

Акустический журнал, 2022, T. 68, № 5, стр. 520-529
Применение векторно-скалярного приемника для анализа направленных свойств поля
С. Г. Михайлов *
Институт общей физики им. А.М. Прохорова РАН
119991 Москва, ул. Вавилова 38, Россия
* E-mail: s.mikhailov@mail.ru
Поступила в редакцию 27.04.2022
После доработки 24.05.2022
Принята к публикации 26.05.2022
- EDN: CCUMJP
- DOI: 10.31857/S0320791922050070
Аннотация
Исследуется возможность изучения направленных свойств поля с помощью одиночного комбинированного векторно-скалярного приемника. Рассматривается математическая модель поля на основе пуассоновского процесса. Аналитически показана связь математического ожидания углового распределения модуля вектора Умова и плотности вероятности его аргумента (фазы) с угловой плотностью и угловой плотностью вероятности акустического поля в предельных случаях редких импульсов и гауссова приближения. На основе численного расчета анализируется эволюция указанных функций при изменении ширины частотной полосы анализа.
ВВЕДЕНИЕ
Направленные свойства акустического поля обычно характеризуются угловым спектром. Угловой спектр является одной из важнейших характеристик поля и широко применяется при прогнозировании работоспособности различных гидроакустических устройств. Возможности устройства по угловому разрешению нескольких источников или выделению сосредоточенного источника на фоне помех тесно связаны с решением таких важных технических задач, как обнаружение и пеленгование. Для моделирования углового спектра используются как теоретические модели [1, 2], так и аппроксимации экспериментальных данных [3]. Для накопления экспериментальных данных, их обобщения и последующего уточнения представлений о процессах, формирующих шумовые поля, необходимо проводить исследования направленности морских (океанских) шумов в различных диапазонах частот. Экспериментально в условиях открытого моря оценка углового спектра обычно выполняется с помощью протяженных многоэлементных узконаправленных антенн [4–8], имеющих размер несколько десятков длин волн. Большие габариты этих устройств существенно усложняют проведение экспериментов. Кроме того, для многоэлементных антенн характерно значительное расширение характеристики направленности с уменьшением частоты [5], что затрудняет анализ направленных свойств поля в этом диапазоне.
Комбинированный векторно-скалярный приемник (ВСП) [9] в отличие от протяженной антенны имеет размер существенно меньше длины волны и поэтому может входить в состав компактных средств исследования океана. ВСП включает в себя ненаправленный приемник давления (скалярная часть) и два или три приемных канала, имеющих взаимно перпендикулярные дипольные характеристики направленности (векторная часть). ВСП обладает следующей важной особенностью: характеристики направленности канала давления и каналов его векторной части близки к теоретическим и практически неизменны в широком диапазоне частот, доходящем до двух–трех декад. Это свойство позволяет анализировать широкополосные сигналы, принятые приемником, полагая характеристики направленности всех его каналов равными теоретическим и не зависящими от частоты. Будем также считать, что фазовые центры всех приемных каналов совпадают, а выходные сигналы каналов векторной части пропорциональны компонентам колебательной скорости.
ВСП применяется для решения различных гидроакустических задач [10]. Используемые при этом методы часто именуются векторно-фазовыми. Теоретическое изучение статистических свойств поля [11] и пеленгования [12] с помощью комбинированных приемников, выполненное для гауссовых (нормальных) полей, показало, что ВСП обладает весьма ограниченными возможностями по исследованию направленных свойств поля и разрешению локальных источников. Однако, известны экспериментальные данные ([10], с. 221), показывающие, что с помощью ВСП возможно разрешение, по крайней мере, двух источников. Это указывает на необходимость углубления понимания возможностей ВСП, что требует не только расширения представлений о статистических свойствах гауссова поля, но и применения модели морского шума, обладающей более широкими возможностями по варьированию свойств моделируемого поля.
МОДЕЛЬ ШУМОВОГО ПОЛЯ
В традиционных моделях [1, 2, 13] шумовое поле рассматривается как результат сложения гармонических волн, излучаемых многочисленными точечными монопольными, дипольными или иными источниками с равными среднеквадратическими интенсивностями, но со случайными фазами. Источники равномерно располагаются в объеме, на сфере, в конусе, на плоскости или прямой. Такие модели хорошо подходят для анализа свойств гауссовых полей и находящихся в них устройств в узкой полосе частот. Для исследования полей, формируемых широкополосными сигналами, требуется иной подход. Пример такого подхода изложен в [12]. Он основан на представлении, что события, приводящие к излучению шумов, происходят независимо друг от друга в различных точках водной толщи или на ее поверхностях. Считается, что некоторые из этих событий порождаются сходными процессами и при этом излучаются близкие по форме импульсы. Такими процессами могут быть: падение капель, разрушение гребней волн, растрескивание и торошение льда, звуки, издаваемые животными одного вида, схлопывание кавитационных пузырьков, некоторые виды технических шумов и т.п. Общей особенностью перечисленных процессов является то, что они создают короткие звуковые импульсы. В рамках модели рассматриваются статистические свойства акустического поля, создаваемого в безграничном однородном и изотропном пространстве источниками, находящимися на окружности достаточно большого радиуса r, лежащей в плоскости xОy. Такое приближение допустимо, поскольку в [1] отмечалось, что корреляционные характеристики поля при определенных условиях будут одинаковыми как в случае объемной изотропной модели, так и при расположении точечных источников на поверхности сферы большого радиуса. Плоская двумерная модель выбрана для сокращения объема формул и может быть при необходимости преобразована в трехмерную.
