

Вестник Военного инновационного технополиса «ЭРА», 2023, T. 4, № 2, стр. 208-213
Оптимизация цифрового регулятора системы автоматического регулирования непрерывного объекта
А. С. Соболев 1, *, С. Г. Черный 1
1 Керченский государственный морской технологический университет
Керчь, Россия
* E-mail: sobolev.alexandr1496@gmail.com
Поступила в редакцию 06.07.2023
После доработки 06.07.2023
Принята к публикации 09.10.2023
Аннотация
Проведена оптимизация цифрового регулятора системы автоматического регулирования непрерывного объекта. Некоторые или все элементы непрерывной системы автоматического регулирования (САР), а также непрерывная САР целиком могут быть промоделированы дискретными моделями, описываемыми разностными, а не дифференциальными, как это делается в случае непрерывных моделей, уравнениями. Практическое значение в теории управления имеет представление дискретной моделью регулятора, что позволяет получить алгоритм цифрового преобразования, осуществляемого регулятором над ошибкой регулирования, и в итоге организовать дискретно-цифровое управление непрерывным объектом с помощью цифрового процессора. Дискретизация и квантование сигнала ошибки, а также восстановление сигнала управления следует осуществлять с должной точностью, обеспечивающей требуемую точность регулирования. Так, период дискретизации должен быть значительно меньше, по крайней мере, наибольшей постоянной времени объекта управления, а шаг квантования должен быть, по крайней мере, меньше максимально допустимой ошибки регулирования. Уменьшение периода дискретизации и шага квантования существенно повышает требования к быстродействию процессора.
ВВЕДЕНИЕ
Коммерческие суда относительно медленно используют потенциал полной интегрированной автоматизации в отрасли по сравнению с военными. Повышение уровня судовой автоматизации и систем интеграционной мобильности позволяет привести к существенной экономии и снижению затрат [1, 2].
Военные суда достаточно давно внедряют интегрированные системы, способные создавать связь с различными судовыми компонентами и сводить системы – в основном защитные и оружейные платформы – в один контрольный и наблюдательный пункт.
Сегодня системы автоматизации судна позволяют различным географически разрозненным компонентам соединиться и взаимодействовать, что позволяет оборудованию и системам управляться и функционировать дистанционно.
На торговых судах и военных кораблях во всем мире используются судовые системы управления и автоматизации для оптимизации работы корабельных двигателей, поворотных движителей, балласта, двигательных установок, рулевых устройств и т.д. Единая судовая архитектура должна обеспечивать управление и визуализацию в масштабах всего судна.
Разделим методы оптимизации дискретно-цифровых регуляторов САР непрерывными объектами на:
– методы замены оптимального непрерывного регулятора дискретно-цифровым в соответствии с выбранным критерием совпадения свойств САР с непрерывным и квазинепрерывным управлением;
– методы непосредственной оптимизации дискретно-цифрового регулятора с непрерывным объектом в контуре в соответствии с критерием близости оптимизированной САР к инвариантной или в соответствии с другим критерием [1–4].
Цель исследования – оптимизация цифрового регулятора системы автоматического регулирования непрерывного объекта.
ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ
Пусть дана непрерывная САР, регулятор которой уже оптимизирован одним из методов.
