

Акустический журнал, 2023, T. 69, № 1, стр. 63-72
Акустический центр измерительного гидрофона
А. Е. Исаев a, *, Б. И. Хатамтаев a
a Всероссийский научно-исследовательский институт физико-технических и радиотехнических измерений
(ФГУП “ВНИИФТРИ”)
141570 г.п. Менделеево, Московская область, Россия
* E-mail: isaev@vniiftri.ru
Поступила в редакцию 28.01.2022
После доработки 28.06.2022
Принята к публикации 05.07.2022
- EDN: CPOOSX
- DOI: 10.31857/S0320791922060053
Аннотация
Рассмотрены различные подходы к формулировке определения акустического центра преобразователя и проблемы, возникающие при их использовании для экспериментального определения положения акустического центра. Обсуждены причины, по которым формулировка и соответствующий способ определения положения акустического центра микрофона мало пригодны для гидрофона. Описан эксперимент, демонстрирующий предложенный способ экспериментального определения положения акустического центра гидрофона при его фазовой калибровке методом взаимности.
ВВЕДЕНИЕ
Акустический центр (АЦ) преобразователя – одно из базовых понятий в акустике. Изначально под АЦ понималась точка в пространстве, из которой исходит сферическая звуковая волна источника звука. Разработка метода взаимности, в котором используют излучатель, приемник и обратимый преобразователь, потребовала распространить понятие АЦ на преобразователи, участвующие в измерительной процедуре метода. В формулу метода взаимности входит расстояние между преобразователями. Понятие расстояния подразумевает наличие двух точек, разнесенных в пространстве. Преобразователи имеют конечные размеры, иногда сложную форму, поэтому возникла необходимость определиться с тем, какие именно точки на преобразователях (а может быть, около них, как у микрофонов) следует выбрать, чтобы измерить расстояние. Если для излучателя в качестве такой точки выбрать АЦ, то для излучающего звук обратимого преобразователя такой точкой будет его АЦ в режиме излучения. Свойство обратимости и взаимности преобразователя позволяют воспринимать эту точку, как АЦ в режиме приема. Таким образом, точка, к которой применимо понятие АЦ, появляется у приемника.
Подчеркнем, что пока речь шла о понятиях, а не о дефинициях, тем более способах экспериментального определения АЦ. Как только от понятий переходим к эксперименту, возникает проблема – как правильно заменить протяженный объект единственной точкой, причем точкой, имеющей как геометрический, так и акустический смысл. И только установив этот смысл, оказывается возможным перейти к расстояниям. Очевидно, что адекватно заменить протяженный объект единственной точкой невозможно. Эта замена всегда условна. Например, в механике тело заменяют центром масс. Применение такой модели имеет очевидные ограничения, но позволяет решать широкий круг задач, в том числе практических. Понятие АЦ также успешно применяют в ряде акустических задач, помня об ограничениях, связанных с такой заменой. Первое ограничение связано с самой формулировкой определения, которую можно использовать на практике. Например, звук, исходящий от реального излучателя, формируется не только колеблющейся поверхностью активного элемента, но и дифракцией на всех элементах конструкции излучателя. Возникает вопрос – что считать излучателем звука. Громкоговоритель не испытывают без корпуса, а если корпуса нет, то помещают в экран стандартизованной формы и размеров. Это делают для того, чтобы приблизить свойства испытуемого объекта к тем, которые будут в условиях реальной эксплуатации.
Те же самые проблемы характерны для подводной акустики. При подготовке к ключевым международным сличениям МКМВ пришлось договориться, что артефактом, подлежащим калибровке, является система, объединяющая в себе активный элемент, корпус и крепление гидрофона. Поскольку отразить краткой формулировкой многообразие свойств физического явления невозможно, удачность формулировки определения можно оценить ее практической применимостью.
В воздушной акустике существуют различные подходы к дефиниции АЦ микрофона. Несмотря на это, для микрофона удалось выработать определение АЦ, которое обеспечивает современную точность акустических эталонов. Казалось бы, логично применить это определение к гидрофону. К сожалению, для измерений комплексной частотной характеристики чувствительности гидрофона это определение оказалось неудачным. Цель настоящей работы – обсуждение вопросов, связанных с определением АЦ измерительного гидрофона.
ПРОБЛЕМЫ ПРАКТИЧЕСКОГО ИСПОЛЬЗОВАНИЯ ОПРЕДЕЛЕНИЙ АКУСТИЧЕСКОГО ЦЕНТРА
В [1] понятие АЦ рассматривают двояко: как положение точки, из которой сферические волновые фронты кажутся расходящимися, либо звуковое давление изменяется обратно пропорционально расстоянию от этой точки.
Согласно [2] АЦ микрофона-преобразователя в режиме излучения на данной частоте синусоидального сигнала и для определенного направления и расстояния есть точка, из которой расходятся волны с фронтом, близким к сферическому, на поверхности в окрестности точки наблюдения.
На первый взгляд определение выглядит очень наглядным и понятным: есть точка наблюдения, есть направление и расстояние (дальнее поле), на котором формируется фронт волны, близкий к сферическому. Но если вчитаться внимательнее, возникают вопросы. Что такое окрестность точки наблюдения? Что такое поверхность в этой окрестности? Наконец, что понимать под фронтом гармонической волны, поскольку обычно под фронтом волны понимают пограничную поверхность, отделяющую среду возмущенную от среды невозмущенной.
