

Вестник Военного инновационного технополиса «ЭРА», 2023, T. 4, № 2, стр. 146-152
Экспериментальная парадигма для исследования эффекта пространственного интенционального связывания при удаленном управлении роботизированной мобильной платформой
Д. С. Лавров 1, А. С. Яшин 1, Д. Г. Чжао 1, *, Е. В. Мельничук 1, И. А. Дубынин 1
1 Национальный исследовательский центр “Курчатовский институт”
Москва, Россия
* E-mail: chzhao@phystech.edu
Поступила в редакцию 06.07.2023
После доработки 06.07.2023
Принята к публикации 05.10.2023
Аннотация
Представлена новая экспериментальная парадигма для изучения агентивности в ситуации удаленного управления роботизированным устройством. Агентивность, или чувство авторства в отношении действия, является необходимым условием для обустройства успешного человеко-машинного взаимодействия. Предложенная экспериментальная парадигма основана на феномене пространственного интенционального связывания – искажении субъективных оценок расстояния между действием и его результатом. Интенциональное связывание – широко известный показатель агентивности. Для испытания новой парадигмы разработана мобильная роботизированная платформа, позволяющая анализировать субъективные оценки расстояния. В пробном исследовании сравнили оценки испытуемых в трех условиях: при самостоятельном управлении мобильной платформой, при наблюдении за тем, как ее запускает экспериментатор, и при наблюдении за автоматическим запуском платформы. По итогам эксперимента обнаружена значимая разница между субъективными оценками расстояния в условиях с активностью испытуемого и экспериментатора. В то же время между условиями с активностью испытуемого и автоматическим запуском платформы разницы обнаружено не было. Объяснить эти результаты позволят дальнейшие исследования с применением описанной экспериментальной парадигмы и аппаратного комплекса.
ВВЕДЕНИЕ
При разработке любого технического устройства необходимо учитывать опыт пользователя, то, как человек будет воспринимать использование устройства. Следует оценивать качество человеко-машинного взаимодействия с точки зрения того, насколько человек вовлечен в управление системой. Быть вовлеченным в управление, значит, находить определенный отклик на любое свое действие при взаимодействии с устройством. Если человек не находит такого отклика, он теряет способность давать себе отчет о своих же действиях, в худших случаях снимая с себя ответственность за те или иные происшествия. При управлении важно корректное проявление агентивности (англ. “Sense of Agency”) [1] – особой осведомленности о собственных действиях и их результатах. Имея высокий уровень агентивности, человек распознает активность устройства как часть своих действий, что потенциально повышает качество управления. Но каким образом возможно определить уровень агентивности в конкретной ситуации? Вербальные суждения человека об авторстве действия не всегда отражают содержание непосредственного опыта: формулируя суждения, человек часто основывает их на сторонней информации и общих представлениях о происходящем. Например, сам факт нахождения в ситуации управления может послужить основанием для утвердительного суждения об авторстве, даже если у агента на деле отсутствует ощущение контроля. Именно поэтому психологи и нейрокогнитивные исследователи ведут поиск неявных коррелятов агентивности. Эти корреляты призваны пролить свет на непосредственные переживания человека при совершении действий – на то, в какой мере он ощущает себя автором действия. Нахождение жестких и информативных коррелятов агентивности – сложная задача, процесс решения которой продолжается по сей день. Одним из таких обсуждаемых и перспективных коррелятов является так называемое интенциональное связывание (Intentional Binding) [2] – эффект искажения субъективных оценок расстояния или времени между собственным действием агента и его результатом. Существует множество работ, посвященных интенциональному связыванию во времени, в то время как пространственный вариант интенционального связывания был открыт сравнительно недавно [3] и остается плохо изученным. Пространственный вариант привлекателен тем, что экспериментальные методики, использующие этот феномен, в значительной степени проще для испытуемого, которому в альтернативном случае приходилось бы оценивать временные интервалы в миллисекундах или концентрировать свое внимание на часах Либета [4]. В [5] была сформирована и протестирована методика оценки расстояния в качестве показателя агентивности в случае управления роботизированной коляской. Продолжая эту линию исследований, в данной работе предлагаем экспериментальную парадигму для изучения пространственного интенционального связывания при управлении роботизированной удаленной платформой. Также приводим результаты пробного исследования, проведенного с использованием данной парадигмы.
