеством отслеживания сигнала по сравнению с другими регуляторами (такими как традиционный PID-регулятор, обобщенный PID-регулятор, регулятор с нечеткой нейронной сетью и прогнозирующий регулятор Смита). Кроме того, он снижает эффект запаздывания системы управления.
Авторы [4] разработали нечеткий PID-регулятор на основе алгоритма прогнозирования временных рядов. Результаты моделирования и эксперимента продемонстрировали значительное повышение эффективности регулирования. Этот регулятор явно превосходит по своим характеристикам традиционный и нечеткий PID-регуляторы.
В [5] исследованы контроллеры нечеткой логики интервального типа 2 применительно к регулированию температуры пара. Для моделирования авторы использовали модуль управления, созданный с помощью MATLAB. Результаты моделирования показали, что разработанная система нечеткого управления может обеспечить удовлетворительную производительность регулирования.
В [6] задача регулирования температуры свежего пара эффективно решается с помощью нечеткой сети k-средних, которая содержит локальные модели и нечеткие правила. Результаты моделирования позволили сделать вывод, что предложенный алгоритм может обеспечить довольно хорошую производительность, высокую скорость сходимости решения и точность идентификации, что способствует последующему эффективному управлению процессом горения в котле.
Авторы [7] разработали и настроили регулятор нечеткой логики для управления температурой пара в котле. Согласно полученным результатам, этот регулятор превосходит традиционные.
В [8] повышение качества нечеткого управления основано на оптимизации параметров нечеткого регулятора, используемого для управления температурой свежего пара. Предлагаемая в [8] методика управления проверена имитационными экспериментами при изменении режима работы, отклика на возмущение и изменении динамики системы.
Нейронная сеть. Для снижения инерционности и времени задержки системы регулирования температуры свежего пара целесообразно применять метод управления нечеткой нейронной сетью, оптимизированной генетическим алгоритмом обратного распространения [genetic algorithm-back propagation ‒ GA-BP]. Алгоритм оптимизации GA-BP преодолевает недостатки алгоритма GA или алгоритма BP, которые обычно используются для настройки параметров контроллера нечеткой нейронной сети. Результаты моделирования [9] показали, что GA-BP-алгоритм, по сравнению с каскадным PID-алгоритмом и нечеткой нейронной сетью, обладает более высокой скоростью отклика, меньшими выбросами сигнала и ошибкой, лучшим качеством отслеживания и уменьшает эффект запаздывания системы управления при различных нагрузках котла.
В [10] авторы предлагают каскадную схему PID-регулирования на основе нейронной сети BP. В этой статье оптимизируется начальный весовой коэффициент нейронной сети с помощью алгоритма оптимизации роя частиц. Затем определяется наилучшее сочетание параметров PID-регулятора путем обучения системы и настройки весового коэффициента. Пример моделирования подтверждает, что предлагаемый метод обладает лучшим качеством управления и высокой противоаварийной способностью по сравнению с исходной нейронной сетью.
Авторы [11] предствляют интеллектуальную систему каскадного PID-регулирования с нейронной сетью BP (BPNN), основанную на алгоритме улучшенной оптимизации роя частиц (particle swarm optimization ‒ PSO). Результат моделирования показывает, что качество управления и надежность системы значительно улучшены по сравнению с обычной системой каскадного PID-регулирования температуры свежего пара.
Входными параметрами нейронной сети, разработанной в [12], являются мощность генератора, расход свежего пара на выходе из вторичного пароперегревателя, а выходными параметрами ‒ степень открытия клапана. Разработанная нейронная сеть может поддерживать температуру свежего пара в диапазоне ±2°C от заданного значения.
В [13] предлагается новый адаптивный IMC-PID-регулятор (integral model control-proportional-integral-derivative) на основе нейронной сети. Для идентификации модели объекта и настройки параметров IMC-PID-регулятора используются две нейронные сети. Результаты моделирования свидетельствуют об эффективности предлагаемой методики.
Прогнозирующий контроль. В последние годы широко используется метод регулирования температуры свежего пара, основанный на прогнозирующем контроле. Авторы [14] разработали автономную надежную модель без смещения для прогнозирования температуры свежего пара на угольной ТЭС. Моделирование управления этим параметром на электростанции со сверхкритическими параметрами пара мощностью 1000 МВт с использованием локальных эксплуатационных данных показывает, что предлагаемый подход может обеспечить удовлетворительное качество управления и точность онлайн-вычислений даже в сложных условиях работы ТЭС.
В исследовании [15] предложен метод многомерного ограниченного прогнозирующего управления MCPC (multivariable constrained predictive control) для регулирования температуры перегретого пара угольного энергоблока на ультрасверхкритические параметры. При использовании этого метода температуру свежего пара можно поддерживать в пределах заданного интервала при изменении нагрузки ТЭС. Метод MCPC обеспечивает более стабильную температуру свежего пара, чем обычный PID-регулятор.
Для повышения эффективности регулирования температуры свежего пара в [16] разработан обобщенный прогностический PID-метод, основанный на улучшенном алгоритме PSO ‒ оптимизации роя частиц. Результаты имитационного эксперимента показывают, что этот метод обладает более высокой скоростью отклика, меньшими выбросами и ошибкой управления, лучшим качеством отслеживания и небольшим запаздыванием системы регулирования по сравнению с нечетким PID-регулятором и нечеткой нейронной сетью.
Авторы [17] предлагают подход, сочетающий в себе оценку движущегося горизонта с модельным прогнозирующим управлением, формулируют минимальную/максимальную оптимизацию (оптимальную последовательность) регулирования температуры свежего пара. Результаты моделирования подтверждают, что представленный подход может обеспечить более существенную защиту от помех по сравнению с обычной стратегией DMC-PID.
Авторы [18] разработали кусочно-линейную модель на основе метода ошибки прогноза. Для ее валидации использовался большой объем экспериментальных данных, полученных на парогенераторе-утилизаторе при его пуске из холодного состояния. Результаты моделирования сравниваются с фактическими данными завода-изготовителя, свидетельствующими об эффективности и производительности предлагаемой методики управления.
Авторы [19] объединили динамическое матричное (dynamic matrix control ‒ DMC) и нечеткое (fuzzy logic control ‒ FLC) управление для контроля температуры пара на тепловой электростанции мощностью 300 МВт. Результаты моделирования показали, что регулятор FLC имеет лучшую производительность, чем регулятор на основе усовершенствованной модели, такой как DMC, или обычный PID-регулятор. Регуляторы FLC позволяют получать хорошие результаты при регулировании сложных нелинейных процессов с быстрым изменением характеристик или с большими временами задержки.
В [20] предлагается алгоритм прогнозирования температуры пара, разработанный на основе расширенного фильтра Калмана (extended Kalman filter ‒ EKF) для прогнозирования температуры пара на тепловой электростанции мощностью 210 МВт. Этот алгоритм сравнивается с каскадной PID-системой, используемой при обычном регулировании температуры пара. Результаты моделирования позволяют судить об эффективности предложенного алгоритма.
Авторы [21] предлагают адаптивное прогнозирующее экспертное решение (adaptive predictive expert ‒ ADEX) для управления процессом охлаждения при регулировании температуры свежего пара на угольной электростанции. Регулирование с использованием модуля ADEX продемонстрировало 50%-ное снижение колебаний температуры пара по сравнению с обычным PID-регулированием.
Стратегия управления, основанная на алгоритме оптимизации. В [22] предложена стратегия каскадного управления с использованием метода активного подавления возмущений (active disturbance rejection control – ADRC) для системы регулирования температуры свежего пара. Параметры этой системы оптимизированы с помощью адаптивного алгоритма оптимизации роя хаотических частиц (adaptive chaotic particle swarm optimization – ACPSO). Результаты моделирования свидетельствуют о том, что оптимальный метод управления осуществим и что ADRC с ACPSO обладает довольно хорошей производительностью.
Авторы [23] продемонстрировали преимущества PSO- и BP-алгоритмов для оптимизации весов нейронной сети. Алгоритм PSO, объединенный с BP-алгоритмом, был использован для регулирования температуры свежего пара. Благодаря предложенной стратегии контроля улучшено качество управления, обеспечены хорошая защита от помех и высокая надежность.
В [24] наилучшие параметры PID-регулятора определяются путем оптимизации хаотического роя частиц (chaotic particle swarm optimization – CPSO). Результат моделирования показал, что PID-регулятор на основе CPSO имеет быструю реакцию на отклонение сигнала и тем самым позволяет достичь хорошего эффекта управления.
Авторы [25] провели комплексную оптимизациию конструкции и минимизацию стоимости рекуперационного парогенератора (heat recovery steam generator – HRSG) с использованием генетического алгоритма. Метод, разработанный с учетом минимальных капитальных затрат и соответствующих заданных ограничений, дает возможность выбирать наилучшие геометрические характеристики и расположение оребренных труб HRSG. Этот метод может быть использован для оптимизации конструкции как существующих, так и новых HRSG.