Пусть поле формируется в результате последовательности событий, заключающихся в том, что в случайные моменты времени ${{t}_{i}}$ в точках, лежащих на окружности радиуса r под углом ${{\varphi }_{i}}$, $ - {{\pi }} \leqslant {{\varphi }_{i}} < {{\pi }}$, происходит кратковременный импульс, создающий в центре окружности изменение давления
Здесь r0 – единичный радиус, a и φ – независимые случайные величины, $g(\varphi )$ – неслучайная функция, $s(t)$ – ограниченный во времени импульс, $s(t) = 0$, если $t < {{ - {{\tau }}} \mathord{\left/ {\vphantom {{ - {{\tau }}} 2}} \right. \kern-0em} 2}$ и $t > {{{\tau }} \mathord{\left/ {\vphantom {{{\tau }} 2}} \right. \kern-0em} 2}$, τ – длительность импульса, с – скорость звука в среде. Соответствующее такому случайному процессу давление в центре окружности равно:
а компоненты колебательной скорости(1)
$P(t) = {{p}_{s}}(t),\,\,\,X(t) = \rho {\kern 1pt} c{{v}_{x}}(t),\,\,\,Y(t) = \rho {\kern 1pt} c{{v}_{y}}(t).$Рис. 1.
Схема формирования вектора Умова (а) – при отсутствии наложения импульсов и (б) – при наложении нескольких импульсов. Результирующий вектор I(t) показан утолщенным, $t{\kern 1pt} ' = t + {r \mathord{\left/ {\vphantom {r c}} \right. \kern-0em} c}$.

Согласно [12], если процесс (1) является пуассоновским, то его характеристическая функция имеет вид:
(2)
$\begin{gathered} \psi ({{u}_{1}},{{u}_{2}},{{u}_{3}}) = \exp \left( {q\int\limits_{ - \infty }^\infty {{{w}_{a}}(a)da} \int\limits_{ - \pi }^\pi {{{w}_{\varphi }}(\varphi )d\varphi } } \right. \times \\ \times \,\,\left. {\int\limits_{ - \infty }^\infty {\left\{ {\exp \left[ {i{\kern 1pt} a\sum\limits_{j = 1}^3 {{{g}_{j}}(\varphi )s(t)\,{{u}_{j}}} } \right] - 1} \right\}dt} } \right). \\ \end{gathered} $Здесь wa и wφ – плотности вероятности случайных величин ai и φi, а q – средняя частота появления импульсов, ${{g}_{1}}(\varphi ) = g(\varphi )$, ${{g}_{2}}(\varphi ) = - g(\varphi )\cos \varphi $ и ${{g}_{3}}(\varphi ) = - g(\varphi )\sin \varphi $. Соответствующие кумулянты равны:

Величина $n + k + l$ – порядок кумулянта. Кумулянты первого порядка – средние значения, второго – центральные моменты второго порядка, т.е. дисперсии и функции взаимной корреляции процессов P, X, Y. Следовательно, дисперсия пульсаций давления равна:
Здесь $\sigma _{a}^{2} = \int_{ - \infty }^\infty {{{a}^{2}}{{w}_{a}}(a)da} $, $\sigma _{s}^{2} = \int_{ - \infty }^\infty {{{s}^{2}}(t)dt} $. Аналогично вычисляются дисперсии компонент колебательной скорости:
Взаимная корреляционная функция компонент колебательной скорости дается формулой:
(3)
$\begin{gathered} {{R}_{{PX}}} = - q\sigma _{a}^{2}\sigma _{s}^{2}\int\limits_{ - \pi }^\pi {{{g}^{2}}(\varphi )\cos \varphi {{w}_{\varphi }}(\varphi ){\kern 1pt} d\varphi } , \\ {{R}_{{PY}}} = - q\sigma _{a}^{2}\sigma _{s}^{2}\int\limits_{ - \pi }^\pi {{{g}^{2}}(\varphi )\sin \varphi {\kern 1pt} {{w}_{\varphi }}(\varphi ){\kern 1pt} d\varphi } . \\ \end{gathered} $Из полученных формул видно, что дисперсии и взаимные корреляционные функции давления и колебательной скорости зависят только от функции $G(\varphi ) = q\sigma _{a}^{2}\sigma _{s}^{2}{{g}^{2}}(\varphi ){{w}_{\varphi }}(\varphi )$, которую назовем угловой плотностью поля. На зависимость функции G(φ) от угла влияет как относительная частота попадания импульсов в различные секторы углов (угловая плотность вероятности wφ(φ)), так и квадрат локальной амплитуды импульсов (функция g2(φ)). По влиянию на дисперсии и корреляционные функции эти факторы эквивалентны.