АППАРАТНЫЙ КОМПЛЕКС
Для успешного исследования пространственного интенционального связывания при управлении удаленной платформой сформированы следующие требования к аппаратному комплексу:
– реализация некоторого произвольного движения, которое позволяло бы вовлекать испытуемого в управление устройством (например, нажатие на клавишу для начала движения платформы);
– включение в управление платформой воспринимаемого результата действия (например, остановки платформы или сигнала, связанного с движением);
– задание точного интервала между действием и его результатом, который испытуемые могли бы оценивать. Так как речь идет о пространственном интенциональном связывании, должна происходить оценка пространственного интервала (например, оценка расстояния между точкой начала движения и точкой остановки).
Основываясь на этих требованиях, а также для минимизации влияния некоторых факторов, о которых будет сказано далее, была создана мобильная платформа (рис. 1а) на рельсовом треке (рис. 1б), оборудованная камерой. При разработке платформы исходили из того, что испытуемый будет наблюдать изображение с камеры на мониторе. Платформа реализована в виде физического объекта, чтобы поместить испытуемого в ситуацию реального управления устройством, как это предполагается при практическом использовании предлагаемой экспериментальной парадигмы. Моделирование изображения с помощью компьютерной графики привнесло бы влияние многих неконтролируемых факторов, связанных с особенностями работы систем интеграции сенсорных сигналов и измененным отношением испытуемого к экспериментальным условиям – сознательной установкой на управление виртуальным объектом.
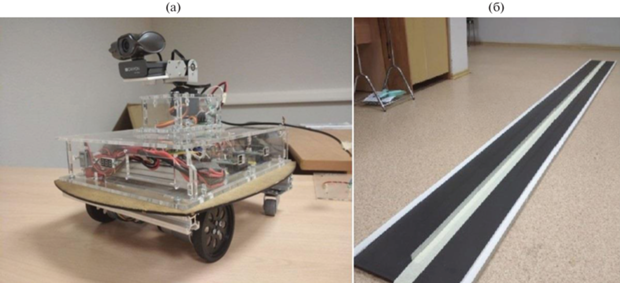
Мобильная платформа имела простую конструкцию, состоящую из движущегося шасси, корпуса с управляющей электроникой и камеры на сервоприводах, способной вращаться вокруг горизонтальной и вертикальной осей. Бортовое управление мобильной платформой осуществлялось с помощью двух микроконтроллеров на базе Atmega328 с платами расширения, которые с помощью драйвера двигателя и соответствующих регуляторов напряжения управляли моторами и сервоприводами камеры.
Общая схема аппаратного комплекса представлена на рис. 2. Связь контроллеров и системы управления осуществлялась по каналу Bluetooth, отдельного для каждой платы.

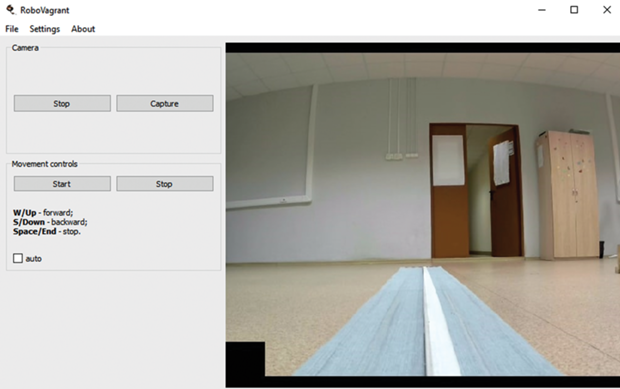
Управление установкой происходило с помощью разработанного нами бортового программного обеспечения и пользовательского интерфейса, где задавались номинальные расстояния, на которые платформа должна совершать движение (рис. 3).
Стабильность и точность выезда платформы проверяли на расстояниях 100, 120, 140, 160, 180, 200 см. В рамках проверки каждое значение выездного расстояния было записано 10 раз. Фиксировали заданные номинальные расстояния, средние от зафиксированных значений энкодеров двух двигателей и фактические расстояния, измеренные с помощью лазерного дальномера. Для заданных номинальных расстояний ошибка фактического движения была крайне мала по сравнению с проходимыми расстояниями и составляла менее 1% в бóльшую сторону. Сравнение показаний энкодеров и номинальных расстояний дало схожие результаты – менее 1% в бóльшую сторону для показаний энкодеров. Значения энкодеров показали более близкие результаты к фактическим расстояниям, чем заданные номинальные расстояния.
Для минимизации количества факторов, которые могли бы повлиять на пространственные оценки испытуемого, необходимо было добиться простоты общей системы и однородности среды, в которой перемещалась мобильная платформа. В ходе отладочных экспериментов заметили, что передвижение мобильной платформы по полу лабораторного помещения происходило с постепенными изменениями траектории (возможно, вследствие неравномерности покрытия), из-за чего экспериментатору периодически приходилось корректировать начальное положение робота. На основании этого при проведении исследования движение платформы осуществлялось исключительно по рельсовому треку, а ее конструкция была дополнена опорной системой – колесными парами на алюминиевом каркасе под мобильной платформой, которые плотно обхватывали рельсу.