Авторы [26] предложили применять для проектирования эффективной конструкции котла самоадаптивную схему с алгоритмом светлячка (Firefly ‒ FF) в сочетании с искусственной нейронной сетью, называемой самоадаптивной нейронной моделью FF (self-adaptive firefly-neural model ‒ SAFF-NM). Анализ функций ошибок показал превосходство SAFF-NM над традиционными алгоритмами, такими как нейронная модель (NM) и нейронная модель Firefly (FF-NM).
Хотя рассмотренные стратегии управления демонстрируют их превосходные возможности в отношении превышения регулирования (перерегулирования), времени перерегулирования и помехозащищенности, большинство из них основаны на передаточной функции при фиксированной нагрузке ТЭС. Однако модель управляемого объекта будет меняться с изменением нагрузки. Если параметры регулятора и нагрузка не будут вовремя скорректированы, то это существенно повлияет на качество управления. Если оператор не обладает навыками настройки параметров регулятора, то это может привести к выходу системы управления из-под контроля. Как получить наилучший эффект управления без настройки параметров регулятора при изменении модели объекта управления ‒ ключевая задача исследований в области регулирования температуры свежего пара на тепловых электростанциях.
ОСНОВНЫЕ ИДЕИ ПРИ СОЗДАНИИ VU FUZZY-DMC-РЕГУЛЯТОРА
В данной статье для регулирования температуры свежего пара предлагается стратегия управления, основанная на алгоритме нечеткого динамического матричного управления с универсумом переменных (VU Fuzzy-DMC), разработанная на базе стандартного DMC-регулятора. Рассматриваемый в настоящей работе регулятор может адаптироваться к изменению нагрузки котла. С помощью DMC-алгоритма можно определять параметры модели контролируемого объекта и управлять температурой свежего пара путем скользящей оптимизации и коррекции обратной связи. Нечеткий контроллер с использованием универсума переменных компенсирует ошибку на выходе DMC-регулятора для дальнейшего улучшения эффекта управления. Даже если параметры модели контролируемого объекта изменяются, например нагрузка котла, или возникают помехи, разработанный алгоритм демонстрирует хорошую производительность и надежность управления, о чем свидетельствуют результаты моделирования. Опыт нечеткого контроллера используется для компенсации проблемы снижения управляющего эффекта, когда несоответствие модели является серьезным. Для решения проблем плохой самоадаптации и низкой точности нулевого управления нечетким DMC-регулятором вводится идея универсума переменных. Количественный и масштабный коэффициенты нечеткого контроллера регулируются коэффициентом расширения, чтобы выполнить функцию регулировки универсумом переменных и сделать управление контроллером более точным при малых (близких к нулю) изменениях переменных. Результаты моделирования показывают, что предлагаемый VU Fuzzy-DMC эффективен. В данной работе осуществлены следующие новые идеи.
1. Fuzzy-DMC-регулятор разработан путем объединения нечеткого контроллера с контроллером DMC; выход нечеткого контроллера используется для компенсации ошибки управления алгоритмом DMC.
2. Для повышения адаптивной способности и точности управления Fuzzy-DMC-контроллером вводится универсум переменных, который сжимается или расширяется с уменьшением или увеличением ошибки путем регулирования коэффициента расширения.
СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ СВЕЖЕГО ПАРА
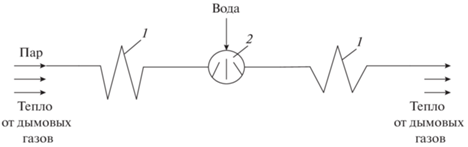
Температура свежего пара является одним из важных показателей производительности тепловой электростанции. Его аномальная температура (слишком высокая или слишком низкая) может привести к экономическим потерям и рискам для безопасности эксплуатации ТЭС. Если температура свежего пара будет слишком высокой, то может быть поврежден пароперегреватель или даже сожжен котел, что серьезно повлияет на безопасность. При слишком низкой температуре свежего пара понизится выходная мощность турбины. Поэтому температура свежего пара поддерживается на заданном уровне. Температура пара регулируется поэтапно. Пароперегреватель тепловой электростанции, расположенный в высокотемпературном дымоходе котла, обычно состоит из нескольких частей. Принципиальная схема системы регулирования температуры свежего пара представлена на рис. 1. Как правило, струя воды принимается в качестве управляющей переменной, а поток пара и тепло дымовых газов (ДГ) ‒ в качестве возмущающего воздействия.
Рис. 1.
Схема системы регулирования температуры свежего пара. 1 ‒ пароперегреватель; 2 ‒ охладитель пара
В течение многих лет регулирование температуры свежего пара на тепловых электростанциях оставалось сложной задачей. Существуют три основные проблемы, обусловливающие сложность управления системой регулирования температуры свежего пара. Первая ‒ большая задержка по времени выходного сигнала. Когда задержка системы регулирования температуры свежего пара слишком велика, управление с обратной связью не может обеспечить удовлетворительного эффекта. Чем больше единичная мощность котла, тем существенней задержка. Вторая проблема заключается в том, что сам процесс управления системой регулирования температуры свежего пара является весьма сложным. Температурные характеристики пара паровых турбин разных типов сильно различаются, поэтому трудно получить точную математическую модель связи между контролируемым объектом и возмущением. Даже если математическая модель объекта будет получена в результате полевых испытаний, модель объекта будет меняться с изменением задержки и условий работы. Третья проблема связана с тем, что температура свежего пара подвержена многим возмущениям.
В настоящее время первую проблему можно решить с помощью технологии двухступенчатого распыления с пароохлаждением, вторую ‒ используя некоторые приближенные модели. Результаты показывают, что упрощенная модель очень близка к реальному объекту. Самая трудная проблема, которую нужно решить, ‒ это уменьшить влияние возмущающих воздействий на объект управления.
В [27] рассматриваются три возмущения, влияющих на систему регулирования температуры свежего пара. Первое возмущение в потоке пара вызвано изменением нагрузки котла, что приводит к изменению температуры в каждой трубе перегревателя. Второе возмущение производится дымовыми газами. Изменение расхода ДГ в дымовой трубе также влияет на температуру пара. Наконец, третье возмущение вызвано перегревом воды. Когда поток воды для охлаждения пара увеличивается или уменьшается, температура пара на входе в пароперегреватель также уменьшается или увеличивается. На изменение нагрузки ТЭС или расхода ДГ в дымовой трубе температура свежего пара может реагировать быстро, однако при возмущении, вызванном перегревом воды, наблюдается довольно большое запаздывание.
Математическую модель регулирования температуры свежего пара при любых режимах работы котла создавать нецелесообразно. Зачастую для разработки математической модели, описывающей температурные характеристики свежего пара, выбирается несколько репрезентативных рабочих точек. Каскадная система регулирования температуры пара, как правило, имеет двухконтурную структуру. Внутренний контур содержит звено с передаточной функцией ${{G}_{1}}\left( s \right),$ дифференциальное звено и PI-регулятор, который используется для грубой регулировки в целях устранения внутренних помех. Внешний контур, используемый для точной настройки температуры свежего пара, состоит из основного регулятора и инерционного звена с передаточной функцией ${{G}_{2}}\left( s \right).$ В общем случае внутренний контур и инерционное звено представляют собой обобщенный объект управления – обобщенный контур. Блок-схема регулятора температуры свежего пара показана на рис. 2.
Рис. 2.