Поставленные вопросы снимаются, если учесть, что приведенная формулировка определения – результат практических договоренностей. Тогда, поверхность – это поверхность мембраны микрофона-приемника, окрестность равна диаметру мембраны, расстояние – расстояние между АЦ, направление – опорное направление, используемое при калибровке, близкий к сферическому фронт – выполнение закона 1/r, синусоидальный сигнал – сигнал, используемый при калибровке. Этим однозначно определяется способ определения АЦ микрофона при калибровке, который осуществляют на основе оценки близости зависимости звукового давления от расстояния к закону 1/r.
Рассмотренному определению вторит электроакустический словарь [3]. Виртуальный акустический центр – для электроакустического преобразователя, используемого для излучения звука, в определенном направлении, для определенной частоты и диапазона расстояний, положение виртуального точечного источника, от которого звуковое давление изменяется обратно пропорционально расстоянию.
Чтобы понять, почему в определении сделан упор на закон 1/r, следует обратиться к использованному в словаре эквиваленту этого термина: “эффективный акустический центр”. В акустике понятие “эффективный” принято применять к энергетическим и связанным с ними силовым величинам, в нашем случае – к амплитуде звукового давления.
В стандарте на калибровку гидрофонов [4] использовали другое определение АЦ – точка на преобразователе или рядом с ним, из которой расходящиеся сферически звуковые волны, излучаемые этим преобразователем и наблюдаемые в удаленных точках, кажутся расходящимися.
Особенность этого определения – множество удаленных точек, в которых волна рассматривается как сферическая. Как следствие такого определения – два подхода к определению положения АЦ гидрофона: оценка близости зависимости звукового давления от расстояния к закону 1/r или оценка близости волновой поверхности к сфере. В самом стандарте рекомендован первый подход, который успешно применяют для микрофонов [5].
Экспериментальное определение АЦ основано на зависимости звукового давления от расстояния $\left| {p\left( r \right)} \right|$ в поле сферической волны:
где ${{\Delta }}r$ – смещение АЦ относительно точки, принятой в эксперименте за начало отсчета расстояния. Тогда(1)
${{\Delta }}r = r - \frac{{{1 \mathord{\left/ {\vphantom {1 {\left| {p\left( r \right)} \right|}}} \right. \kern-0em} {\left| {p\left( r \right)} \right|}}}}{{\frac{{\partial \left( {{1 \mathord{\left/ {\vphantom {1 {\left| {p\left( r \right)} \right|}}} \right. \kern-0em} {\left| {p\left( r \right)} \right|}}} \right)}}{{\partial r}}}}.$В [1] показано, что для излучателя “пульсирующая сфера” АЦ, определенный по формуле (1), совпадает с геометрическим центром сферы. Чтобы избежать неустойчивости решения уравнения (1) при обработке экспериментальных зависимостей, дифференцированию подвергают либо усредненные (сглаженные) зависимости, либо используют оценки, полученные методом наименьших квадратов.
Покажем, к чему приводит применение этого приема в условиях интерференционных искажений звукового поля волной, рассеянной как излучателем и гидрофоном-приемником, так и подводными конструкциями эталонной установки, применяемыми для позиционирования преобразователей под водой. На рис. 1а в относительных единицах приведены графики ${{\left| {p\left( r \right)} \right|}^{{ - 1}}}$, построенные по результатам измерений в отсутствие (ряд А) и при наличии (ряд В) рассеяния. “Идеальные” измерения в отсутствие рассеяния получены для бескорпусных излучателя и гидрофона, выполненных в виде сфер, и вывешенных под водой на собственных кабелях без применения каких-либо дополнительных креплений. В качестве опорных точек при определении расстояния использовали геометрические центры активных элементов излучателя и приемника. Рядом 1 представлена прямая, дающая наилучшее приближение “идеальной” зависимости ${{\left| {p\left( r \right)} \right|}^{{ - 1}}}$ по методу наименьших квадратов. Поскольку точка пересечения этой прямой с осью расстояний практически совпадает с началом координат, геометрические центры активных элементов могут быть приняты за АЦ излучателя и гидрофона.

Зависимость, полученная при тех же параметрах эксперимента с использованием креплений гидрофона (ряд В), заметно отличается от “идеальной”. Точка пересечения прямой (ряд 2), рассчитанной по методу наименьших квадратов для ряда В, с осью расстояний оказывается существенно смещенной относительно начала координат. В этой ситуации в соответствии с рекомендациями стандарта необходимо ввести поправку в измерительные расстояния. Прямая (ряд 3), дающая наилучшее приближение скорректированной зависимости (ряд С), проходит через начало координат, однако, очевидно, что коррекция только ухудшила результат, поскольку ряд С оказывается более смещенным относительно “идеальной” зависимости, чем ряд В.
Смещение ряда С относительно ряда А зависит от того, насколько значительно различаются по углу наклона прямые наилучшего приближения, представленные рядами 1 и 2 на рис. 1а.