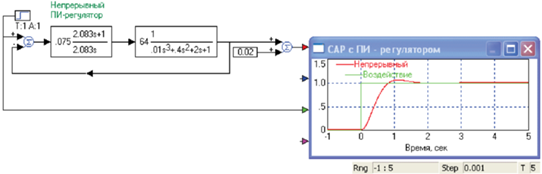
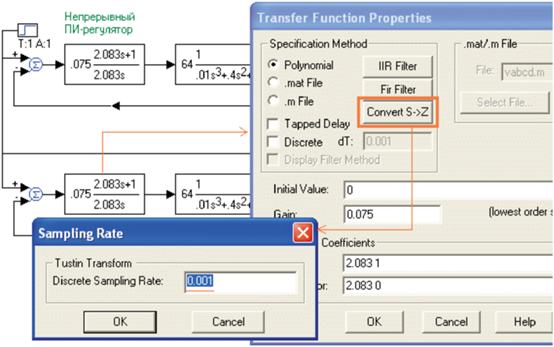
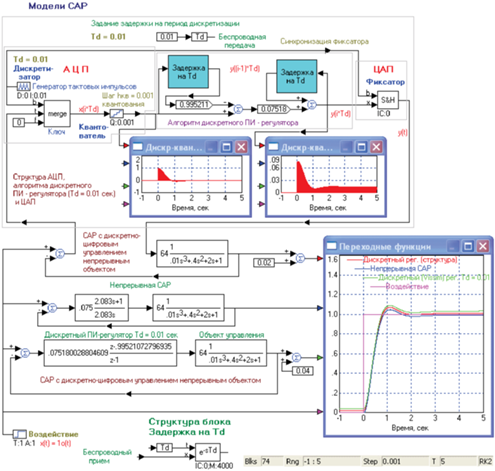
Замена непрерывного ПИ-регулятора осуществляется в соответствии с указаниями, приведенными в [5–8]. Для этого нужно скопировать оптимизированную САР, поместить ее ниже на рабочем поле для сравнения результатов и подключить ее к генератору ступеньки и осциллографу. Далее следует щелкнуть правой кнопкой по блоку ПИ-регулятора в копии САР, а в появившемся окне щелкнуть по кнопке Convert S → Z. В появившемся окне задать значение периода дискретизации. VisSim предлагает наименьший возможный при заданном шаге моделирования период дискретизации, равный этой величине. Для выбора периода дискретизации нужно обратиться к постоянным времени объекта управления. Как видно на рис. 1, наибольшая постоянная времени объекта равна 2 с, следующая по величине равна 0.4/2 = 0.2 с и последняя равна 0.01/(2 × × 0.4) = 0.0125 с. Таким образом, период дискретизации следует выбрать меньшим, чем наименьшая постоянная времени, например равным шагу моделирования 0.001 с.
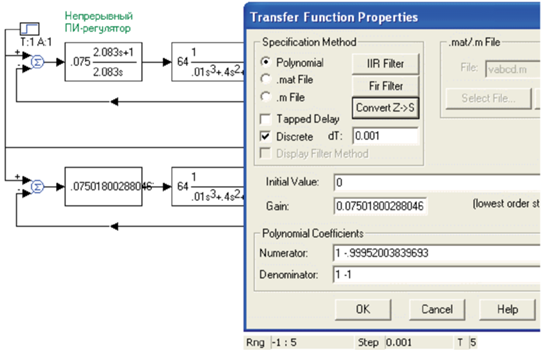
Щелкнув по кнопке “ОК”, получаем пересчитанные значения коэффициентов, т.е. значения коэффициентов Z-передаточной функции.Рис.2
Щелкнув по кнопке “ОК”, получаем модель САР с цифровым управлением непрерывным объектом с периодом дискретизации, равным 0.001 с, которую можно запустить для расчета для сравнения переходных характеристик моделей [6, 9–11]. Рис.3
Рис. 3.
Окно с коэффициентами Z-передаточной функции цифрового ПИ-регулятора, эквивалентного непрерывному регулятору.