Блок-схема регулятора температуры свежего пара. u(k) – управляющее воздействие; θ1 и θ2 – сигналы на выходе звеньев G1 и G2

Задача системы регулирования температуры свежего пара заключается в использовании возмущения, вызванного перегревом воды, с медленным откликом для преодоления возмущения, вызываемого ДГ, с быстрым откликом. Эта задача является непростой. Внешние возмущающие факторы, влияющие на температуру пара, обычно можно разделить на три категории: расход свежего пара через пароперегреватель, поглощение тепла пароперегревателем и расход воды в охладитель пара. Изменение температуры пара на выходе из пароперегревателя ${{\theta }}(s)$ может быть представлено следующим образом:
(1)
${{\theta }}(s) = [{{G}_{D}}(s){{G}_{Q}}(s){{G}_{W}}(s)]\left[ {\begin{array}{*{20}{c}} {D(s)} \\ {Q(s)} \end{array}} \right],$Из формулы (1) следует, что температура свежего пара на выходе из пароперегревателя ${{\theta }}$ является устойчивым типовым звеном для этих трех факторов, но существенное различие характеристик постоянной времени объекта затрудняет повышение качества регулирования системы температуры пара котла в целом. Как уже отмечалось, температура свежего пара регулируется охлаждающей водой. Действительно, регулирование температуры пара осуществляется с помощью воздействия ${{{{\theta }}}_{1}}$ на ${{{{\theta }}}_{2}}.$ Объект “температура пара” в ведущей секции используется в качестве регулируемой величины для формирования входного сигнала внутреннего контура. Динамические характеристики внутреннего контура являются быстрыми, и большинство из них представляют собой инерционные объекты низкого порядка или одного порядка с малой постоянной времени, в то же время объект “температура пара” в зоне инерции используется в качестве регулируемой величины для формирования входного сигнала, а динамические характеристики внешнего контура представляют собой инерционные объекты высокого уровня с большой постоянной времени. Динамические характеристики основной системы регулирования температуры свежего пара могут быть выражены следующей формулой:
где $Y(s)$ ‒ выход объекта; $U(s)$ ‒ управляющее воздействие;${{G}_{1}}(s) = \frac{{{{K}_{1}} + {{\Delta }_{{{{K}_{1}}}}}}}{{({{T}_{1}} + {{\Delta }_{{{{T}_{1}}}}})s + 1}}$; ${{G}_{2}}(s)$ = $\frac{{{{K}_{2}} + \Delta _{{{{K}_{2}}}}^{n}}}{{{{{\left[ {({{T}_{2}} + {{\Delta }_{{{{T}_{2}}}}})s + 1} \right]}}^{n}}}}$ ‒ передаточные функции звеньев; ${{K}_{1}}$ и ${{K}_{2}}$ ‒ коэффициенты усиления внутреннего контура и инерционного звена; ${{\Delta }_{{{{K}_{1}}}}}$ и ${{\Delta }_{{{{K}_{2}}}}}$ ‒ приращения коэффициента усиления внутреннего контура и инерционного звена при воздействии возмущения; ${{T}_{1}}$ и ${{T}_{2}}$ ‒ постоянные времени внутреннего контура и инерционного звена; ${{\Delta }_{{{{T}_{1}}}}}$ и ${{\Delta }_{{{{T}_{2}}}}}$ ‒ приращения постоянных времени внутреннего контура и инерционного звена при воздействии возмущения.
Качество контроля температуры свежего пара низкое, что отражается в существенном перерегулировании, длительном времени регулирования, нелинейности, большой инерции и значительной временной задержке системы управления. Для повышения качества регулирования важно улучшить два показателя: системную ошибку и качество регулирования.
Обобщенный объект (см. рис. 2), в котором передаточные функции внутреннего контура и инерционного звена в каскадной схеме регулирования объединены в один контур, используется для получения упрощенной эквивалентной модели, что позволяет более эффективно управлять сложной системой регулирования и облегчить проектирование и внедрение регулятора в систему управления. Передаточные функции ведущего звена, инерционного звена и эквивалентной модели чистого запаздывания второго порядка, полученной путем подгонки и упрощения обобщенного объекта управления при различных нагрузках ТЭС, показаны в табл. 1 [28].
Таблица 1.
Характеристики системы регулирования температуры свежего пара при различной нагрузке ТЭС
| Нагрузка, % | ${{G}_{1}}(s)$ | ${{G}_{2}}(s)$ | Эквивалентная модель чистого запаздывания второго порядка $G(s) = \frac{K}{{{{{\left( {Ts + 1} \right)}}^{n}}}}{{e}^{{ - \tau s}}}$ |
|---|---|---|---|
| 37 | $ - \frac{{4.12}}{{{{{(28.4s + 1)}}^{2}}}}$ | $\frac{{1.05}}{{{{{(52.0s + 1)}}^{6}}}}$ | $\frac{{1.05}}{{{{{(110s + 1)}}^{2}}}}{{{\text{e}}}^{{ - 95s}}}$ |
| 58 | $ - \frac{{2.84}}{{{{{(25.5s + 1)}}^{2}}}}$ | $\frac{{1.12}}{{{{{(45.2s + 1)}}^{5}}}}$ | $\frac{{1.12}}{{{{{(72s + 1)}}^{2}}}}{{{\text{e}}}^{{ - 78s}}}$ |
| 75 | $ - \frac{{1.65}}{{{{{(20.2s + 1)}}^{2}}}}$ | $\frac{{1.18}}{{{{{(32.4s + 1)}}^{5}}}}$ | $\frac{{1.18}}{{{{{(55s + 1)}}^{2}}}}{{{\text{e}}}^{{ - 60s}}}$ |
| 100 | $ - \frac{{0.82}}{{{{{(17.6s + 1)}}^{2}}}}$ | $\frac{{1.25}}{{{{{(25.5s + 1)}}^{4}}}}$ | $\frac{{1.25}}{{{{{(42s + 1)}}^{2}}}}{{{\text{e}}}^{{ - 40s}}}$ |
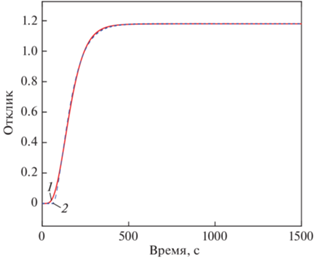
Для проверки эффективности эквивалентной модели чистого запаздывания второго порядка в качестве примера рассматривается тепловая электростанция при 58%-ной нагрузке. Для имитации ступенчатого отклика модели чистого запаздывания второго порядка и эквивалентной модели во внутреннем контуре используется PI-регулятор. После его настройки получены следующие значения пропорционального и интегрального коэффициентов усиления: ${{K}_{p}}$ = ‒9.7 и ${{K}_{i}}$ = ‒0.1. Представленные на рис. 3 данные показывают, что после настройки PI-регулятора кривая ступенчатого отклика эквивалентной модели практически совпадает с моделью чистого запаздывания второго порядка. Следовательно, эквивалентная модель может быть использована для проведения имитационных экспериментов.
FUZZY-DMC-РЕГУЛЯТОР УНИВЕРСУМА ПЕРЕМЕННЫХ
DMC-регулятор. Для управления с большой временнóй задержкой требуется некоторое время, чтобы применяемый закон регулирования отобразился на выходе из объекта после его ввода в объект. Для простого регулятора (такого как PID), зависящего только от токового выхода для управления с обратной связью, применение такого закона регулирования неизбежно приведет к явному перерегулированию и длительному времени настройки. Из-за временнóй задержки сигнала, получаемого от основной системы измерения температуры пара, система не может вовремя получить информацию по обратной связи об управляющем воздействии. Эффект регулирования может быть получен посредством измерения выходного сигнала, при этом интенсивность управляющего воздействия часто бывает слишком большой. Это серьезно влияет на эффективность управления системой регулирования температуры свежего пара. Для улучшения качества регулирования температуры пара целесообразно провести предварительное прогнозирование будущих выходных сигналов. DMC-регулятор может успешно выполнять эту функцию, что считается весьма подходящим для регулирования температуры свежего пара с временнóй задержкой процесса передачи сигнала.
Динамический матричный контроль ‒ это прогнозирующее управление, основанное на ступенчатом отклике. DMC-регулятор состоит из моделей прогнозирования, оптимизации по скользящим показателям и коррекции обратной связи [29]. Модель прогнозирования в DMC получается путем выборки ступенчатого отклика системы, поэтому процесс идентификации обычной модели параметров не рассматривается. Используя технологию многоступенчатого прогнозирования, можно управлять системой с опережением, что позволит решить проблему временнóй задержки. Системой можно управлять, минимизируя отклонение между прогнозируемым выходом и ожидаемым значением, и инкремент управления получается с помощью критерия оптимизации, так что сигнал на выходе системы можно поддерживать на уровне ожидаемого значения.
В общем случае модель ступенчатого отклика для одного входного и одного выходного объекта за время выборки k выглядит следующим образом:
(3)
${{{\mathbf{\bar {y}}}}_{{PM}}}(k) = {{{\mathbf{y}}}_{{P0}}}(k) + {{{\mathbf{A}}}_{k}}\Delta {{{\mathbf{u}}}_{M}}(k),$‒ динамическая матрица, состоящая из коэффициентов ступенчатого отклика системы.