Это показано на рис. 1б, где рядами 1, 2 и 3 представлены прямые наилучшего приближения ряда В, полученные на различных интервалах измерительных расстояний: 45–62.5 см (ряд 1), 55–75 см (ряд 2) и 40–85 см (ряд 3). В зависимости от выбранного интервала расстояний угол наклона прямой наилучшего приближения ряда В может отличаться от угла наклона прямой наилучшего приближения ряда А (проходящей через начало координат) как по знаку, так и по величине. Причем это отличие может оказаться весьма значительным. Очевидно, что введение поправки к измерительным расстояниям в таком случае может приводить как к неразумно большим погрешностям в определении расстояния между АЦ преобразователей, так и к неправильной оценке этих погрешностей.
Отметим, что источниками рассеяния звука являются не только крепления гидрофона, но и корпус гидрофона, штанги, на которые устанавливают гидрофон, и вообще все, что окружает гидрофон во время эксперимента. Большое влияние рассеяния на результаты измерений обусловлено тем, что при калибровке излучатель и гидрофон устанавливают в воде таким образом, что корпус гидрофона, крепления и штанги располагаются перпендикулярно прямой, проходящей через АЦ гидрофона и излучателя. Такая геометрия эксперимента обусловлена тем, что чувствительность гидрофона должна быть определена в опорном направлении, которое всегда перпендикулярно оси симметрии гидрофона.
Рассмотренный пример наглядно иллюстрирует причину, по которой в современных стандартах [6, 7] вместо АЦ гидрофона используют понятие опорного центра – назначенная точка внутри или вблизи гидрофона, относительно которой определяют акустическую чувствительность. Опорный центр соответствует геометрическому центру гидрофона, если не указано иное. Рекомендаций по выбору опорного центра стандарты не приводят.
Отказ от использования экспериментальной зависимости звукового давления от расстояния для определения АЦ гидрофона не умаляет достоинств использования этой зависимости для решения других задач, например, проверки условий свободного поля. В [8, 9] показана возможность использовать экспериментальную зависимость $p\left( r \right)$ для восстановления пространственного распределения окружающих гидрофон источников рассеяния звука с целью оценки их параметров, уточнения эффективного размера гидрофона, и, как следствие, уменьшения погрешности калибровки.
Расстояние между геометрическими центрами активных элементов излучателя и приемника в подводном положении можно принять равным расстоянию, рассчитанному по временной задержке принимаемого импульса, увеличенному на сумму радиусов излучателя и приемника [10]. Такой подход обеспечивает достаточную точность измерения модуля чувствительности гидрофона. Ситуация изменилась, когда потребовалось измерять фазочастотную характеристику (ФЧХ) чувствительности гидрофона. Как показано в [11], минимально-фазовую часть ФЧХ (МФЧХ) гидрофона можно получить преобразованием Гильберта его измеренной амплитудно-частотной характеристики (АЧХ). МФЧХ учитывает влияние дифракции звука, резонансные свойства гидрофона и равна его ФЧХ с точностью до набега фазы при распространении звуковой волны на расстояние, равное радиусу активного элемента гидрофона. В [11] представлены результаты для гидрофонов с активными элементами сферической и цилиндрической формы, получивших наибольшее распространение в качестве измерительных. В настоящее время этот прием не получил распространения и требует обсуждения в кругу специалистов.
Стандарт МЭК рекомендует выполнять калибровку методом взаимности, при этом в формулу чувствительности входят комплексные величины. Рассмотренный выше эксперимент показывает, что для измерения АЧХ гидрофона в качестве опорного центра можно использовать геометрический центр активного элемента. В то же время стандарт не указывает, как выбирать опорный центр для измерений ФЧХ. В работе [1] сделана попытка определить АЦ для пульсирующей сферы радиуса $a$, используя ее фазовую характеристику. Рассмотрены два подхода, на основе фазовой и групповой скорости звука. В первом случае смещение АЦ относительно начала отсчета расстояния вычисляют по формуле:
(2)
${{\Delta }}r = \frac{1}{k}{\text{arctg}}\left( {\frac{{{\text{Im}}\left\{ {\frac{{p\left( r \right)}}{{jU{{e}^{{j\left( {{{\omega }}t - kr} \right)}}}}}} \right\}}}{{{\text{Re}}\left\{ {\frac{{p\left( r \right)}}{{jU{{e}^{{j\left( {{{\omega }}t - kr} \right)}}}}}} \right\}}}} \right) = a - \frac{1}{k}{\text{arctg}}\left( {ka} \right),$(3)
${{\Delta }}r = \frac{\partial }{{\partial k}}{\text{arctg}}\left. {\left[ {\frac{{{\text{Im}}\left\{ {\frac{{p\left( r \right)}}{{jU{{e}^{{j\left( {{{\omega }}t - kr} \right)}}}}}} \right\}}}{{{\text{Re}}\left\{ {\frac{{p\left( r \right)}}{{jU{{e}^{{j\left( {{{\omega }}t - kr} \right)}}}}}} \right\}}}} \right.} \right] = a - \frac{a}{{1 + {{{\left( {ka} \right)}}^{2}}}},$Обратим внимание: положение АЦ, рассчитанное по формулам (2) и (3), совпадает с АЦ, рассчитанным по зависимости ${{\left| {p\left( r \right)} \right|}^{{ - 1}}}$ (центр сферы), только на очень низких частотах. С увеличением частоты АЦ удаляются от центра к поверхности сферы, причем на существенно разные расстояния. В силу симметрии пульсирующей сферы АЦ, рассчитанные для фазовой и групповой скорости звука, образуют сферические поверхности, асимптотически сжимающиеся в точку при стремлении частоты к нулю.