ВЕКТОР УМОВА
Анализируя движение энергии в волновых полях в упругой среде, Н.А. Умов пришел к выводу [13–15], что в каждый момент времени направление движения энергии задается вектором, который для жидкости в принятых здесь обозначениях имеет вид: ${\mathbf{J}}(t) = {{p}_{s}}(t){\mathbf{v}}(t)$, где ${\mathbf{v}}(t)$ – вектор колебательной скорости, в двумерном пространстве равный ${\mathbf{v}}(t) = {{v}_{x}}(t) + i{{v}_{y}}(t)$. Эта величина под названием вектор Умова (Умова–Пойнтинга) [10], а для аналитического сигнала в форме, указанной в [17], широко применяется в акустике, в том числе для статистического анализа полей [10–12].
Рассмотрим случайный процесс
отличающийся от вектора Умова только постоянным множителем. Далее вектором Умова для краткости будем называть процесс I(t). Его характеристическая функция равна:(5)
$\begin{gathered} {{\psi }_{I}}(u) = \exp \left( {q\int\limits_{ - \infty }^\infty {{{w}_{a}}(a)da} \int\limits_{ - \pi }^\pi {{{w}_{\varphi }}(\varphi )d\varphi } } \right. \times \\ \times \,\,\left. {\int\limits_{ - \infty }^\infty {\left\{ {\exp \left[ { - i{\kern 1pt} {{a}^{2}}{{g}^{2}}(\varphi ){{s}^{2}}(t)u{{e}^{{i\varphi }}}} \right] - 1} \right\}dt} } \right). \\ \end{gathered} $Соответствующий ей кумулянт первого порядка – математическое ожидание процесса I равно:

Иногда эту функцию называют потоком акустической мощности и возлагают на нее особые надежды в решении ряда задач [10, 18]. Однако, приведенное выражение показывает, что математические ожидания компонент вектора Умова M[Ix] и M[Iy] совпадают с взаимными корреляционными функциями давления и компонент колебательной скорости RPX и RPY. Как вытекает из формулы (3), эти функции полностью определяются первой гармоникой разложения угловой плотности в ряд Фурье по углу φ [12], и ожидание того, что с их помощью удастся получить полное описание направленных свойств поля, представляется необоснованным.
Более перспективно изучение свойств распределений, которые могут быть получены на основании мгновенных значений вектора Умова, описываемых его модулем I(t) = |I(t)| и аргументом (фазой) θ(t):
(6)
$\theta (t) = \left\{ \begin{gathered} {\text{arcctg}}\left[ {{{{{I}_{x}}(t)} \mathord{\left/ {\vphantom {{{{I}_{x}}(t)} {{{I}_{y}}(t)}}} \right. \kern-0em} {{{I}_{y}}(t)}}} \right],\,\,\,\,{{I}_{y}}(t) > 0, \hfill \\ 0,\,\,\,\,{{I}_{y}}(t) = 0,\,\,\,{{I}_{x}}(t) \ne 0, \hfill \\ {\text{arcctg}}\left[ {{{{{I}_{x}}(t)} \mathord{\left/ {\vphantom {{{{I}_{x}}(t)} {{{I}_{y}}(t)}}} \right. \kern-0em} {{{I}_{y}}(t)}}} \right] + \pi ,\,\,\,\,{{I}_{y}}(t) < 0, \hfill \\ \end{gathered} \right.$Следует заметить, что все приведенные соотношения выполняются независимо от величины произведения (интенсивности процесса) qτ, определяющего характер поля. При высокой интенсивности qτ $ \gg $ 1 в результате взаимного наложения большого числа импульсов процесс (1), как известно, приближается к нормальному [19]. В противоположном случае qτ $ \ll $ 1 будут наблюдаться отдельные импульсы почти без наложения. Различия в формировании вектора Умова в том и другом случае иллюстрирует рис. 1. Рассмотрим эти два предельных случая подробнее.
УГЛОВАЯ ПЛОТНОСТЬ МОДУЛЯ И ПЛОТНОСТЬ ВЕРОЯТНОСТИ АРГУМЕНТА ВЕКТОРА УМОВА В СЛУЧАЕ РЕДКИХ ИМПУЛЬСОВ
Когда средняя частота появления импульсов низкая, а сами импульсы короткие: qτ $ \ll $ 1, вероятность наложения следующих друг за другом импульсов мала. Для упрощения анализа совсем исключим такие события из рассмотрения. При этом условии в течение времени прохождения через точку начала координат i-го импульса процесса (1) значение аргумента вектора Умова будет равно: θi = φi + π.