Коэффициенты ступенчатого отклика являются значениями ступенчатого отклика для компонентов выборки. Если $\Delta u(k)$ и начальное значение ${{y}_{{P0}}}(k)$ известны, то ${{{\mathbf{\bar {y}}}}_{{PM}}}$(k) можно получить после идентификации ${{{\mathbf{A}}}_{k}}.$
Используя оптимизацию целевой функции по скользящим показателям, можно максимально приблизить прогнозируемое выходное значение во временнóй области к ожидаемому выходному значению. Показатель эффективности оптимизации системы выбран в виде [30]
(4)
$\min J(k) = \left\| {{{\omega }_{P}}(k) - {{{\bar {y}}}_{{PM}}}(k)} \right\|_{{\mathbf{Q}}}^{2} + \left\| {\Delta {{{\mathbf{u}}}_{M}}(k)} \right\|_{{\mathbf{R}}}^{2},$Используя формулу (4) и полагая $\frac{{{\text{d}}J(k)}}{{{\text{d}}\Delta {{{\mathbf{u}}}_{M}}(k)}} = 0,$ получаем последовательности оптимальных приращений управления в виде
(5)
$\Delta {{{\mathbf{u}}}_{M}}(k) = {{\left( {{\mathbf{A}}_{k}^{{\text{т}}}{\mathbf{Q}}{{{\mathbf{A}}}_{k}} + {\mathbf{R}}} \right)}^{{ - 1}}}{\mathbf{A}}_{k}^{{\text{т}}}{\mathbf{Q}}\left[ {{{\omega }_{P}}(k) - {{{\bar {y}}}_{{PM}}}(k)} \right],$Первым компонентом $\Delta {{{\mathbf{u}}}_{M}}(k)$ является $\Delta u(k).$ Это и есть фактическая управляющая переменная, которая и воздействует на контролируемый объект согласно уравнению
Поскольку оптимальная последовательность приращений управления является оптимальным решением с разомкнутым контуром, система управления с замкнутым контуром получается путем коррекции обратной связи ошибки фактического выхода и прогнозируемого выхода. Ошибка рассчитывается следующим образом:
Ошибка включает в себя различные неопределенные факторы, такие как изменение во времени, случайное возмущение, несогласованность модели и т.д. Начальное значение ${{{\mathbf{y}}}_{{P0}}}(k)$ в момент $(k + 1)T$ (здесь T ‒ единичный интервал времени) также может быть получено в процессе коррекции обратной связи. Описанные шаги необходимо повторить, чтобы реализовать оптимизацию управления переменными в режиме реального времени.
Fuzzy-DMC-регулятор. Несмотря на то что DMC-регулятор имеет хорошие характеристики управления, когда модель является несогласованной, даже если скользящая оптимизация и коррекция обратной связи по ошибкам применяются для исправления выходного значения в реальном времени, в выходных данных все еще остается большая ошибка. Регулятор Fuzzy-DMC компенсирует ошибку путем использования выходного значения нечеткого регулятора, что улучшает качество управления [31]. Нечеткий регулятор обычно бывает одномерным, двумерным или трехмерным. Нечеткий регулятор, имеющий более трех измерений, является очень сложным, поэтому применяется редко. По сравнению с одномерным нечетким регулятором, двумерный нечеткий регулятор обладает лучшей адаптивностью, разнообразной и гибкой структурой, поскольку одновременно учитывает ошибку и скорость ее изменения. Поэтому в данной статье рассматривается двумерный нечеткий регулятор, выбираются три нечеткие лингвистические переменные: отклонение регулируемого параметра на входе $e,$ скорость изменения отклонения $ec$ и сигнал на выходе нечеткого контроллера $u.$
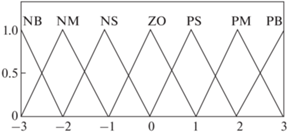
С помощью нечеткого универсума нечеткие лингвистические переменные можно разделить на несколько нечетких множеств. Для обеспечения хорошего эффекта в требуемом диапазоне регулирования эти нечеткие множества должны разумно охватывать весь универсум. Количеству нечетких множеств обычно необходимы положительная и отрицательная симметрия для достижения высокой точности регулирования системы в установившемся режиме и высокая чувствительность, близкая к нулевому отклонению. В соответствии с управляющими характеристиками системы контроля температуры свежего пара нечеткий универсум можно разделить на семь симметричных нечетких множеств: NB, NM, NS, ZO, PS, PM и PB. Соответствующие им нечеткие лингвистические значения являются отрицательными большими (множество NB), отрицательными средними (NM), отрицательными малыми (NS), нулевыми (ZO), положительными малыми (PS), положительными средними (PM) и положительными большими значениями (PB).
Исходя из реальной ситуации, можно предположить, что температура свежего пара стабильна при отклонениях [‒20°С, 20°С] от заданной температуры, а скорость изменения отклонения устанавливается в пределах [‒0.2°С/с, 0.2°С/с]. В то же время отклонение на входе и скорость его изменения количественно определяются в целочисленной области [‒3, 3]. Коэффициенты квантования отклонения и скорости его изменения можно оценить как ${{k}_{e}} = 0.15,$ ${{k}_{{ec}}} = 15.$ Выходные переменные изменяются в диапазоне [‒1, 1], который квантован в целочисленный универсум [‒3, 3]. Выходной масштабный коэффициент составляет ${{k}_{u}} = 0.33.$ Далее выбирается треугольная функция принадлежности регулятора с высокой чувствительностью (рис. 4).
Нечеткое правило ‒ это ключ нечеткого контроллера. Оно должно быть получено на основе экспертных знаний и практического опыта оператора. Когда значение отклонения на входе положительное и скорость его изменения положительная и большая, для предотвращения дальнейшего увеличения отклонения требуется отрицательное и существенное приращение регулирования для подавления тенденции к увеличению отклонения. Когда значение отклонения на входе равно нулю, а скорость его изменения положительна, для точной настройки необходимо вывести небольшое отрицательное значение. Когда отклонение на входе большое и отрицательное, а скорость его изменения положительна и максимальна, отклонение на выходе имеет тенденцию быстро приближаться к нулю. В это время управляющая переменная не может быть задана и она может быть близкой к нулю. Нечеткие правила, составленные в соответствии с приведенными правилами управления и практическим опытом эксплуатации, показаны в табл. 2.
Таблица 2.
Нечеткие правила управления
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| PB | PM | PS | ZO | NS | NM | NB | |
| PB | NB | NB | NM | NM | NS | NS | ZO |
| PM | NB | NB | NM | NS | NS | ZO | ZO |
| PS | NM | NM | NM | NS | ZO | ZO | PS |
| ZO | NM | NS | NS | ZO | PS | PS | PM |
| NS | NS | ZO | ZO | PS | PS | PS | PM |
| NM | ZO | ZO | PS | PS | PS | PM | PM |
| NB | ZO | PS | PS | PM | PM | PB | PB |
В табл. 2 представлено 49 нечетких правил, каждое из которых определяет нечеткую связь. С помощью 49 нечетких взаимосвязей нечеткая информация о значении отклонения на входе и изменении отклонения является нечетко обоснованной и в итоге на выходе может быть получено нечеткое значение регулируемого параметра.
Нечеткая величина, найденная с помощью нечетких рассуждений, отображается из нечеткого универсума в фактический, а затем путем выбора соответствующего алгоритма получается точное значение регулируемой величины. В соответствии с контролируемой температурой свежего пара для реализации дефаззификации системы выбирается центроидный метод.
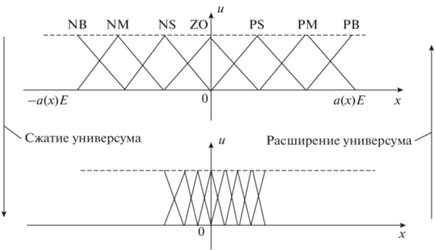
Fuzzy-DMC-регулятор универсума переменных. Нечеткий регулятор может обеспечить хороший эффект управления, когда ошибка велика. При непрерывном процессе управления, когда ошибка постепенно стремится к нулю, грубые нечеткие правила не подходят для точного регулирования, так как приводят к снижению его точности. Согласно принципу нечеткой интерполяции, если нужно повысить точность управления, необходимо увеличить количество нечетких правил вблизи нулевой точки, т.е. универсум лингвистических правил должен сокращаться с непрерывным уменьшением ошибки. При этом точность управления повышается [32].
Когда системная ошибка постепенно снижается, исходный универсум может быть сжат до определенной степени путем его умножения на коэффициент масштабирования. Степень сжатия связана с коэффициентом масштабирования. В это время функция принадлежности становится более узкой. Исходные нечеткие правила и количество нечетких подмножеств не меняются, но те же самые нечеткие правила действуют на меньший нечеткий универсум, заставляя регулятор отрабатывать сигнал вблизи нуля и тем самым осуществлять более точное управление. Это разрешает противоречие между точностью управления и сложностью конструкции регулятора. Принцип универсума переменных проиллюстрирован рис. 5.
Рис. 5.
Принцип универсума переменных. a ‒ коэффициент масштабирования; E ‒ ошибка универсума; x ‒ вход функции коэффициента масштабирования (обозначения на этом рисунке соответствуют стандартной схеме принципа универсума переменных)
Идея универсума переменных использована для повышения точности управления с помощью нечеткого контроллера. Когда несогласованность модели является серьезной, применение такого контроллера может более точно компенсировать температуру и улучшить характеристики управления. Блок-схема управления с использованием VU Fuzzy-DMC-регулятора показана на рис. 6.