Полученный результат противоречит широко используемому методу комплексной калибровки гидрофона с размещением преобразователей по схеме Люкера–Ван Бюрена [6, 12]. Если пользоваться формулами (2) и (3), расстояние между излучателем и обратимым преобразователем не будет равно сумме расстояний между излучателем и гидрофоном и обратимым преобразователем и гидрофоном. При рассмотрении распространения звуковой волны в свободном пространстве принято считать, что фазовая и групповая скорости звука совпадают, тем более удивительно, что формулы дают разные результаты.
Ситуация исправляется, если в эквивалентном источнике, использованном в [1], учесть дифракцию на сфере не только по амплитуде, но и для расчета начальной фазы опорного сигнала $~U{{e}^{{j\left( {{{\omega }}t - kr - {\text{arctg}}\left( {ka} \right)} \right)}}}$. В этом случае все рассмотренные формулы оценки положения АЦ дают одинаковый результат – центр сферы. Таким образом, корректная замена сферы, пульсирующей в безграничном пространстве, эквивалентным точечным источником (АЦ), возможна, если в формуле эквивалентного источника учтен комплексный коэффициент дифракции, а сам источник помещен в центр сферы.
Далее будем использовать как понятие волнового фронта – границы раздела возмущенной и невозмущенной среды, так и понятие волновой поверхности – поверхности равных фаз. Под АЦ пульсирующей сферы по амплитуде и фазе будем понимать ее геометрический центр, под расстоянием дальнего поля – расстояния, на которых кривизна волновой поверхности на размере приемника пренебрежимо мала.
Если пульсирующую сферу поместить внутрь водонепроницаемой сферической оболочки так, что геометрические центры обеих сфер совпадают, то у получившегося “идеального” излучателя волновой фронт и диаграммы направленности по амплитуде и фазе (волновая поверхность) будут сферами с центрами в АЦ пульсирующей сферы, который совпадает с геометрическим центром излучателя. В ситуации, когда центры сфер не совпадают (пульсирующая сфера смещена относительно оболочки) проблема определения АЦ решается достаточно просто, поскольку волновой фронт и волновая поверхность остаются сферами с центрами в одной и той же точке. Например, нескольких точек диаграммы направленности по фазе, полученной относительно геометрического центра оболочки, достаточно, чтобы определить положение АЦ такого излучателя.
Для реального излучателя ситуация усложняется. Сферический активный элемент имеет как минимум одно отверстие для сигнального провода, цилиндрический – часто набран из отдельных таблеток. Даже если форма чувствительного элемента практически идеальна, неоднородность материалов и несовершенство технологии изготовления приводят к возникновению направленных свойств, иногда весьма заметных. Отличия характеристики направленности от круговой становятся причиной того, что звуковую волну нельзя считать однородной, волновые поверхности равных амплитуд и равных фаз отличаются от сферических и маскируют смещения АЦ при определении его положения акустическим методом.
Если в соответствии с рекомендациями [6, 12] при калибровке с размещением преобразователей по схеме Люкера–Ван Бюрена обеспечивать неизменность положения геометрического центра активного элемента калибруемого гидрофона, то ФЧХ гидрофона будет измерена для его АЦ. Этого пытаются добиться, используя сложные прецизионные системы 3D позиционирования по лучу лазера. Но по лучу лазера можно позиционировать только контур оболочки, в то время как положение собственно активного элемента, скрытого непрозрачным влагонепроницаемым покрытием, остается неизвестным. Для определения положения активного элемента приходится использовать специальные методы, вплоть до рентгена [13, 14], потому что активный элемент нередко смещен относительно оси симметрии гидрофона, т.е. АЦ не совпадает с геометрическим центром оболочки. Покрытие активного элемента затрудняет возможность обнаружить и измерить смещение АЦ, следствием которого могут быть значительные погрешности фазовой калибровки [13, 14].
Покажем, что в рамках стандартизованной измерительной процедуры метода взаимности эксперимент можно построить так, чтобы извлечь дополнительную информацию для определения положения АЦ с точностью, достаточной для измерения ФЧХ гидрофона.
ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ АКУСТИЧЕСКОГО ЦЕНТРА ГИДРОФОНА
Для поиска экспериментального способа определения АЦ обратимся к выражению для звукового давления $\dot {P}\left( {r,{{\beta }}} \right)$, создаваемого источником с чувствительностью на излучение ${{\dot {S}}_{{\text{И}}}}\left( {{\beta }} \right)$ в точке наблюдения, расположенной в дальнем поле источника на расстоянии r от его геометрического центра:
(4)
$\dot {P}\left( {r,{{\beta }}} \right) = \frac{{\left| {{{{\dot {S}}}_{{\text{И}}}}\left( {{\beta }} \right)} \right|}}{r}{{e}^{{ - j(kr - {\text{arg}}\left( {{{{\dot {S}}}_{{\text{И}}}}\left( {{\beta }} \right)} \right)}}}.$В формуле (4) ток возбуждения излучателя в целях сокращения записи принят равным единице, направленные свойства излучателя учтены зависимостью чувствительности на излучение от угла ${{\beta }}$.