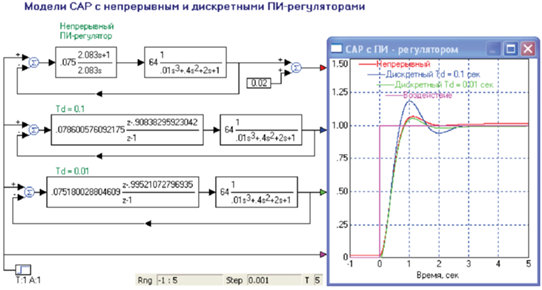
Для удобства сравнения переходная функция непрерывной САР приподнята на 0.02 единицы. Тем не менее полезно посмотреть на поведение САР и при больших значениях периода дискретизации, что позволит снизить вычислительную нагрузку на цифровой процессор компьютера, который будет осуществлять функции регулятора в производственных условиях. Увеличим в 10, а затем и в 100 раз период дискретизации. Если период дискретизации, равный 0.01 с, еще обеспечивает соответствие свойств непрерывной САР и САР с дискретным управлением, то дискретизация с периодом 0.1 с для заданного объекта приводит к существенным отличиям от оптимизированной непрерывной САР. Тем не менее САР с цифровым управлением с периодом дискретизации, равным 0.1 с, обеспечивает слежение, хотя и с несколько завышенным значением перерегулирования, равным 20%.Рис.4

РЕЗУЛЬТАТЫ И ИХ ОБСУЖДЕНИЕ
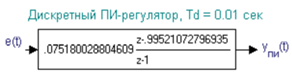
Определим алгоритм работы цифрового регулятора. На цифровой регулятор подается непрерывный сигнал ошибки с устройства сравнения (сумматора). Поэтому сигнал ошибки необходимо предварительно дискредитизировать и квантовать, т.е. преобразовать в последовательность числовых значений ошибки, следующих с периодом дискретизации, а затем уже подавать на цифровой процессор [11–15]. Эту функцию в реальной системе выполняет АЦП (аналогово-цифровой преобразователь). Собственно алгоритм работы с дискретизированным сигналом определяется Z-передаточной функцией ПИ-регулятора, которая уже получена (рис. 5). Построим цифровой алгоритм обработки для ПИ-регулятора с периодом дискретизации, равным 0.01 с.
Исходное выражение Z-передаточной функции дискретного ПИ-регулятора:
Числитель и знаменатель разделены на старшую степень знаменателя, т.е. на z и домножены на –1:
Z-изображение выходного сигнала ПИ-регулятора:
Переход к оригиналам, к решетчатым функциям, во временную область:
Полученная формула указывает алгоритм преобразования решетчатой функции, подаваемой с АЦП на цифровой ПИ-регулятор, параметры которого определены для периода дискретизации, равного 0.01 с. Алгоритм состоит в следующем (рис. 6).
Рис. 6.
Получение формулы вычисления значений решетчатой функции выходного сигнала дискретного регулятора.
Как видно из последней формулы, очередное на текущем такте значение выходного сигнала ПИ-регулятора определяется как сумма предыдущего его выходного значения и взвешенной с коэффициентом 0.07518 разности текущего и предыдущего, умноженного на 0.99 5211, значения входного сигнала (ошибки регулирования). Этот алгоритм легко может быть реализован на любом языке программирования, поддерживаемом тем компьютером, на который подается дискретизированный и квантованный сигнал, в том числе на языках Ассемблер, С++, Delphi и др., а также в виде структурной схемы в программах объектно-ориентированного моделирования, например Vissim, Simulink.
На вход цифрового процессора, реализующего алгоритм работы регулятора, подается цифровая решетчатая функция ошибки регулирования, а на выходе получается цифровая решетчатая функция управляющего сигнала объекта управления, которую следует преобразовать в непрерывный сигнал специальным фильтром, например ФНЧ или фильтром-защелкой (фиксатором значений на период дискретизации). Предлагается пример реализации цифрового алгоритма ПИ-регулятора в программе Vissim.
В соответствии со сформулированным выше алгоритмом в Vissim может быть построена структурная схема, выполняющая его.
Отметим, что в этой схеме модель дискретизатора построена на управляемом ключе merge, в то время как в схеме рис. 7 использована эквивалентная в математическом смысле операция перемножения стробирующих импульсов и входного сигнала.