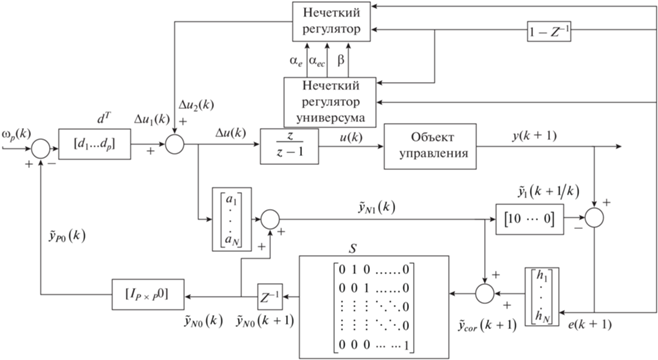
На этом рисунке k ‒ момент выборки; ${{\omega }_{p}}(k)$ ‒ заданное значение температуры свежего пара; ${{d}^{{\text{т}}}} = {{c}^{{\text{т}}}}({{A}^{{\text{т}}}}QA$ + $R{{)}^{{ - 1}}}{{A}^{{\text{т}}}}Q$ = $({{d}_{1}},{{d}_{2}},...,{{d}_{P}})$ ‒ параметр, предназначенный для упрощения изображения на рисунке объединенных матриц; $\Delta {{u}_{1}}(k)$ ‒ приращение управления, рассчитанное DMC-регулятором в текущий момент времени; ${{\alpha }_{e}}$ и ${{\alpha }_{{ec}}}$ ‒ коэффициенты масштабирования входного универсума; $\beta $ ‒ коэффициент масштабирования выходного универсума; $\Delta u(k)$ ‒ конечное приращение управления; $u(k)$ ‒ конечная управляющая переменная; $y(k + 1)$ ‒ фактический сигнал на выходе объекта в момент выборки k + 1; $e(k + 1)$ ‒ отклонение прогнозируемого сигнала от фактического на выходе объекта управления; ${{\tilde {y}}_{{N1}}}(k)$ ‒ прогнозируемый сигнал на выходе объекта управления; ${{\tilde {y}}_{1}}(k + 1\left| {k)} \right.$ ‒ первое значение в прогнозируемой выходной матрице; ${{{\mathbf{\tilde {y}}}}_{{cor}}}(k + 1)$ ‒ компенсированное значение на выходе; S ‒ матрица сдвига; ${{\tilde {y}}_{{N0}}}(k + 1)$ = ${\mathbf{S}} \cdot {{{\mathbf{\tilde {y}}}}_{{cor}}}(k + 1)$ ‒ прогнозируемое значение сигнала на выходе объекта управления без какого-либо управляющего воздействия на систему; ${{\tilde {y}}_{{{\text{P}}0}}}(k)$ ‒ прогнозируемое значение сигнала на выходе DMC-регулятора; $a = {{[{{a}_{1}}, \ldots ,{{a}_{N}}]}^{{\text{т}}}}$ ‒ вектор модели ступенчатого отклика; ${\mathbf{h}} = {{[{{h}_{1}}, \ldots ,{{h}_{N}}]}^{{\text{т}}}}$ ‒ вектор исправления ошибок; Z ‒ Z-преобразование; ${{Z}^{{ - 1}}}$ ‒ задержка на один период выборки; $\left[ {{{I}_{{P \times P}}}0} \right]$ ‒ единичная матрица P-го порядка.
Как показано на рис. 6, в алгоритме управления, разработанном в данной статье, в качестве основного регулятора используется DMC-регулятор, компенсируемый нечетким контроллером для оптимизации прогнозирующего управления. В результате формируется алгоритм нечеткого прогнозирующего управления, в котором используются нечеткие правила для компенсации ошибки прогнозирования. Этот метод отслеживает в режиме реального времени отклонение прогнозируемого значения сигнала от фактического на выходе. Когда отклонение отсутствует, нечеткий контроллер отключен. Когда возникает сигнал рассогласования, на нечеткий регулятор поступает сигнал для компенсации отклонения, при этом его значение принимается в качестве входного значения для нечеткого правила, а затем нечеткий контроллер воздействует на управляемый объект. Для компенсации ошибки прогнозирования реализован нечеткий метод.
Прогнозируемое отклонение, фактическое отклонение на выходе и скорость изменения отклонения принимаются в качестве входных данных нечеткого регулятора и нечеткого регулятора универсума переменных и коэффициент масштабирования универсума нечеткого регулятора вычисляется нечетким контроллером универсума переменных для его настройки, а затем текущее состояние используется для управления путем компенсации $\Delta {{u}_{2}}(k).$ Далее на контролируемый объект подается сигнал $\Delta {{u}_{1}}(k)$ и приращение компенсационного управления $\Delta {{u}_{2}}(k).$ Благодаря наличию нечеткого регулятора универсума переменных эффект управления становится более точным, а надежность обычного DMC-регулятора существенно повышается.
Коэффициент масштабирования обычно является некоторой функцией. Однако не существует методов для выбора ее параметров, поэтому их, как правило, находят методом проб и ошибок. Для системы управления высокой сложности иногда необходимо быстро изменять параметры коэффициента масштабирования, чтобы улучшить эффективность управления регулятором. В [33] авторы предложили метод определения коэффициента масштабирования на основе нечетких правил с использованием экспертных знаний и опыта. Нечеткий вывод довольно прост для понимания, и с его помощью можно решить проблему сложного определения параметров функции коэффициента масштабирования. На вход двумерного нечеткого регулятора масштабирования подается отклонение $e$ и скорость его изменения $ec,$ а на выходе получается сигнал $u.$ Коэффициенты масштабирования входного универсума принимаются равными ${{\alpha }_{e}}$ и ${{\alpha }_{{ec}}},$ а коэффициент масштабирования выходного универсума ‒ $\beta .$
Исходя из реальной ситуации коэффициенты масштабирования на входе и выходе нечеткого регулятора устанавливаются [‒0.3, 0.3] и для переменных на входе определены семь нечетких множеств, которыми являются NB, NM, NS, ZO, PS, PM и PB. Выходной универсум нечеткого регулятора коэффициента масштабирования, используемого для настройки коэффициента квантования в механизме настройки универсума, задается как [0, 1.8], а четыре нечетких множества задаются как MC (medium contraction ‒ среднее сжатие), SC (small contraction ‒ малое сжатие), Z (zero ‒ нуль), SE (small expansion ‒ малое расширение). Для нечеткого регулятора коэффициента масштабирования набор выходных переменных равен [0, 1] и семь нечетких множеств заданы как BC (big contraction ‒ большое сжатие), MC, SC, Z, SE, ME (medium expansion ‒ среднее расширение) и BE (big expansion ‒ большое расширение).
После многочисленных экспериментов была получена нечеткая взаимосвязь между отклонением, скоростью его изменения и коэффициентом масштабирования. Затем были обобщены нечеткие правила коэффициента масштабирования во входном универсуме. Нечеткие правила ${{\alpha }_{e}}$ и ${{\alpha }_{{ec}}}$ входного универсума, а также коэффициента масштабирования $\beta $ выходного универсума представлены в табл. 3. Коэффициент масштабирования $\beta $ определяется отклонением и скоростью его изменения. Нечеткие правила $\beta $ получены после проведения довольно большого числа экспериментов.
Таблица 3.
Нечеткие правила ${{\alpha }_{e}},$ ${{\alpha }_{{ec}}}$ и $\beta $
| ec | e | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| ${{\alpha }_{e}}$ | |||||||
| NB | SE | SE | MC | SC | MC | MC | SE |
| NM | SE | SE | MC | SC | MC | MC | SE |
| NS | MC | MC | Z | Z | Z | MC | MC |
| ZO | MC | Z | Z | Z | Z | MC | MC |
| PS | MC | MC | MC | Z | SC | MC | MC |
| PM | SE | MC | MC | SC | SC | MC | SE |
| PB | SE | SE | MC | SC | SC | SE | SE |
| ${{\alpha }_{{ec}}}$ | |||||||
| NB | SE | SE | MC | SC | MC | MC | SE |
| NM | SE | MC | SC | SC | SC | MC | SE |
| NS | MC | SC | SC | Z | Z | MC | MC |
| ZO | MC | SC | Z | Z | Z | CS | MC |
| PS | MC | MC | MC | Z | SC | MC | MC |
| PM | SE | MC | MC | SC | SC | MC | SE |
| PB | SE | SE | SC | SC | MC | SE | SE |
| $\beta $ | |||||||
| NB | BE | BE | SE | SC | MC | MC | BC |
| NM | BE | SE | SE | Z | SC | SC | SC |
| NS | BE | ME | SE | SE | MC | SC | Z |
| ZO | BE | ME | BE | BC | BE | ME | SE |
| PS | Z | SE | MC | SE | SE | ME | BE |
| PM | SC | SC | SC | Z | SE | SE | BE |
| PB | SC | MC | MC | SC | SE | BE | BE |
МОДЕЛИРОВАНИЕ И ОБСУЖДЕНИЕ РЕЗУЛЬТАТОВ
Верификация разработанного VU Fuzzy-DMC-регулятора для управления системой регулирования температуры свежего пара выполнялась в четырех направлениях:
отслеживание фиксированных значений при согласованной модели;
робастная верификация (при несогласованной модели);
защита от помех;
проверка устойчивости к изменению нагрузки ТЭС.