Выделим малую дугу (θ', θ' + Δθ) такую, чтобы выполнялось условие |1 – θ'/(θ' + Δθ)| $ \ll $ 1, что делает возможным только малое изменение значений функции exp(θ), когда θ' ≤ θ < θ' + Δθ. Из исходного процесса (1) выберем подпоследовательность, для которой θ' ≤ θi < θ' + Δθ. Так как в рассматриваемом случае углы θ и φ связаны однозначно: φi = θi – π, вероятность попадания i-го импульса в указанный интервал и его включения в новую подпоследовательность равна:
(7)
$F = \int\limits_{{{\theta '}} - {{\pi }}}^{{{\theta }}{\kern 1pt} {\text{'}} + \Delta {{\theta }} - {{\pi }}} {{{w}_{\varphi }}(\varphi )d\varphi } ,$Найдем математическое ожидание вектора Умова ${{{\mathbf{I}}}_{{\Delta {{\theta }}}}}(t) = {{P}_{{\Delta {{\theta }}}}}(t){{{\mathbf{V}}}_{{\Delta {{\theta }}}}}(t)$, порождаемого источниками, находящимися на выделенной дуге. Характеристическая функция процесса ${{{\mathbf{I}}}_{{\Delta {{\theta }}}}}(t)$ отличается от (4) только пределами интегрирования по φ и равна:
Соответствующее ей математическое ожидание равно:
Если произведение ${{g}^{2}}(\varphi )\exp (i\varphi )$ мало изменяется при θ' – π ≤ φ ≤ θ' + Δθ – π, то
Если произведение ${{g}^{2}}(\varphi )w(\varphi )$ является непрерывной функцией угла $\varphi $, то существует предел отношения M[IΔθ]/Δθ при уменьшении длины дуги Δθ, равный:
Заметим, что модуль полученного выражения:
(8)
$\begin{gathered} {{U}_{r}}({{\theta }}) = \mathop {\lim }\limits_{\Delta {{\theta }} \to 0} \left| {{{{\text{M}}[{{{\mathbf{I}}}_{{\Delta {{\theta }}}}}]} \mathord{\left/ {\vphantom {{{\text{M}}[{{{\mathbf{I}}}_{{\Delta {{\theta }}}}}]} {\Delta {{\theta }}}}} \right. \kern-0em} {\Delta {{\theta }}}}} \right| = \\ = q\sigma _{а}^{2}\sigma _{s}^{2}{\kern 1pt} {{g}^{2}}({{\theta }} - {{\pi )}}{{w}_{\varphi }}({{\theta }} - {{\pi )}} \\ \end{gathered} $(9)
$\Gamma (\varphi ) = {{G(\varphi )} \mathord{\left/ {\vphantom {{G(\varphi )} {\int\limits_{ - {{\pi }}}^{{\pi }} {G(\varphi )d\varphi } }}} \right. \kern-0em} {\int\limits_{ - {{\pi }}}^{{\pi }} {G(\varphi )d\varphi } }}.$Заметим также, что при условии непрерывности функции wφ(φ) из (7) вытекает, что пределом отношения F/Δθ при уменьшении дуги Δθ является угловая плотность вероятности wφ(θ – π):
Таким образом, в случае редкого процесса вычисление угловых распределений модуля и аргумента вектора Умова позволяет получить достоверные оценки угловой плотности и угловой плотности вероятности поля.