Помимо этого, было решено использовать проводную веб-камеру Canyon CNS-CWC6N с разрешением 1080p, так как беспроводное решение по результатам предварительного тестирования вносило дополнительную задержку при передаче видеоизображения от камеры на экран оператора (~0.5 c), а также обеспечивало значительно более низкое качество картинки (240p). Использование проводной камеры нисколько не помешало тестированию новой экспериментальной парадигмы, поскольку платформа совершала выезды только по прямой, а провод от камеры не был заметен в кадре и не мешал движению платформы.
ЭКСПЕРИМЕНТАЛЬНАЯ ПАРАДИГМА
В предлагаемой парадигме для изучения пространственного интенционального связывания оператор удаленной платформы запускает ее с помощью нажатия клавиши или непрерывно управляет ее перемещением. Он наблюдает за движением до наступления некоторого события, связанного с движением платформы, после остановки платформы оценивает расстояние, пройденное от начала движения до наступления обозначенного события. Условие, в котором оператор осуществляет полный контроль над платформой, должно контрастировать с условиями, где испытуемый имеет неполный контроль над происходящим или пассивно наблюдает движение.
Новая парадигма позволяет перенести использование пространственного интенционального связывания в спектр ситуаций, где испытуемый получает данные об управляемом им устройстве удаленно. В [5] успешно опробовали пространственное интенциональное связывание при управлении роботизированной инвалидной коляской, где испытуемый телесно был вовлечен во взаимодействие с системой. В абсолютном большинстве исследований временного или пространственного интенционального связывания испытуемый совершает простые движения (наподобие нажатия клавиши) и получает отклик, напрямую связанный с этими движениями. В описанной парадигме между испытуемым и реальным выражением его действий возникает дистанция: намерение испытуемого состоит в инициации движения объекта, который он наблюдает опосредованно. Таким же опосредованным является результат действия. Вопрос о том, как подобная дистанция между испытуемым и его интенциональным объектом влияет на субъективные оценки испытуемого, является сложным и требует набора исследований для достаточного прояснения. Чтобы начать его изучение, а также апробировать предлагаемую парадигму, провели пробный эксперимент с использованием одного из вариантов методики.
ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
В эксперименте приняли участие 11 испытуемых. Перед проведением эксперимента каждый из них ознакомился с процедурой проведения эксперимента и дал добровольное согласие на участие в нем. Ни один испытуемый не подтвердил наличия у себя каких-либо неврологических отклонений. Каждый испытуемый мог по своему желанию в любой момент отказаться от участия в эксперименте.
В течение основной части эксперимента испытуемый сидел в регулируемом кресле за офисным столом перед монитором, на который выводилось изображение с камеры, закрепленной на мобильной платформе. Исследователь, проводящий эксперимент, сидел в некотором отдалении и мог наблюдать как за изображением на экране, так и за движением мобильной платформы.
Мобильная платформа располагалась на треке в том же помещении, что и испытуемый, но вне его поля зрения. Испытуемому сообщалось, что расстояния, которые она будет проходить, могут быть любыми от 0 до 300 см. Список номинальных расстояний при этом ограничивался шестью вариантами: 100, 120, 140, 160, 180, 200 см. Введение границ оценок с метровым запасом в обе стороны позволило не искажать завышенные и заниженные оценки испытуемого. Эксперимент содержал три условия, в которых различался источник инициации движения мобильной платформы:
– Act – запуск движения испытуемым посредством нажатия клавиши;
– PasAuto – автоматическое движение платформы без участия человека;
– PasHelper – запуск движения исследователем посредством нажатия клавиши.
Перед началом эксперимента испытуемому предоставляли возможность тренировки на каждом условии. Тренировку условия считали успешно завершенной, если испытуемый смог завершить несколько “выбегов” платформы и дать оценки расстояния.
Эксперимент состоял из трех блоков, каждый из которых содержал одинаковую последовательность неповторяющихся условий. Разные варианты последовательностей для испытуемых позволили исключить эффект последовательности. Каждая последовательность условий повторялась для одного или двух испытуемых.