Для оценки управляющего эффекта разработанного регулятора он сравнивается с PID-, DMC- и Fuzzy-DMC-регуляторами. В качестве модели выбран контролируемый объект при 75%-ной нагрузке ТЭС (см. табл. 1). Опорный сигнал (заданная температура) является ступенчатым, время выборки установлено равным 5 с, время моделирования составляет 2000 с. Коэффициенты усиления PID-регулятора приняты равными ${{K}_{p}}$ = 1.3; ${{K}_{i}}$ = 0.009; ${{K}_{d}}$ = 40.15. Параметры DMC-регулятора следующие:
| Горизонт прогнозирования P .....................30 |
| Контрольный горизонт прогнозирования M ......................................8 |
| Весовые коэффициенты: |
| ${{q}_{j}}$ .................................................................1 |
| ${{r}_{k}}$ .............................................................0.15 |
| Коэффициент коррекции ошибок ${{h}_{i}}$ ............1 |
Значения аналогичных параметров Fuzzy-DMC- и VU Fuzzy-DMC-регуляторов приняты одинаковыми и такими же, как DMC-регулятора.
Переходные характеристики для согласованной модели
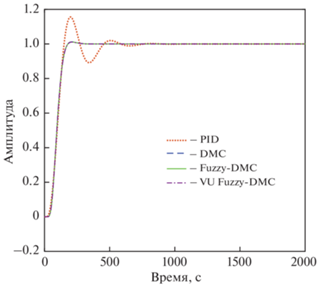
Отклик системы регулирования на ступенчатый сигнал показан на рис. 7 для случая, когда модель соответствует реальному объекту. На этом рисунке видно, что, когда модель полностью согласована, соответствующий нечеткий регулятор универсума переменных не работает. По сравнению с обычным PID-регулятором, остальные три регулятора почти не имеют отклонений при отслеживании данного ожидаемого значения.
Рис. 7.
Переходные характеристики систем управления с регуляторами четырех типов для согласованной модели.
Для сравнения показатели качества управления PID-регулятора и Fuzzy-DMC-регулятора с универсумом переменных приведены в табл. 4. Поскольку бытродействие DMC-, Fuzzy-DMC- и VU Fuzzy-DMC-регуляторов практически одинаково, в табл. 4 представлены данные только для VU Fuzzy-DMC- и PID-регуляторов.
Таблица 4.
Показатели качества PID- и VU Fuzzy-DMC-регуляторов для согласованной модели
| Регулятор | Отклонение, % | Время регулирования, с |
|---|---|---|
| PID | 18.0 | 870 |
| VU Fuzzy-DMC | 0.1 | 255 |
Из табл. 4 следует, что для согласованной модели отклонение сигнала при использовании обычного каскадного PID-регулятора составляет 18% и достигает устойчивого состояния после 870 с от начала переходного процесса, тогда как для VU Fuzzy-DMC-регулятора отклонение составляет всего 0.1%, и поэтому можно сказать, что отклонения практически нет, и система переходит в устойчивое состояние уже после 255 с от начала переходного процесса. Таким образом, производительность системы с VU Fuzzy-DMC-регулятором отличная.
Когда модель согласована, через 1200 с после того, как система переходит в устойчивое состояние, опорный сигнал задания увеличивают на 20%. Результаты, приведенные на рис. 8, свидетельствуют о превосходном быстродействии VU Fuzzy-DMC-регулятора.
Рис. 8.
Переходные характеристики систем управления с регуляторами четырех типов при ступенчатом изменении опорного сигнала задания для согласованной модели
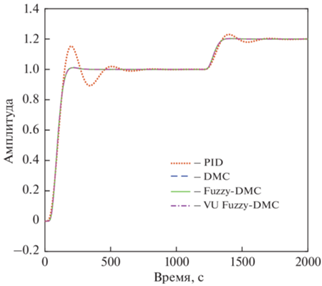
Рисунок 8 показывает, что для согласованной модели подача на вход регулятора ступенчатого сигнала не оказывает влияния на нечеткий регулятор. Таким образом, зависимости отклонения от времени, полученные на выходе DMC-, Fuzzy-DMC- и VU Fuzzy-DMC-регуляторов, в точности совпадают. После изменения заданной температуры в обычном каскадном PID-регуляторе возникают колебания, а DMC-, Fuzzy-DMC- и VU Fuzzy-DMC-регуляторы отслеживают заданное значение температуры без отклонений. Для достижения устойчивого состояния требуется всего 200 с, что свидетельствует об отличных характеристиках регуляторов. Показатели качества PID- и VU Fuzzy-DMC-регуляторов при изменении опорного сигнала (температуры) приведены в табл. 5. В этой таблице, аналогично табл. 4, представлены данные только для PID- и VU Fuzzy-DMC-регуляторов, поскольку быстродействие DMC-, Fuzzy-DMC-, Fuzzy-DMC-регуляторов и VU Fuzzy-DMC-регулятора практически одинаковое.
Таблица 5.
Показатели качества PID- и VU Fuzzy-DMC-регуляторов при ступенчатом изменении опорного сигнала задания для согласованной модели
| Регулятор | Отклонение, % | Время регулирования, с |
|---|---|---|
| PID | 5.0 | 550 |
| VU Fuzzy-DMC | 0 | 180 |
На рис. 8 и в табл. 5 видно, что для согласованной модели, когда заданное значение температуры увеличивают на 20%, применение обычного каскадного PID-регулятора приводит к колебаниям температуры. Для этого регулятора отклонение составляет 5% и система достигает устойчивого состояния через 550 с после изменения опорного сигнала (см. табл. 5). При использовании VU Fuzzy-DMC-регулятора колебания температуры отсутствуют и система переходит в устойчивое состояние уже через 180 с после начала настройки регулятора. Быстродействие такой системы управления превосходно.
Робастная верификация
В процессе регулирования температуры свежего пара она практически всегда изменяется под воздействием внешней среды. Параметры модели контролируемого объекта не являются неизменными и будут претерпевать колебания, обусловленные влиянием различных факторов, что приведет к определенным изменениям коэффициентов передаточной функции. Робастность системы ‒ способность справляться с различными возмущениями, поэтому очень важно проверить робастные характеристики системы управления. Для этого в данной работе коэффициент усиления $K$ и постоянная времени $T$ эквивалентной модели $G\left( s \right)$ (см. табл. 1) увеличиваются одновременно на 20%, а другие параметры моделирования остаются неизменными. Сигнал на выходе системы для этого случая показан на рис. 9, а. Результат моделирования, когда время задержки контролируемого объекта τ увеличивается на 30 с, а другие параметры остаются неизменными, представлен на рис. 9, б.
Рис. 9.
Переходные характеристики систем управления с регуляторами четырех типов при увеличении на 20% постоянной времени и коэффициента усиления (а) и увеличении времени задержки на 30 с (б)
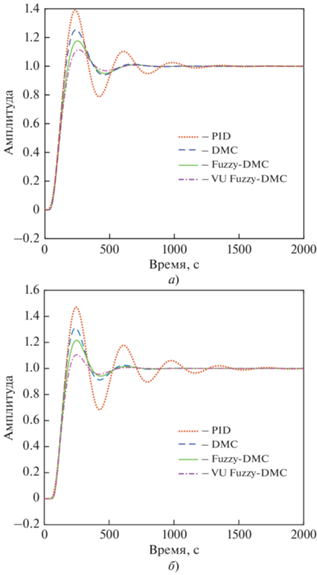
На рис. 9, а и 9, б видно, что для несогласованной модели при изменении параметров объекта или увеличении времени задержки обычный каскадный PID-регулятор показывает наибольшее отклонение сигнала, при этом время регулирования является самым длительным, а эффект управления ‒ наихудшим. Если применяются DMC- и Fuzzy-DMC-регуляторы, отклонение сигнала и время регулирования в определенной степени улучшаются, а качество управления остается примерно таким же. При использовании же VU Fuzzy-DMC-регулятора отклонение еще более снижается по сравнению с работой Fuzzy-DMC-регулятора, что демонстрирует его высокую надежность. Показатели качества четырех регуляторов для несогласованной модели приведены в табл. 6.
Таблица 6.