УГЛОВАЯ ПЛОТНОСТЬ МОДУЛЯ И ПЛОТНОСТЬ ВЕРОЯТНОСТИ АРГУМЕНТА ВЕКТОРА УМОВА В ГАУССОВОМ ПОЛЕ
В [12] найдены выражения для совместной плотности вероятности модуля и аргумента вектора Умова и плотности вероятности его аргумента (фазы) для случайного процесса вида (1). Совместная плотность вероятности модуля и аргумента вектора Умова после замены функции Макдональда порядка ½ ее выражением через элементарные функции ([20], ф-ла 8.469.3) принимает вид:
(10)
${{w}_{g}}(I,\theta ) = \frac{1}{{2\pi \sqrt \alpha {\kern 1pt} }}\exp \left\{ { - \frac{I}{C}\left[ {({{c}_{4}}{{c}_{5}} - {{c}_{2}}{{c}_{3}})\cos \theta + ({{c}_{3}}{{c}_{5}} - {{c}_{1}}{{c}_{4}})\sin {\kern 1pt} \theta + \sqrt {\alpha \beta } } \right]} \right\}{\kern 1pt} .$Эта формула справедлива, если случайный процесс (1) является стационарным, нормальным и центрированным. Коэффициенты ci представляют собой измеренные или рассчитанные статистические моменты второго порядка пульсаций давления и компонент колебательной скорости: ${{c}_{0}} = \sigma _{P}^{2}$, ${{c}_{1}} = \sigma _{X}^{2}$, ${{c}_{2}} = \sigma _{Y}^{2}$, ${{c}_{3}} = {{R}_{{PX}}}$, ${{c}_{4}} = {{R}_{{PY}}}$, ${{c}_{5}} = {{R}_{{XY}}}$, а коэффициенты α, β и C выражаются через них:
Интегрирование (10) по I от 0 до ∞ приводит к следующему выражению
(11)
$\begin{gathered} {{w}_{g}}({{\theta }}) = \frac{1}{{2{{\pi }}\sqrt {{\alpha }} }} \times \\ \times \,\,\frac{C}{{({{c}_{4}}{{c}_{5}} - {{c}_{2}}{{c}_{3}})\cos {{\theta }} + ({{c}_{3}}{{c}_{5}} - {{c}_{1}}{{c}_{4}})\sin {{\theta }} + \sqrt {{\kern 1pt} {{\alpha \beta }}} }}, \\ \end{gathered} $Следовательно, математическое ожидание модуля вектора Умова при условии, что его аргумент равен θ, рассчитывается по формуле:
По аналогии с (8) угловая плотность модуля вектора Умова в гауссовом поле Ug равна произведению условного математического ожидания на плотность вероятности аргумента:
(12)
$\begin{gathered} {{U}_{g}}({{\theta }}) = {\text{M}}[\left. I \right|{{\theta }}]{{w}_{g}}({{\theta }}) = \frac{1}{{2\pi \sqrt {{\alpha }} }} \times \\ \times \,\,\frac{{{{C}^{2}}}}{{{{{[({{c}_{4}}{{c}_{5}} - {{c}_{2}}{{c}_{3}})\cos {{\theta }} + ({{c}_{3}}{{c}_{5}} - {{c}_{1}}{{c}_{4}})\sin {{\theta }} + \sqrt {{{\alpha \beta }}} ]}}^{2}}}}. \\ \end{gathered} $Функцию Gg(φ) = Ug(θ – π) формально можно рассматривать как оценку угловой плотности, полученную в гауссовом поле, так же как функцию wg(θ – π) как оценку угловой плотности вероятности wφ(φ). Оценка нормированной угловой плотности в гауссовом поле равна:
В гауссовом поле угловые плотности аргумента (11) и модуля (12) вектора Умова вычисляются через дисперсии и функции взаимной корреляции компонент поля, которые зависят только от нулевой, первой и второй гармоник разложения G(φ) по углу φ. Это позволяет предположить, что оценки угловой плотности Gg(φ) и угловой плотности вероятности wg(φ) могут существенно отличаться от функций G(φ) и wφ(φ).
ЭВОЛЮЦИЯ УГЛОВОЙ ПЛОТНОСТИ МОДУЛЯ И ПЛОТНОСТИ ВЕРОЯТНОСТИ АРГУМЕНТА ВЕКТОРА УМОВА ПРИ ИЗМЕНЕНИИ ИНТЕНСИВНОСТИ ПРОЦЕССА
Полученные в предыдущих разделах формулы позволяют проанализировать асимптотическое поведение статистических характеристик поля при qτ → 0 и qτ → ∞. Однако, можно ожидать, что в практически важных случаях процесс (1) будет иметь некоторое промежуточное значение интенсивности qτ. Анализ изменения статистических характеристик поля при изменении интенсивности процесса (1) проведем численно.