О волновой поверхности будем судить по фазовой диаграмме направленности источника звука, о волновом фронте – по времени распространения звуковой волны на расстояние r. Как следует из формулы (4), фаза звукового давления содержит две компоненты. Первая зависит от направления излучения (характеристики направленности излучателя по фазе), вторая – от расстояния до АЦ. Различить эти компоненты с помощью прямых измерений фазы выходного сигнала приемного гидрофона невозможно. В свою очередь, волновой фронт не зависит от характеристики направленности излучателя и определяется только временем распространения звуковой волны и групповой скоростью звука.
Чтобы продемонстрировать изложенное, был выполнен эксперимент с излучателем, имеющим выраженные диаграммы направленности по амплитуде и фазе на частоте 150 кГц, изображенные на рис. 2а и 2б. Положение геометрического центра излучателя юстировали по лучу лазера. В качестве опорного сигнала для измерения фаз использовали ток возбуждения излучателя. Излучатель последовательно возбуждали синусоидальным и квадратурно дополняющим его косинусоидальным тональными импульсами, разделяя излучение паузами на реверберацию в звукомерном устройстве [15, 16]. Регистрировали ток возбуждения и напряжение на выходе приемного гидрофона и из них образовывали аналитические сигналы тока и напряжения. Зависимости от времени модуля и аргумента результата деления аналитического сигнала напряжения на аналитический сигнал тока описывают процессы установления амплитуды и фазы выходного сигнала гидрофона. Типичные зависимости установления изображены на рис. 3.
Рис. 2.
Характеристики направленности излучателя на частоте 150 Гц: (а) – по амплитуде, (б) – по фазе.
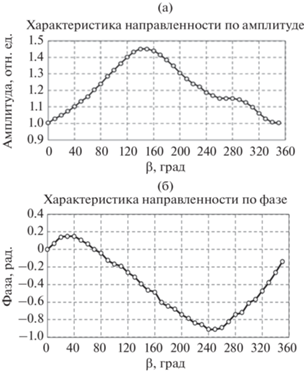
Рис. 3.
Установление (а) – фазы и (б) – амплитуды сигнала на выходе приемника. Участок 1 – набег фазы при пробеге волны от излучателя к приемнику, участок 2 – фазовый сдвиг выходного напряжения приемника относительно тока возбуждения излучателя, τ – задержка звуковой волны в точке наблюдения.

По зависимости на рис. 2а можно судить о направленности излучателя по амплитуде, поскольку результат измерений практически не зависит от смещения АЦ относительно геометрического центра гидрофона, которое можно считать пренебрежимо малым в сравнении с расстоянием до точки наблюдения. В отношении зависимости на рис. 2б этого сказать нельзя. Такое же смещение АЦ обуславливает значительные искажения характеристики направленности по фазе на высоких частотах вне зависимости от расстояния до точки наблюдения. Фазовая зависимость представлена в декартовых координатах для наглядности ее сравнения с амплитудной характеристикой. Из поведения зависимости на рис. 2б не просматривается ее связь с зависимостью на рис. 2а. В то же время выраженная цикличность фазовой зависимости дает основание предполагать, что влияние смещения АЦ превалирует над зависимостью ${\text{arg}}\left( {{{{\dot {S}}}_{{\text{И}}}}\left( {{\beta }} \right)} \right)$.
Рассмотрим способ, позволяющий в этих условиях выделить фазовую компоненту, связанную со смещением АЦ относительно геометрического центра гидрофона.
При измерениях характеристик направленности и при измерениях методом взаимности для оценки амплитуды и фазы используют конечную (установившуюся) часть модуля и аргумента принятого сигнала. При этом остается неиспользованной информация, содержащаяся в его начальной части, а именно – положение переднего фронта. При повороте излучателя вокруг геометрического центра из-за смещения АЦ относительно геометрического центра расстояние $r$ между излучателем и точкой наблюдения будет изменяться в зависимости от угла поворота ${{\beta }}$ на величину ${{\Delta }}r\left( {{\beta }} \right)$, что приведет к соответствующему изменению набега фазы на ${{\Delta \varphi }}\left( {{\beta }} \right) = k{{\Delta }}r\left( {{\beta }} \right)$.
Для дальнейших рассуждений нас будет интересовать не собственно набег фазы при пробеге волны от излучателя в точку приема, а изменение набега фазы ${{\Delta \varphi }}\left( {{\beta }} \right)~$ в зависимости от угла ${{\beta }}$ относительно опорного направления излучателя ${{\beta }} = 0^\circ $.
Изменение набега фазы можно оценить как по зависимости на рис. 3а, так и по зависимости на рис. 3б. Выбор той или иной зависимости определяется условиями эксперимента: крутизной фронта амплитудной зависимости, отношением сигнал/шум, удобством выбора характерной точки фронта для измерения задержки ${{\tau }}$, и т.п. В обоих случаях желательно выбирать характерную точку ближе к началу переходного процесса, чтобы уменьшить влияние переходных процессов в излучателе и приемнике.
В эксперименте по измерению диаграмм направленности излучателя в соответствии с изложенными выше рекомендациями была также измерена зависимость ${{\Delta \varphi }}\left( {{\beta }} \right)$, которая представлена на рис. 4 рядом 1.