Показатели качества регуляторов для несогласованной модели
| Регулятор | Отклонение, % | Время регулирования, с | ||
|---|---|---|---|---|
| одновременное увеличение $K$ и $T$ на 20% | увеличение времени задержки τ на 30 с | одновременное увеличение $K$ и $T$ на 20% | увеличение времени задержки τ на 30 с | |
| PID | 40 | 48 | 1300 | 1800 |
| DMC | 24 | 30 | 800 | 750 |
| Fuzzy-DMC | 10 | 18 | 800 | 750 |
| VU Fuzzy-DMC | 10 | 12 | 600 | 550 |
Согласно данным, представленным в табл. 6, при использовании обычного каскадного PID-регулятора отклонение сигнала достигает 40 и 48%, когда несогласованность модели вызвана увеличением коэффициентов передаточной функции $G\left( s \right)$ и времени задержки τ, а время регулирования достигает 1300 и 1800 с. Эффект управления в этом случае наихудший. При использовании DMC-регулятора отклонение значительно снижается и составляет 24 и 30%, а время регулирования сокращается почти вдвое. Если применять Fuzzy-DMC-регулятор, отклонение снижается еще больше. После введения универсума переменных отклонение сигнала будет оптимизировано еще лучше и составит всего 10 и 12%. По сравнению с обычным PID-регулятором, отклонение снизится на 30 и 36%, а время регулирования составит всего 600 и 550 с, что меньше на 700 и 1250 с. Система управления с VU Fuzzy-DMC демонстрирует отличную производительность и высокую надежность.
Способность регулятора предотвращать внешние возмущения
Поскольку температура свежего пара практически всегда изменяется под воздействием внешней среды, стабильная работа тепловой электростанции будет нарушаться. Независимо от того, является ли модель согласованной или нет, необходимо учитывать некоторые неизбежные факторы, такие как возмущения, вносимые дымовыми газами и потоком пара. Поэтому следует провести проверку системы регулирования на устойчивость к таким возмущениям.
Для согласованной модели контролируемого объекта возмущение, вызванное дымовыми газами, с амплитудой 0.1 вводится в систему через 1200 с после начала регулирования (рис. 10, а).
Рис. 10.
Результаты моделирования отклика систем управления с регуляторами четырех типов для согласованной (а) и несогласованной (б) модели после введения возмущения, вносимого дымовыми газами
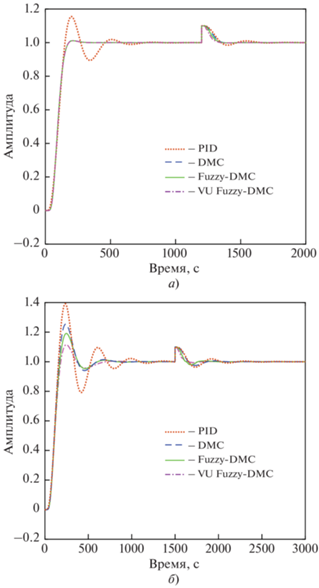
Рисунок 10, а показывает, что для согласованной модели управляемого объекта и добавления возмущения после него системы с DMC-, Fuzzy-DMC- и VU Fuzzy-DMC-регуляторами стабилизируются и возвращаются к заданной температуре без дальнейших отклонений. По времени отклика и времени погашения отклонения VU Fuzzy-DMC-регулятор имеет лучшие характеристики, чем три других регулятора, что свидетельствует о высокой способности этого регулятора устранять помехи.
Когда модель контролируемого объекта не является согласованной, возмущение, вызванное дымовыми газами, с амплитудой 0.1 вводится в систему позднее, через 1500 с, после начала процесса регулирования (рис. 10, б). Такой сдвиг по времени обусловлен тем, что стабилизация сигналов в несогласованной модели наступает позднее, чем в согласованной.
На рис. 10, б видно, что при добавлении возмущения VU Fuzzy-DMC-регулятор возвращает систему к заданному ожидаемому значению температуры в кратчайшие сроки, в то время как Fuzzy-DMC-регулятору требуется для этого большее время. DMC- и PID-регуляторы показывают наихудшие результаты. VU Fuzzy-DMC-регулятор возвращается к заданному значению температуры без отклонений в большую или меньшую сторону, в то время как остальные три регулятора показывают колебания сигнала. Разработанная система с VU Fuzzy-DMC-регулятором демонстрирует отличную способность предотвращать возмущения и для несогласованной модели.
Данные по быстродействию четырех регуляторов после добавления возмущения приведены в табл. 7. Регулятор VU Fuzzy-DMC имеет наилучшие характеристики: время регулирования равно всего 90 с, колебания температуры отсутствуют. Три остальных регулятора допускают более или менее существенные колебания температуры, а предлагаемый в настоящей работе VU Fuzzy-DMC-регулятор демонстрирует превосходный эффект управления.
Изменение нагрузки ТЭС
Как известно, в ночное время нагрузка ТЭС значительно снижается. Если она падает с 75 до 58%, то при использовании обычной системы каскадного PID-управления эффект регулирования температуры пара существенно ухудшится, если параметры PID-регулятора не будут вовремя откорректированы. В настоящем исследовании для управляемого объекта выбирается математическая модель передаточной функции при нагрузке 58% (см. табл. 1). Результаты моделирования температуры свежего пара при нагрузке 58% (параметры передаточных функций регуляторов остаются неизменными) показаны на рис. 11.
Рис. 11.
Моделирование температуры свежего пара при нагрузке 58% (параметры передаточных функций регуляторов остаются неизменными)
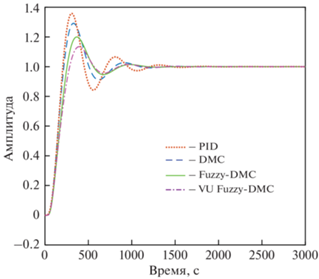
Как видно на этом рисунке, при условии, что параметры передаточной функции регулятора не изменяются, после снижения нагрузки отклонения и время регулирования при использовании обычного каскадного PID-регулятора являются наибольшими. По сравнению с PID-, DMC- и Fuzzy-DMC-регуляторами, представленный в настоящей работе VU Fuzzy-DMC-регулятор показывает наилучшие характеристики (табл. 8).
ВЫВОДЫ
1. Описанный в настоящей работе Fuzzy-DMC-регулятор с универсумом переменных по качеству регулирования (времени регулирования и отклонению сигнала от заданного значения) превосходит как обычный каскадный PID-регулятор, так и DMC- и Fuzzy- DMC-регуляторы.
2. VU Fuzzy-DMC-регулятор имеет наилучшие характеристики регулирования при внешних возмущениях, вызванных как воздействием дымовых газов и потока пара, так и изменением нагрузки на ТЭС в ночное время.
3. Алгоритмы управления, предложенные в данной статье, рекомендуется вводить в систему управления реальной электростанцией. При использовании VU Fuzzy-DMC-регулятора следует уделять особое внимание протоколам, функциям связи, резервного копирования и загрузки в системе управления. Эти функциональные программы нужно обновлять одновременно, чтобы достичь синхронной работы с алгоритмом управления. В то же время эти программы необходимо многократно тестировать, чтобы обеспечить стабильную работу системы управления.
4. В связи с матричными операциями высокого порядка, задействованными в алгоритме VU Fuzzy-DMC, и ограниченной памятью регулятора следует обратить внимание на выделение памяти под эти операции.
5. Проведенное в данной работе исследование привело к некоторым ожидаемым результатам, но есть также отдельные проблемы, которые нужно дополнительно изучить в будущем. Во-первых, математическая модель контролируемого объекта создается в определенных идеальных условиях. В реальной промышленной системе температура свежего пара подвергается воздействию внешней среды и возмущающие факторы влияют один на другой. Кроме того, при моделировании задается только одно ступенчатое возмущение для проверки эффективности системы управления отслеживать и гасить это возмущение. Однако на фактическую температуру свежего пара тепловой электростанции влияние оказывают многие факторы окружающей среды, которое довольно трудно предсказать.
Список литературы
Improvements of feedwater controller for the super fast reactor / Y. Ishiwatari, C.H. Peng, S. Ikejiri, H. Oka // J. Nucl. Sci. Technol. 2010. V. 47. Is. 12. P. 1155‒1164. https://doi.org/10.1080/18811248.2010.9720982
Polton C., Boje E. Quantitative feedback theory design of valve position control for co-ordinated superheater control of main steam temperatures of power plant boilers // IFAC-PapersOnLine. 2020. V. 53. Is. 2. P. 13070‒13075. https://doi.org/10.1016/j.ifacol.2020.12.2255
Tian Z., Ren Y., Wang G. Fuzzy-PID controller based on variable universe for main steam temperature system // Aust. J. Electr. Electron. Eng. 2018. V. 15. Is. 1‒2. P. 21‒28. https://doi.org/10.1080/1448837X.2018.1490163
Lv Z., Zhang Y. Application of Fuzzy control based on time series prediction algorithm in main steam temperature system // Proc. of the 2018 Chinese Automation Congress. Xi’an, China, 30 Nov.‒2 Dec. 2018. https://doi.org/10.1109/CAC.2018.8623673
Wang T., Han C.Y., Jiang C.J. Design and simulation of main steam temperature controller based on interval type-2 fuzzy logic systems // ICIC Express Lett. Part B: Applications. 2013. V. 4. Is. 5. P. 1359‒1365.