В качестве примера рассмотрим шумовое поле, имеющее угловую плотность в виде суммы изотропного и трех локальных составляющих шума. В качестве модели такого шумового поля был сконструирован трехкомпонентный дискретный по времени процесс (P0, X0, Y0). Частота дискретизации fd принята равной 1. Длина выборки составляла N отсчетов. Изотропная составляющая шума моделировалась пуассоновским процессом, образованным импульсами, следующими со средней частотой q0 = 1/16, плотность вероятности распределения импульсов по длине выборки равномерная. Амплитуда импульсов a0 распределена нормально со средним значением, равным 0, и дисперсией 1. Распределение по углу φ в области –π ≤ φ < π равномерное. Локальные шумовые составляющие представляли собой независимые пуассоновские последовательности со средними частотами следования импульсов: q1 = 1/64, q2 = = 1/32, q3 = 1/128. Распределение по углу φ локальных составляющих шума – нормальное со средними значениями φ01 = –90°, φ02 = 0°, φ03 = 90° и равными среднеквадратическими отклонениями σφ = 5°. Длина импульсов всех составляющих равна 1. Отношение дисперсий амплитуд локальных и изотропной составляющих шума составляло: $g_{1}^{2} = {{{{\sigma }}_{{a1}}^{2}} \mathord{\left/ {\vphantom {{{{\sigma }}_{{a1}}^{2}} {{{\sigma }}_{{a0}}^{2}}}} \right. \kern-0em} {{{\sigma }}_{{a0}}^{2}}} = 1$, $g_{2}^{2} = {{{{\sigma }}_{{a2}}^{2}} \mathord{\left/ {\vphantom {{{{\sigma }}_{{a2}}^{2}} {{{\sigma }}_{{a0}}^{2}}}} \right. \kern-0em} {{{\sigma }}_{{a0}}^{2}}} = {1 \mathord{\left/ {\vphantom {1 2}} \right. \kern-0em} 2}$, $g_{3}^{2} = {{{{\sigma }}_{{a3}}^{2}} \mathord{\left/ {\vphantom {{{{\sigma }}_{{a3}}^{2}} {{{\sigma }}_{{a0}}^{2}}}} \right. \kern-0em} {{{\sigma }}_{{a0}}^{2}}} = 2$. Фрагмент полученного процесса приведен на рис. 2. Описанному процессу соответствует угловая плотность вероятности
(13)
$\begin{gathered} {{w}_{\varphi }}(\varphi ) = \frac{1}{{1 + {{{{q}_{1}}} \mathord{\left/ {\vphantom {{{{q}_{1}}} {{{q}_{0}}}}} \right. \kern-0em} {{{q}_{0}}}} + {{{{q}_{2}}} \mathord{\left/ {\vphantom {{{{q}_{2}}} {{{q}_{0}}}}} \right. \kern-0em} {{{q}_{0}}}} + {{{{q}_{3}}} \mathord{\left/ {\vphantom {{{{q}_{3}}} {{{q}_{0}}}}} \right. \kern-0em} {{{q}_{0}}}}}} \times \\ \times \,\,\left( {\frac{1}{{2{{\pi }}}} + \sum\limits_{j = 1}^3 {\frac{{{{q}_{j}}}}{{{{q}_{0}}\sqrt {2{{\pi }}} {{{{\sigma }}}_{\varphi }}}}\exp \left[ {{{ - {{{(\varphi - {{\varphi }_{{0j}}})}}^{2}}} \mathord{\left/ {\vphantom {{ - {{{(\varphi - {{\varphi }_{{0j}}})}}^{2}}} {2{{\sigma }}_{\varphi }^{2}}}} \right. \kern-0em} {2{{\sigma }}_{\varphi }^{2}}}} \right]} } \right) \\ \end{gathered} $(14)
$\begin{gathered} G(\varphi ) = \frac{{{{q}_{0}}{{\sigma }}_{{a0}}^{2}}}{{2{{\pi }}}} \times \\ \times \,\,\left\{ {1 + \sum\limits_{j = 1}^3 {\frac{{g_{i}^{2}{{q}_{j}}\sqrt {2{{\pi }}} }}{{{{{{\sigma }}}_{\varphi }}q_{0}^{2}}}\exp \left[ {{{ - {{{(\varphi - {{\varphi }_{{0j}}})}}^{2}}} \mathord{\left/ {\vphantom {{ - {{{(\varphi - {{\varphi }_{{0j}}})}}^{2}}} {2{{\sigma }}_{\varphi }^{2}}}} \right. \kern-0em} {2{{\sigma }}_{\varphi }^{2}}}} \right]} } \right\}. \\ \end{gathered} $
Для изменения формы и длительности импульсов использовалась операция фильтрования. В качестве фильтров применялись цифровые фильтры Баттерворта первого порядка с частотами среза fj = 0.256 × 2–j, j = 1…9, индекс 0 соответствует исходному процессу. Зависимости от времени нормированных откликов фильтров hj(t) на импульс единичной амплитуды при различных частотах среза приведены на рис. 3.
Рис. 3.
Нормированный отклик цифрового фильтра на импульс единичной длины и амплитуды. Цифры у кривых соответствуют номеру частоты среза. 0 – исходный импульс.