Для оценки смещения АЦ важна зависимость ${{\Delta }}r\left( {{\beta }} \right)$. Чтобы показать, насколько значительный вклад дает смещение АЦ в фазовую характеристику, на рис. 4 представлены не зависимости ${{\Delta }}r\left( {{\beta }} \right)$ в миллиметрах, а зависимости ${{\Delta \varphi }}\left( {{\beta }} \right)$ в единицах измерения угла. Сравнение зависимости на рис. 2б и ряда 1 на рис. 4 обнаруживает явную схожесть их поведения, а размах значений ряда 1 говорит о значительном вкладе смещений АЦ в погрешность измеренной диаграммы направленности по фазе. На рис. 5 представлена зависимость, полученная вычитанием ряда 1 из зависимости на рис. 2б.

В отличие от зависимости на рис. 2б поведение полученной зависимости обнаруживает ее явную связь с характеристикой направленности по амплитуде. Экстремуму характеристики направленности по амплитуде соответствует экстремум характеристики по фазе, подъему характеристики по амплитуде соответствует завал характеристики по фазе и наоборот.
Операцию вычитания зависимостей, результат которой представлен на рис. 5, можно рассматривать как перемещение неподвижной в эксперименте точки (точки отсчета расстояния) из геометрического центра контура активного элемента в геометрический центр собственно активного элемента. При таком перемещении волновой фронт приобретает форму, близкую к сфере с центром в АЦ излучателя, и позволяет определить характеристику направленности по фазе для АЦ. Используя соотношение ${{\Delta }}r\left( {{\beta }} \right) = {{{{\Delta \varphi }}\left( {{\beta }} \right)} \mathord{\left/ {\vphantom {{{{\Delta \varphi }}\left( {{\beta }} \right)} k}} \right. \kern-0em} k}$, удается с приемлемой точностью рассчитать координаты АЦ.
В эксперименте геометрический центр излучателя оставался неподвижным. Изменение набега фазы при развороте излучателя из опорного положения на 180° составило приблизительно 0.17 рад, и 0.96 рад при повороте на 180° из положения 90°. Как нетрудно проверить, такие набеги фазы свидетельствуют о смещении АЦ относительно геометрического центра контура активного элемента примерно на 0.1 мм в направлении, противоположном опорному, и на 0.8 мм в направлении 270° относительно опорного. Рядом 2 на рис. 4 продемонстрирована зависимость изменения набега фазы, рассчитанная для полученных оценок координат АЦ.
При определении АЦ гидрофона предпочтительно применять описанный способ, и эксперимент с направленным излучателем показал, что использование волновой поверхности в этом случае приводит к неприемлемым погрешностям. Более надежные результаты дает использование волнового фронта, дополнительное преимущество – отсутствие необходимости проверки сферичности волновой поверхности. При сличениях результатов калибровок по фазе представляется разумным использовать определение АЦ, опирающееся на понятие волнового фронта.
В формулировках определения АЦ речь идет об источнике звука, но не о приемнике. Для обратимого преобразователя положение АЦ не зависит от того, является ли он источником или приемником. Вопрос, как поступать, если необходимо определить положение АЦ необратимого приемника звука (например, гидрофон с предусилителем), оставался открытым. Нетрудно убедиться, что если в описанном эксперименте излучатель и гидрофон-приемник поменять местами и выполнить измерения диаграммы направленности гидрофона на прием, то АЦ приемника будет находиться в центре окружности равных временных задержек принимаемых гидрофоном сигналов излучателя.
Рассмотренный подход к определению АЦ гидрофона позволил усовершенствовать процедуру калибровки при размещении преобразователей по схеме Люкера–Ван Бюрена и был опробован для фазовой калибровки приемников подводного звука методом взаимности [15, 17].
ЭКВИВАЛЕНТНЫЙ РАДИУС ПРЕОБРАЗОВАТЕЛЯ
В соответствии с определением чувствительность гидрофона связывает напряжение на выходе гидрофона и звуковое давление в точке расположения АЦ гидрофона в звуковом поле в отсутствие гидрофона. Выходной сигнал гидрофона опережает по времени приход звуковой волны в точку расположения его АЦ. ФЧХ гидрофона можно получить, добавив к МФЧХ компоненту $ - k{{\tilde {a}}_{H}}$ [11, 12], соответствующую этому опережению.
При рассмотрении теоретических моделей гидрофона в виде жесткой пульсирующей сферы или цилиндра параметр ${{\tilde {a}}_{H}}$ принимают равным геометрическому радиусу активного элемента ${{a}_{H}}$ [1, 4, 6]. Для реального гидрофона ${{\tilde {a}}_{H}}$ может отличаться от геометрического радиуса ${{a}_{H}}$.
В числе причин, вызывающих этот эффект, можно назвать конечную толщину покрытия и стенок активного элемента, различную скорость распространения звука в материалах покрытия и активного элемента, отличие этих скоростей от скорости звука в среде, окружающей преобразователь, и т.п. Вследствие этого для реального преобразователя параметр ${{\tilde {a}}_{H}}$ следует понимать как акустический эквивалент геометрического радиуса его активного элемента.