В каждом условии при выбранной заранее последовательности испытуемый должен был завершить 10 “выбегов”, суммарно на каждый режим приходилось по 30 “выбегов”, всего “выбегов” было 90. Звуковой сигнал уведомлял испытуемого о том, что платформа готова к началу движения. После него мобильная платформа в зависимости от текущего условия ждала команды начала движения от испытуемого или экспериментатора либо сама начинала движение. После совершения “выбега” изображение с видеокамеры отключалось, и испытуемому предлагалось оценить пройденное расстояние во всплывающем диалоговом окне. Отключение изображения требовалось для того, чтобы испытуемый не мог оценить точное место остановки мобильной платформы постфактум, после окончания движения. В результате ввода оценки мобильная платформа возвращалась на стартовую позицию, изображение с видеокамеры снова появлялось, и система издавала звуковой сигнал о готовности начать новое движение.
Согласно нашей гипотезе, оценки расстояния в “активном” условии должны были быть в среднем больше, чем в двух “пассивных” условиях. Данное предположение основано на аналогии с результатами исследования агентивности в ситуации управления роботизированной коляской. Также ожидали, что в условии с активностью экспериментатора испытуемые будут давать промежуточные по величине оценки. За этим предположением стоят данные [6]: репрезентация действия другого человека также иногда способна вызывать интенциональное связывание во времени.
РЕЗУЛЬТАТЫ И ИХ ОБСУЖДЕНИЕ
Для тестирования пространственного интенционального связывания анализировали разности фактических расстояний, зафиксированных энкодерами двигателей платформы, и субъективными оценками испытуемых. Данные тренировочных серий в анализе не учитывали.
Средние значения разностей субъективных оценок при разных условиях вовлечения для каждого испытуемого представлены в табл. 1. Для анализа предполагаемой разницы между тремя экспериментальными условиями применяли дисперсионный анализ (ANOVA) с повторными измерениями. По итогам анализа был выявлен статистически значимый эффект: F (2.20) = 6.1286, p < 0.00840.
Таблица 1.
Средние значения разностей субъективных оценок испытуемых при разных условиях ± стандартное отклонение
| Код испытуемого | Act, см | PasHelper, см | PasAuto, см |
|---|---|---|---|
| МГ01 | 39.9 ± 14.3 | 35.6 ± 11.2 | 40.4 ± 14.1 |
| НД02 | 47.0 ± 32.8 | 30.7 ± 41.4 | 49.5 ± 16.2 |
| ОЕ03 | 14.6 ± 23.3 | 9.1 ± 17.7 | 13.8 ± 18.6 |
| П304 | 45.9 ± 30.4 | 35.0 ± 17.8 | 39.7 ± 30.0 |
| РИ05 | –22.0 ± 12.8 | –20.9 ± 12.2 | –28.7 ± 14.8 |
| ТК06 | –75.4 ± 51.0 | –92.7 ± 19.7 | –81.8 ± 28.1 |
| УН07 | 54.8 ± 24.1 | 55.4 ± 28.1 | 47.6 ± 22.11 |
| УЩ08 | –54.8 ± 13.7 | –55.2 ± 13.9 | –57.6 ± 12.1 |
| ФА09 | 3.3 ± 27.4 | 0.4 ± 20.8 | 3.7 ± 20.3 |
| ЩУ10 | –52.6 ± 33.1 | –63.0 ± 29.3 | –59.7 ± 18.5 |
| ЭО11 | –90.0 ± 21.9 | –98.2 ± 25.3 | –96.1 ± 24.4 |
Post-hoc-тесты (Fisher’s LSD) подтвердили статистическое различие результатов активного условия и условия запуска движения экспериментатором (p < 0.0024). Между другими парами условий таких значимых различий обнаружено не было. Размах средних разностей для трех условий изображен на рис. 4. В описанном выше эксперименте опробовали новую парадигму для изучения феномена пространственного интенционального связывания при управлении роботизированной мобильной платформой.
Рис. 4.
Диаграмма размаха средних разностей между оценками испытуемых и фактическими расстояниями (см) для разных условий вовлеченности оператора.
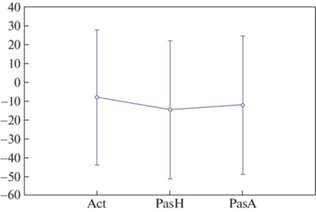
Согласно нашей гипотезе, оценки расстояния в “активном” условии должны были быть значимо больше, чем в двух “пассивных” условиях, где испытуемый не запускал мобильную платформу самостоятельно. В одном из “пассивных” условий платформу запускал экспериментатор, а в другом она инициировала движение автоматически. Поэтому предположили, что управление платформой экспериментатором будет промежуточным условием в плане величины сдвига между оценкой и расстоянием.