Для исходного (P0, X0, Y0) и каждого из профильтрованных процессов (Pj, Xj, Yj) и значений tn, n = 0…N–1, рассчитывался модуль вектора Умова: Inj = |Pj Xj + iPj Yj|, а аргумент θnj вычислялся согласно (6). Число отсчетов, для которых определены значения аргумента вектора Умова, равно:
Область 0…2π разбивалась на M равных интервалов: θm = 2πm/M, m = 0…M – 1. Оценка плотности вероятности аргумента вектора Умова рассчитывалась по формуле:
Оценки плотностей вероятности угла φ для каждого процесса вычислялись согласно выражению: ${{\hat {w}}_{{\varphi j}}}({{\varphi }_{m}}) = {{\hat {w}}_{{{\text{U}}j}}}({{\varphi }_{m}} + {{\pi }})$, где φm = θm – π. Оценки угловой плотности модуля вектора Умова для каждого процесса рассчитывались по формуле:
Оценка угловой плотности поля по процессу (Pj, Xj, Yj) равна: ${{\hat {G}}_{j}}({{\varphi }_{m}}) = {{\hat {U}}_{j}}({{\varphi }_{m}} + {{\pi }})$. Для сравнения результатов удобнее пользоваться нормированными оценками угловых плотностей
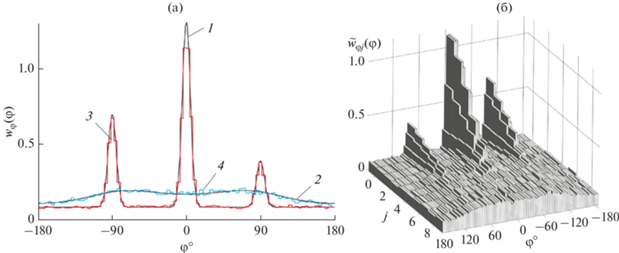
Результаты расчетов угловой плотности вероятности wφ(φ) и ее оценок представлены на рис. 4. На рис. 4а сплошными гладкими линиями 1 и 2 изображены результаты расчетов плотности вероятности угла φ исходного процесса по формуле (13) и ее оценки в гауссовом приближении – по формуле (11). Ступенчатые линии – рассчитанные гистограммы оценок плотности вероятности угла φ исходного процесса (P0, X0, Y0) $\hat {w}$φ0(φ) и $\hat {w}$φ9(φ), соответствующая частоте среза f9 = 0.0005. Попарное сопоставление кривых показывает, что численные расчеты удовлетворительно совпадают с аналитическими результатами. Следует отметить существенное различие угловой плотности вероятности поля и ее оценки, полученной в гауссовом приближении. На рис. 4б показана эволюция оценки плотности вероятности угла $\hat {w}$φj(φ) при изменении частоты среза фильтра fj.
Рис. 4.
(а) – Угловая плотность вероятности wφ(φ) (кривая 1), ее оценка в гауссовом поле wg(φ) (кривая 2), оценки $\hat {w}$φ0(φ) (кривая 3) и $\hat {w}$φ9(φ) (кривая 4), соответствующие исходному процессу и частоте среза f9 = 0.0005; (б) – эволюция оценок плотности вероятности угла $\hat {w}$φj(φ) при изменении частоты среза фильтра fj. N = 219, M = 90.
На рис. 5 представлены результаты расчета нормированной угловой плотности поля и ее оценок. На рис. 5а сплошными гладкими линиями 1 и 2 изображены результаты расчетов нормированной угловой плотности Г(φ) исходного процесса по формуле (14) и ее оценки в гауссовом приближении – по формуле (12). Ступенчатые линии – рассчитанные гистограммы оценок нормированной угловой плотности исходного процесса (P0, X0, Y0) Г0(φ) и Г9(φ) при частоте среза фильтра f9 = 0.0005. Сопоставление кривых показывает, что численные расчеты удовлетворительно совпадают с аналитическими. Следует также подчеркнуть существенное различие угловой плотности поля и ее оценки, полученной в гауссовом приближении. На рис. 5б показана эволюция оценки угловой плотности Гj(φ) при изменении частоты среза фильтра fj.
Рис. 5.
(а) – Нормированная угловая плотность поля Г(φ) (кривая 1), ее оценка в гауссовом поле Гg(φ) (кривая 2), оценки Г0(φ) (кривая 3) и Г9(φ) (кривая 4), соответствующие исходному процессу и частоте среза f9 = 0.0005; (б) – эволюция оценок нормированной угловой плотности Гj(φ) при изменении частоты среза фильтра fj. N = 219, M = 90.

Поведение оценок угловой плотности и угловой плотности вероятности при сужении полосы анализа практически совпадает и показывает, что при снижении частоты среза фильтра fc ниже 0.004 или fc/(q0 + q1 + q2 + q3) < 0.03, эти характеристики близки к найденным для гауссова приближения. Напротив, для того чтобы оценки приближались к истинным характеристикам поля, необходимо использовать фильтр с частотой среза более 0.064, т.е. должно выполняться условие fc/(q0 + q1 + q2 + q3) > 0.5. Однако, этот вывод справедлив только для фильтра рассмотренного типа и порядка. Использование фильтра иного типа и порядка повлияет на вид и длительность его импульсной характеристики, и, таким образом, изменит зависимость.
ЗАКЛЮЧЕНИЕ
При обработке сигналов ВСП могут быть получены функции, характеризующие направленные свойства поля. Такими функциями являются угловое распределение модуля вектора Умова и плотность вероятности его аргумента (фазы). Однако, для получения достоверных оценок угловой плотности и угловой плотности вероятности поля необходимо иметь возможность анализа широкополосных импульсных сигналов. Это может быть достигнуто только в том случае, когда такие сигналы, во-первых, излучаются, во-вторых, не претерпевают фатальных изменений при распространении и, в-третьих, преобразуются в форму, удобную для последующей обработки (электронные сигналы), с помощью достаточно широкополосного приемника-преобразователя.