Опираясь на понятие волнового фронта, можно определить координаты АЦ, что, в свою очередь, позволяет оценить значение параметра ${{\tilde {a}}_{H}}$. Как и в рассмотренном выше эксперименте, время распространения звуковой волны от излучателя к приемнику ${{{{\tau }}}_{{P - H}}}$ будем определять по задержке выходного сигнала приемника относительно сигнала возбуждения излучателя. Зная координаты АЦ относительно центров геометрических контуров активных элементов излучателя и приемника, нетрудно рассчитать расстояние ${{\tilde {r}}_{{P - H}}}$ между АЦ. Соответственно, ${{{{\tilde {\tau }}}}_{{P - H}}} = {{\left( {{{{\tilde {r}}}_{{P - H}}}} \right)} \mathord{\left/ {\vphantom {{\left( {{{{\tilde {r}}}_{{P - H}}}} \right)} c}} \right. \kern-0em} c}$ – время распространения звуковой волны в свободном поле на расстояние между точками расположения АЦ преобразователей. Для идеальных излучателя и приемника разность времен ${{\Delta }}{{{{\tilde {\tau }}}}_{{P - H}}} = {{{{\tilde {\tau }}}}_{{P - H}}} - {{{{\tau }}}_{{P - H}}}$ – время пробега звуковой волны на расстояние, равное сумме радиусов их активных элементов ${{a}_{P}}$ + ${{a}_{H}}$. Для реальных преобразователей это расстояние примем равным сумме параметров ${{\tilde {a}}_{P}}$ + ${{\tilde {a}}_{H}}$.
Обозначим через ${{{{\tilde {\tau }}}}_{P}}$ и ${{{{\tilde {\tau }}}}_{H}}$ времена пробега звуковой волны при ее распространении в свободном поле на расстояния ${{\tilde {a}}_{P}}$ и ${{\tilde {a}}_{H}}$ соответственно. Если при измерениях по методу взаимности для трех пар излучатель–гидрофон, излучатель–обратимый преобразователь и обратимый преобразователь–гидрофон определить разности времен $\Delta {{\tilde {\tau }}_{{P - H}}} = {{\tilde {\tau }}_{P}} + {{\tilde {\tau }}_{H}}$, $\Delta {{\tilde {\tau }}_{{P - T}}} = {{\tilde {\tau }}_{P}} + {{\tilde {\tau }}_{T}}$ и $\Delta {{\tilde {\tau }}_{{T - H}}} = {{\tilde {\tau }}_{T}} + {{\tilde {\tau }}_{H}}$, то этих данных достаточно, чтобы определить времена пробега ${{{{\tilde {\tau }}}}_{P}}$, ${{{{\tilde {\tau }}}}_{T}}$ и ${{{{\tilde {\tau }}}}_{H}}$:
Соответственно, значения параметров ${{\tilde {a}}_{P}}$, ${{\tilde {a}}_{T}}$ и ${{\tilde {a}}_{H}}$, которые назовем эквивалентными радиусами преобразователей, получим по формулам:
ЗАКЛЮЧЕНИЕ
Точное положение АЦ важно знать для определения фазочастотных характеристик измерительных каналов векторно-скалярного приемника [18], при компоновке многоэлементных фазированных решеток различного назначения [19, 20], излучателей с выраженной характеристикой направленности. Авторы не стремились сформулировать новое определение АЦ гидрофона. Целью авторов был достаточно простой в реализации метод экспериментального определения положения АЦ гидрофона для расчета расстояния, используемого в формуле измерений методом взаимности. Выработка формулировки определения – предмет согласования подходов, обеспечивающих бóльшую точность при калибровке гидрофонов. Бессмысленно давать теоретически абсолютно верную формулировку, которая приводит к разночтениям при ее использовании для целей измерений. То, что хорошо для микрофона, может оказаться неприемлемым для гидрофона.
В воздушной акустике точно определять положение АЦ потребовала достигнутая точность калибровки микрофонов. Положение АЦ микрофона зависит от многих факторов, в числе которых: конструкция микрофона, направление распространения волны, расстояние между источником и приемником звука [1, 5]. Точность калибровки микрофона гораздо выше точности калибровки измерительного гидрофона. При этом наиболее точные результаты определения положения АЦ микрофона удается получать по зависимости звукового давления от расстояния, т.е. способом, малопригодным для гидрофона. Причина в том, что у измерительного микрофона геометрическая форма (цилиндр) и размеры жестко стандартизованы. Стандартизовано опорное направление и даже диапазон расстояний, на которых устанавливают микрофон при калибровке [2]. Предписано, что крепление должно быть протяженным цилиндром, диаметр которого равен номинальному диаметру микрофона [21]. При калибровке оси излучателя и приемника совмещают, поскольку именно ось симметрии микрофона выбрана в качестве его опорного направления. При таком расположении влияние рассеяния звука элементами корпуса микрофона и его креплении на звуковое поле минимально [5].
В подводной акустике ни измерительный, ни эталонный гидрофон не стандартизованы. Даже на международных сличениях высокого ранга артефакты (опорные гидрофоны) лаборатория-пилот подбирает исходя из своих предпочтений. Тем не менее, в результате “естественного отбора” определились конструктивные предпочтения – измерительный гидрофон имеет осесимметричную форму и активный элемент в форме сферы либо цилиндра.