Mi H., Peng C., Cheng C. Modeling of main steam temperature using an improved Fuzzy particle swarm optimization algorithm // Communications in Computer and Information Science / Ed. by M. Fei, K. Li, Z. Yang, Q. Niu, X. Li. Singapore: Springer, 2020. V. 1303. P. 123‒136. https://doi.org/10.1007/978-981-33-6378-6_10
Superheated steam temperature control using fuzzy logic controller / B. Hozifa, F.-E. Osman, H.-E. I. Yaser, M.H. Eltaher, M. Dalia // Am. Sci. Res. J. Eng., Technol. Sci. (ASRJETS). 2016. V. 17. № 1. P. 34‒41.
Nahlovsky T. Optimization of fuzzy controller parameters for the temperature control of superheated steam // Procedia Eng. 2015. V. 100. P. 1547‒1555. https://doi.org/10.1016/j.proeng.2015.01.527
Tian Z. Main steam temperature control based on GA-BP optimised fuzzy neural network // Int. J. Eng. Syst. Modell. Simul. 2017. V. 9. Is. 3. P. 150‒160. https://doi.org/10.1504/IJESMS.2017.085057
Yong Z., Dang J. Application of PSO-BP neural network in main steam temperature control // Proc. of the 28th Chinese Control and Decision Conf. Yinchuan, China, 28‒30 May 2016. P. 5607‒5611. https://doi.org/10.1109/ccdc.2016.7532000
The application of BPNN based on improved PSO in main steam temperature control of supercritical unit / Y. Sun, J. Gao, H. Zhao, D. Peng, Liqin // Proc. of the 22nd Intern. Conf. on Automation and Computing. Colchester, UK, 7‒8 Sept. 2016. P. 188‒192. https://ieeexplore.ieee.org/document/7604916
Sensitivity analysis on neural network algorithm for primary superheater spray modeling / N.A. Mazalan, A.A. Malek, M.A. Wahid, M. Mailah // Heat Transfer Eng. 2017. V. 38. Is. 4. P. 417‒422. https://doi.org/10.1080/01457632.2016.1195134
Naseri A.M., Yazdizadeh A. Neural network-based IMC-PID controller design for main steam temperature of a power plant // Proc. of the 6th Intern. Symp. on Neural Networks. Wuhan, China, 26‒29 May 2009. P. 1059‒1068. https://doi.org/10.1007/978-3-642-01510-6_120
Wang D., Wu X., Shen J. An efficient robust predictive control of main steam temperature of coal-fired power plant // Energies. 2020. V. 13. Is. 15. P. 3775. https://doi.org/10.3390/en13153775
Multivariable constrained predictive control of main steam temperature in ultra-supercritical coal-fired power unit / G.-L. Wang, W.-W. Yan, S. Chen, H.-H. Shao // J. Energy Inst. 2015. V. 88. Is. 2. P. 181‒187. https://doi.org/10.1016/j.joei.2014.06.003
Tian Z., Li S., Wang Y. Generalized predictive PID control for main steam temperature based on improved PSO algorithm // J. Adv. Comput. Intell. Intell. Inform. 2017. V. 21. No. 3. P. 507‒517. https://doi.org/10.20965/jaciii.2017.p0507
Combined moving horizon estimation and model predictive control for main steam temperature system / H. Hu, Y. Li, Q. Yang, Y. Cai // Proc. of the 36th Chinese Control Conf. (CCC). Dalian, China, 26‒28 July 2017. P. 3134‒3139. https://doi.org/10.23919/ChiCC.2017.8027840
Sindareh-Esfahani P., Tabatabaei S.S., Pieper J.K. Model predictive control of a heat recovery steam generator during cold start-up operation using piecewise linear models // Appl. Therm. Eng. 2017. V. 119. P. 516‒529. https://doi.org/10.1016/j.applthermaleng.2017.03.041
Sanchez-Lopez A., Arroyo-Figueroa G., Villavicencio-Ramirez A. Advanced control algorithms for steam temperature regulation of thermal power plants // Int. J. Electr. Power Energy Syst. 2004. V. 26. Is. 10. P. 779‒785. https://doi.org/10.1016/j.ijepes.2004.08.003
Implementation of high availability SCADA system for superheater steam temperature control in a 210 MW thermal power plant / J. Mathew, S.S. Shankar, H. Pratheesh, R.B. Singh, C.S. Lajitha, I.A. Muhammed // Proc. of the 2014 IEEE Intern. Conf. on Electronics, Computing and Communication Technologies (CONECCT). Bangalore, India, 6‒7 Jan. 2014. https://doi.org/10.1109/CONECCT.2014.6740354
Pérez R.R., Geddes A., Clegg A. Adaptive predictive expert control of superheated steam temperature in a coal-fired power plant // Int. J. Adapt. Control Signal Process. 2012. V. 26. Is. 10. P. 932‒944. https://doi.org/10.1002/acs.2318
Parameters optimization of ADRC based on adaptive CPSO algorithm and its application in main-steam temperature control system / G. Hou, M. Wang, L. Gong, J. Zhang // Proc. of the 13th IEEE Conf. on Industrial Electronics and Applications. Wuhan, China, 31 May–2 June 2018. P. 497‒501. https://doi.org/10.1109/ICIEA.2018.8397768
Wei L., Junmin Z. Particle swarm optimization PID neural network control method in the main steam temperature control system // Proc. of the 2012 Intern. Conf. on Computer Science and Electronics Engineering. Hangzhou, China, 23‒25 Mar. 2012. V. 02. P. 137‒140. https://doi.org/10.1109/ICCSEE.2012.289
Keliang Z., Jieqiong Q. PID controller parameters tuning of main steam temperature based on chaotic particle swarm optimization // Proc. of the 2011 IEEE Intern. Conf.on Computer Science and Automation Engineering. Shanghai, China, 10‒12 June 2011. P. 647‒650. https://doi.org/10.1109/CSAE.2011.5952759
Rezaie A., Tsatsaronis G., Hellwig U. Thermal design and optimization of a heat recovery steam generator in a combined-cycle power plant by applying a genetic algorithm // Energy. 2019. V. 168. P. 346‒357. https://doi.org/10.1016/j.energy.2018.11.047
Savargave S.B., Lengare M.J. Self-adaptive firefly algorithm with neural network for design modelling and optimization of boiler plants // Proc. of the 2017 Intern. Conf. on I-SMAC (IoT in Social, Mobile, Analytics and Cloud). Palladam, India, 10‒11 Febr. 2017. P. 289‒293. https://doi.org/10.1109/I-SMAC.2017.8058357
Guang C., Feng Q., Keqin D. Methods and systems for high-temperature strain measurement of the main steam pipe of a boiler of a power plant while in service // J. Opt. Soc. Korea. 2016. V. 20. Is. 6. P. 770‒777. https://doi.org/10.3807/JOSK.2016.20.6.770
Modeling of main steam temperature using an improved fuzzy genetic algorithm / C. Cheng, C. Peng, D. Zeng, T. Zhang // Proc. of the 39th Chinese Control Conf. Shenyang, China, 27‒29 July 2020. P. 1196‒1202. https://doi.org/10.23919/CCC50068.2020.9188991
Practical PLC-based implementation of adaptive dynamic matrix controller for energy-efficient control of heat sources / T. Klopot, P. Skupin, P. Grelewicz, J. Czeczot // IEEE Trans. Ind. Electron. 2021. V. 68. Is. 5. P. 4269‒4278. https://doi.org/10.1109/TIE.2020.2987272
Tian Z. Networked control system time-delay compensation based on PI-based dynamic matrix control // at-Automatisierungstechnik. 2021. V. 69. Is. 1. P. 41‒51. https://doi.org/10.1515/auto-2020-0020
Moon U.-C., Lee K.Y. An adaptive dynamic matrix control with Fuzzy-interpolated step-response model for a drum-type boiler-turbine system // IEEE Trans. Energy Convers. 2021. V. 26. Is. 2. P. 393‒401. https://doi.org/10.1109/TEC.2011.2116023
Cao Z., Zheng S. MR-SAS and electric power steering variable universe fuzzy PID integrated control // Neural Comput. Appl. 2019. V. 31. Is. 4. P. 1249‒1258. https://doi.org/10.1007/s00521-017-3157-7
Hu D., Jiang T., Yu X. Construction of non-convex fuzzy sets and its application // Neurocomput. 2020. V. 393. P. 175‒183. https://doi.org/10.1016/j.neucom.2018.10.111
Дополнительные материалы отсутствуют.
Инструменты
Теплоэнергетика