Проведя анализ, значимого различия между двумя “пассивными” условиями не обнаружили. В то же время дисперсионный анализ (ANOVA) с повторными измерениями обнаружил разницы в оценке между активным условием и пассивным условием с участием экспериментатора. В свою очередь, условия с самостоятельным запуском платформы испытуемым и ее автоматическим запуском оказались статистически не различимы (p < 0.050003).
Полученные результаты отчасти аналогичны тем, что имели место в [5]: в активном условии оценки были значимо больше, чем хотя бы в одном пассивном. В обоих случаях основным объяснением полученных результатов считаем особенности методики, которая значительно отличается от использованной в литературе. Тем не менее условия настоящего эксперимента существенно отличаются от тех, что создали в эксперименте с коляской: управляя мобильной платформой, испытуемый не перемещался в пространстве, наблюдал за последствиями своих действий с помощью экрана монитора, а также контролировал только запуск платформы. Нельзя исключать, что в совокупности эти различия существенны для проявлений феномена пространственного интенционального связывания.
На результаты эксперимента могла повлиять и общая неуверенность испытуемого в своем контроле над движением мобильной платформы. Испытуемый мог переживать более яркий опыт агентивности при наблюдении за привычными уверенными действиями исследователя при выполнении экспериментальной методики. Для проверки гипотезы возможно совмещение участия двух испытуемых одновременно, один будет являться пассивным наблюдателем, а другой – активно вовлечен в управление, смена условий будет осуществляться между сериями.
Существует также вероятность того, что для запуска платформы с помощью нажатия клавиши вообще не воспроизводится феномен пространственного интенционального связывания. Нажатие клавиши является простым и быстрым движением, которое часто рассматривается в экспериментах по изучению интенционального связывания. Однако оно позволяет контролировать только момент запуска платформы. Не исключаем, что для более явного воспроизведения феномена требуется увеличить степень контроля испытуемого над происходящими в эксперименте событиями. Если полученный эффект не относится напрямую к пространственному интенциональному связыванию, следует принять во внимание альтернативные объяснения, связанные с распределением внимания испытуемого. Например, выявленная разница между условиями, где инициатором начала движения был испытуемый и где инициатором начала движения был экспериментатор, может объясняться тем, что испытуемый следил за движением руки исследователя при нажатии клавиши и только после этого переводил взгляд на экран, чтобы начать оценку пройденного расстояния. Так испытуемый терял из виду часть начального движения мобильной платформы, что и привело к уменьшению оценок расстояния.
ВЫВОДЫ
Представлена экспериментальная парадигма для исследования феномена пространственного интенционального связывания в условиях удаленного управления мобильным техническим устройством. Использование этой парадигмы в дальнейших экспериментах позволит создать практические методики для определения уровня агентивности у оператора роботизированного устройства с удаленным управлением. Высокий уровень агентивности необходим для обеспечения качественного человеко-машинного взаимодействия. Для апробирования новой парадигмы провели эксперимент с применением роботизированной мобильной платформы.
По итогам эксперимента обнаружено большее сокращение субъективных пространственных оценок в условии, где инициатором движения выступал другой человек, сидящий рядом с испытуемым. Это условие контрастировало с активным условием, в котором испытуемый запускал движение платформы самостоятельно. Данный результат аналогичен результатам, полученным с применением роботизированной коляски [5]. С другой стороны, активное условие и условие с самостоятельным движением платформы были статистически не различимы. Сформулировали несколько возможных объяснений этому факту, но выявить конкретную причину помогут другие эксперименты.
Для изучения феномена пространственного интенционального связывания требуются дальнейшие исследования, которые могут быть проведены с применением описанной в данной работе парадигмы. В том случае, если феномен будет надежно воспроизведен в ситуации управления удаленным устройством, пространственные оценки могут быть использованы как показатель вовлеченности оператора в процесс управления.
Список литературы
Gallagher S. // Trends Cogn. Sci. 2000. V. 4. № 1. P. 14.
Haggard P., Clark S., Kalogeras J. // Nat. Neurosci. 2002. V. 5. № 4. P. 382.
Kirsch W., Pfister R., Kunde W. // Atten. Percept. Psychophys. 2016. V. 78. P. 133.
Libet B. et al. // Brain. 1983. V. 106. № 3. P. 623.
Yashin A.S. et al. // Appl. Sci. 2022. V. 12. P. 6217.
Strother L., House K.A., Obhi S.S. // Conscious. Cogn. 2010. V. 19. № 1. P. 12.
Дополнительные материалы отсутствуют.
Инструменты
Вестник Военного инновационного технополиса «ЭРА»