В случае узкополосного приема оценки угловой плотности модуля и плотности вероятности аргумента вектора Умова будут близки к оценкам, которые могут быть найдены аналитически для гауссова поля. Для их вычисления достаточно знания дисперсий и функций взаимной корреляции компонент поля, которые полностью определяются только нулевой, первой и второй гармониками разложения угловой плотности поля G(φ) по углу φ. Последнее обстоятельство указывает на то, что в этом случае достоверные оценки угловой плотности поля могут быть получены в том случае, когда она формируется только перечисленными тремя гармониками разложения в ряд Фурье по углу.
Работа выполнена при поддержке государственного задания по теме “Акустика мелкого моря, нелинейная акустическая диагностика, нелинейная динамика волн” (номер гос. регистрации АААА-А18-118021390174-1).
Список литературы
Cron B., Sherman Ch. Spatial correlation functions for various noise models // J. Acoust. Soc. Am. 1962. V. 34(2). № 11. P. 1732–1736.
Бурдик В.С. Анализ гидроакустических систем. Л.: Судостроение, 1988. 392 с.
Кравчун П.Н., Пестов К.А., Тонаканов О.С. Об эмпирической модели шумов глубокого океана // Акуст. журн. 1992. Т. 38. № 5. С. 886–891.
Urick R.J. Ambient Noise in the Sea. Peninsula Publishing, 1984.
Hodgkiss W.S., Fisher F.H. Vertical Directionality of Ambient Noise At 32' N as a Function of Longitude // San Diego: Scripps Institution of Oceanography. Marine Physical Laboratory. MPL Technical Memorandum 387-A. 1988. 128 p.
Baggeroer A.B., Scheer E.K., NPAL Group. Statistics and vertical directionality of low-frequency ambient noise at the North Pacific Acoustic Laboratory site // J. Acoust. Soc. Am. 2005. V. 117. № 3. P. 1643–1665.
Farrokhrooza M., Wage K.E., Dzieciuch M.A., Worcester P.F. Vertical line array measurements of ambient noise in the North Pacific // J. Acoust. Soc. Am. 2017. V. 141. № 3. P. 1571–1581.
Yang Q., Yang K., Cao R., Duan S. Spatial vertical directionality and correlation of low-frequency ambient noise in deep ocean direct-arrival zones // Sensors. 2018. V. 18. № 2. P. 319.
Скребнев Г.К. Комбинированные гидроакустические приемники. СПб.: Элмор, 1997. 200 с.
Гордиенко В.А. Векторно-фазовые методы в акустике. М.: Физматлит, 2007. 480 с.
Ebeling K.J. Statistical Properties of Random Wave Fields // Mason W.P., Thurston R.N. Physical Acoustics. Principles and Methods. V. XVII. Acad. Press. 1984. P. 233–310.
Михайлов С.Г. Пеленгование векторно-скалярным приемником в поле анизотропной помехи // Акуст. журн. 2020. Т. 66. № 2. С. 170–180.
Захаров Л.Н., Киршов В.А., Рожин Ф.В. Пространственно-корреляционные функции компонент колебательной скорости для двух моделей звукового поля // Акуст. журн. 1972. Т. 18. № 1. С. 49–52.
Умов Н.А. Уравнения движения энергии в телах. Одесса: типография Ульриха и Шульце, 1874. 56 с.
Умов Н.А. Уравнения движения энергии в телах // Умов Н.А. Избранные сочинения. М., Л.: Гос. изд-во тех.-теор. лит-ры, 1950. С. 151–200.
Умов Н.А. Прибавление к статье “Уравнения движения энергии в телах” // Умов Н.А. Избранные сочинения. М., Л.: Гос. изд-во тех.-теор. лит-ры, 1950. С. 201–226.
Morse Ph.M., Ingard K.U. Teoretical Acoustics. McGrow-Hill book comp., 1968. 911 p.
Гордиенко В.А., Гордиенко Е.Л., Краснописцев Н.В., Некрасов В.Н. Помехоустойчивость гидроакустических приемных систем, регистрирующих поток акустической мощности // Акуст. журн. 2008. Т. 54. № 5. С. 774–785.
Тихонов В.И. Статистическая радиотехника. М.: Радио и связь, 1982. 624 с.
Gradshteyn I.S., Ryzhik I.M. Table of Integrals, Series, and Products. 7-th ed. Acad. Press. 2007. 1171 p.
Корн Г., Корн Т. Справочник по математике (для научных работников и инженеров). М.: Наука. 1973. 832 с.
Дополнительные материалы отсутствуют.
Инструменты
Акустический журнал