ЗАКЛЮЧЕНИЕ
Некоторые или все элементы непрерывной САР, а также непрерывная САР целиком могут быть промоделированы дискретными моделями, описываемыми разностными, а не дифференциальными, как это делается в случае непрерывных моделей, уравнениями. Практическое значение в теории управления имеет представление дискретной моделью регулятора, что позволяет получить алгоритм цифрового преобразования, осуществляемого регулятором над ошибкой регулирования, и в конечном итоге организовать дискретно-цифровое управление непрерывным объектом с помощью цифрового процессора. Дискретизацию и квантование сигнала ошибки, а также восстановление сигнала управления следует осуществлять с должной точностью, обеспечивающей требуемую точность регулирования. Так, период дискретизации должен быть значительно меньше, по крайней мере, наибольшей постоянной времени объекта управления, а шаг квантования должен быть, по крайней мере, меньше максимально допустимой ошибки регулирования. Уменьшение периода дискретизации и шага квантования существенно повышает требования к быстродействию процессора.
Список литературы
Жиленков А.А., Абрамкина К.В., Епифанцев И.Р., Черный С.Г. // Электротехника. 2021. № 5. С. 57.
Черный С.Г. // Научно-техническая информация. Серия 2: Информационные процессы и системы. 2021. № 7. С. 19.
Черный С.Г., Доровской В.А., Новак Б.П. // Научно-техническая информация. Серия 2: Информационные процессы и системы. 2020. № 8. С. 20.
Tantawy A., Abdelwahed S., Abdelkarim E., Shaban K. // Comput. Secur. 2020. V. 96. P. 1. https://doi.org/10.1016/j.cose.2020.101864
Cook A., Janicke H., Smith R., Maglaras L. // Comput. Secur. 2017. V. 70. P. 467. https://doi.org/10.1016/j.cose.2017.07.009
Chaves A., Rice M., Dunlap S., Pecarina J. // Int. J. Crit. Infrastruct. Prot. 2017. V. 17. P. 30. https://doi.org/10.1016/j.ijcip.2017.03.005
Bolbot V., Theotokatos G., Boulougouris E., Vassalos D. // Saf. Sci. 2020. V. 131. P. 1. https://doi.org/10.1016/j.ssci.2020.104908
IEC 61000-4-7:2002 Electromagnetic compatibility (EMC). Pt 4–7: Testing and measurement techniques–general guide on harmonics and interharmonics measurements and instrumentation, for power supply systems and equipment connected thereto. Geneva: IEC, 2002. P. 71.
Zhilenkov A., Chernyi S., Nyrkov A., Sokolov S. // IOP Conf. Ser.: Earth Environ. Sci. 2017. V. 87. P. 082060.
Verbytskyi I. // Microsystems, Electronics and Acoustics. 2020. V. 25 (2). P. 25. https://doi.org/10.20535/2523-4455.mea.208428
Kulkarni A.G., Jha M., Qureshi M.F. // Int. J. Innov. Sci. Eng. Technol. 2014. V. 1. № 4. P. 46789.
Yassa N., Rachek M., Houassine H. // Energy Procedia. 2019. V. 162. P. 251. https://doi.org/10.1016/j.egypro.2019.04.027
Balouji E., Salor Ö., Bäckström K., McKelvey T. // IEEE Trans. Ind. Appl. 2020. V. 99. P. 147. https://doi.org/10.1109/TIA.2020.2976722
Vyngra A., Avdeyev B. Calculation of the Load of an Electric Drive of a Reciprocating Compressor of a Ship Refrigeration Unit // IEEE International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon), 2018. https://doi.org/10.1109/FarEastCon.2018.8602830
Balouji E., Salor Ö., Ermis M. // IEEE Trans. Ind. Appl. 2018. V. 54. P. 6566.
Zhilenkov A.A., Chernyi S.G., Firsov A. // J. Inf. Technol. Comp. Syst. 2021. № 1. P. 50.
Avdeyev B., Prosvirnin V., Dema R. // MATEC Web Conf. 2018. V. 224. P. 05003. https://doi.org/10.1051/matecconf/201822405003
Emelianov V., Emelianova N., Zhilenkov A., Chernyi S. // Entropy. 2021. V. 23. № 1. P. 1.
Дополнительные материалы отсутствуют.
Инструменты
Вестник Военного инновационного технополиса «ЭРА»