При калибровке гидрофон и излучатель устанавливают вертикально, располагая оси симметрии преобразователей и их креплений перпендикулярно падающей звуковой волне. Такое расположение обуславливает значительное влияние на звуковое поле рассеяния звука на корпусах преобразователей и их креплениях.
До тех пор, пока при калибровке измеряли только АЧХ гидрофона, можно было говорить не об акустическом, а об опорном центре, в качестве которого принимают геометрический центр контура активного элемента. Обычно смещения АЦ относительно выбранной таким образом опорной точки достаточно малы, чтобы влиять на результат измерения чувствительности гидрофона по амплитуде, однако влияют на результат измерения фазовой характеристики чувствительности.
В то же время у схемы размещения преобразователей при калибровке гидрофона имеются и преимущества – возможность вращать гидрофон относительно оси симметрии. Это позволяет получать дополнительную информацию, достаточную, чтобы оценить координаты АЦ. Эти возможности и были использованы в описанном эксперименте.
Список литературы
Jacobsen F., Barrera-Figueroa S., Rasmussen K. A note on the concept of acoustic center // J. Acoust. Soc. Am. 2004. V. 115. P. 1468–1473.
ГОСТ Р МЭК 61094-3-2001 Микрофоны измерительные. Первичный метод градуировки по свободному полю лабораторных эталонных микрофонов методом взаимности.
МЭК 60050-801-2021 Международный электротехнический словарь. Глава 801. Акустика и электроакустика. Изменение 2.
МЭК 60565-1977: Гидрофоны. Градуировка.
Barrera Figueroa S., Rasmussen K., Jacobsen F. The acoustic center of laboratory standard microphones // J. Acoust. Soc. Am. 2006. V. 120(5). P. 2668–2675.
IEC 60565-1:2020 Underwater acoustics – Hydrophones – Calibration of hydrophones – Part 1: Procedures for free-field calibration of hydrophones.
IEC 60500:2017 Underwater acoustics – Hydrophones ‑ Properties of hydrophones in the frequency range 1 Hz to 500 kHz.
Исаев А.Е., Матвеев А.Н., Смелов В.А., Щелкунов А.И. Снижение погрешности градуировки измерительных гидрофонов по полю методом взаимности в гидроакустическом бассейне // Акуст. журн. 2004. Т. 50. № 5. С. 628–637.
Исаев А.Е. Градуировка гидрофона при наличии отражающих элементов с использованием согласованной пространственной фильтрации // Акуст. журн. 2008. Т. 54. № 3. С. 418–425.
Исаев А.Е. Точная градуировка приемников звукового давления в водной среде в условиях свободного поля. Менделеево: ФГУП “ВНИИФТРИ”, 2008. 369 с.
Исаев А.Е., Хатамтаев Б.И. Определение фазочастотной характеристики гидрофона по амплитудно-частотной характеристике // Измерительная техника. 2021. № 7. С. 48–53.
Luker L.D., Van Buren A.L. Phase calibration of hydrophones // J. Acoust. Soc. Am. 1981. V. 70. P. 516–519.
Hayman G., Robinson S. Phase calibration of hydrophones by the free-field reciprocity method // Proc. 11th Europ. Conf. Underwater Acoustics. Edinburgh, 2012. P. 1437–1444.
Hayman G., Wang Y., Robinson S.P. A comparison of two methods for phase response calibration of hydrophones in the frequency range 10–400 kHz // J. Acoust. Soc. Am. 2013. V. 133(2). P. 750–759.
Исаев А.Е., Матвеев А.Н., Поликарпов А.М., Щерблюк Н.Г. Измерение фазочастотной характеристики чувствительности гидрофона по полю методом взаимности // Измерительная техника. 2013. № 6. С. 56–59.
Исаев А.Е. Уменьшение влияния переходного процесса при градуировке гидрофонов по полю на низких частотах с использованием квадратурно-дополненных гармонических сигналов // Измерительная техника. 2010. № 4. С. 20–24.
Исаев А.Е., Матвеев А.Н., Некрич Г.С., Поликарпов А.М. Комплексная градуировка приёмника градиента давления с использованием процедуры метода взаимности // Акуст. журн. 2014. Т. 60. № 1. С. 48.
Кузнецов Г.Н., Пудовкин А.А., Субботкин А.О. Уравнения для расчета амплитудно- и фазочастотных характеристик векторно-скалярного приемника типа “триполь” с временной задержкой сигнала монополя // Акуст. журн. 2021. Т. 67. № 4. С. 440–449.
Базулин Е.Г., Соколов Д.М. Восстановление ультразвуковых изображений отражателей по неполным данным методом распознавания со сжатием // Акуст. журн. 2019. Т. 65. № 4. С. 520–532.
Росницкий П.Б., Сапожников О.А., Гаврилов Л.Р., Хохлова В.А. Метод создания абсолютно плотных фазированных решеток для неинвазивной ультразвуковой хирургии с контролем степени нерегулярности расположения элементов // Акуст. журн. 2020. Т. 66. № 4. С. 366–376.
МЭК 61094-1:2000 Микрофоны измерительные. Часть 1. Технические требования для лабораторных эталонных микрофонов.
Дополнительные материалы отсутствуют.
Инструменты
Акустический журнал