

Вестник Военного инновационного технополиса «ЭРА», 2022, T. 3, № 2, стр. 151-156
ИСПЫТАНИЯ МАКЕТНОГО ОБРАЗЦА УНИПОЛЯРНОГО ВТСП-2 ЭЛЕКТРОДВИГАТЕЛЯ С ИСПОЛЬЗОВАНИЕМ СИЛЬНОТОКОВОГО СКОЛЬЗЯЩЕГО КОНТАКТА НА ОСНОВЕ СПЛАВА ГАЛЛИЙ–ИНДИЙ–ОЛОВО
М. Н. Макаренко 1, А. В. Наумов 1, А. В. Поляков 1, *, М. И. Сурин 1, В. И. Щербаков 1
1 Национальный исследовательский центр “Курчатовский институт”
Москва, Россия
* E-mail: alxadress@gmail.com
Поступила в редакцию 13.03.2022
После доработки 20.03.2022
Принята к публикации 20.03.2022
Аннотация
Описана конструкция испытательной установки и представлены результаты экспериментов по работе униполярного электродвигателя с обмоткой возбуждения на основе высокотемпературных сверхпроводников второго поколения и дисковым ротором с жидкометаллическими скользящими контактами. Описана работа двигателя под управлением ПИД-регулятора в режиме удержания постоянных оборотов. Представлены результаты использования сплава галлий–индий–олово для создания жидкометаллического скользящего контакта.
ВВЕДЕНИЕ
Униполярные двигатели и генераторы представляют собой особую разновидность электрических машин, работающих на постоянном токе. В отличие от широко распространенных многополюсных электрических машин проводник с током в униполярной машине (обычно имеющий форму диска или цилиндра) пересекает силовые линии внешнего магнитного поля всегда в одном направлении, таким образом, униполярный двигатель для вращения требует постоянный ток, а униполярный генератор способен создавать сразу, без выпрямителей, постоянную электродвижущую силу [1, 2]. Внешнее магнитное поле обмотки возбуждения также должно быть постоянным, а не вращающимся. Использование явления сверхпроводимости позволяет создавать сильные магнитные поля, причем отсутствие режимов работы на переменном токе является более предпочтительным для сверхпроводника [3] и позволяет значительно повысить мощность [4].
С середины прошлого века униполярные генераторы с обмотками из низкотемпературного сверхпроводника представляли большой интерес, так как способны генерировать большой, до сотен килоампер, постоянный ток [5, 6]. В настоящее время интерес к униполярным электрическим машинам, только уже в качестве двигателей, возвращается [7–9]. Современные материалы на основе высокотемпературных сверхпроводников (ВТСП) позволяют упростить конструкцию криостата и снизить эксплуатационные затраты за счет повышения рабочей температуры обмотки до температуры жидкого азота. В мире рассматривается перспектива использования униполярных двигателей в транспорте и промышленности [7, 8].
Одной из основных сложностей при создании униполярной машины является подвод постоянного тока к вращающемуся ротору. При небольшом напряжении сила тока в роторе должна достигать высоких значений [4, 6]. Применение угольных или металлографитовых щеток не может обеспечить требуемых значений тока из-за высокого контактного сопротивления и габаритов. Решением проблемы может стать применение жидкометаллических скользящих контактов. Вариантами материала жидкого металла, работающего при комнатной температуре, могут быть ртуть, сплав натрия с калием (NaK), сплавы на основе галлия [10]. Из этого списка лишь сплавы на основе галлия являются безопасными, остальные требуют сложных технических решений для обеспечения безопасной работы с ними. Отметим, что галлиевые сплавы, как и NaK, возможно, подвержены медленной деградации в кислородсодержащей среде [11].
В настоящей публикации описана конструкция испытательной установки и представлены результаты экспериментов по работе униполярного электродвигателя с обмоткой возбуждения на основе ВТСП второго поколения (ВТСП-2) и дисковым ротором с жидкометаллическими скользящими контактами на основе сплава галлий–индий–олово.
КОНСТРУКЦИЯ ИСПЫТАТЕЛЬНОЙ УСТАНОВКИ
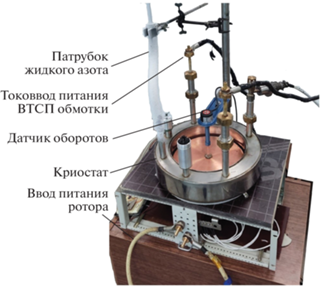
Испытательная установка (рис. 1) состоит из:

– макета униполярного ВТСП-2 двигателя;
– системы ввода тока;
– системы диагностики и мониторинга.
Разработка и изготовление макетного образца униполярного ВТСП-2 электродвигателя с обмоткой возбуждения на основе ВТСП-2 и ротором с жидкометаллическими скользящими контактами (рис. 2) описана в [12–14].
Постоянное магнитное поле создается магнитной системой из ВТСП-2, изготовленной из четырех отдельных галетных катушек с тремя промежуточными паяными электрическими соединениями. Каждая галета состоит из 50 витков ВТСП-ленты второго поколения (всего 200 витков). Основные параметры ВТСП-2 магнитной системы приведены в табл. 1.
Таблица 1.
Основные параметры ВТСП-2 магнитной системы макетного образца униполярного двигателя
| Параметр | Значение |
|---|---|
| Тип магнита | Галетный |
| Количество галет, шт. | 4 |
| Внутренний диаметр магнита, мм | 268 |
| Внешний диаметр магнита, мм | 278 |
| Общее сечение обмотки, мм × мм | 10 × 16 |
| Количество витков в одной галете | 50 |
| Сверхпроводник | SuperPowerREBCO 4 мм × 0.1 мм в полиимидной изоляции, Icmin = 109 A в собственном поле при 77 K |
| Общая длина ленты ВТСП-2, м | 180 |
| Количество внутренних спаев | 3 |
| Полная индуктивность, мГн | 24 |
| Сопротивление спая, нОм | 111 |
| Коэффициент магнитной индукции в центре, мТл/А | 0.93 |
ВТСП-2 магнитная система размещена в кольцевом азотном криостате, снабженном латунными токовводами и электрическим разъемом для контроля температуры и потенциалов на ВТСП-2 соленоиде.
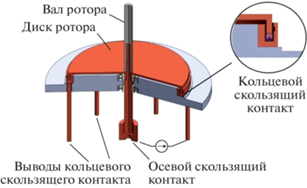
Ротор двигателя представляет собой медный диск толщиной 4 мм с контактным кольцом на периферии и цилиндрическим контактом на оси. Жидкометаллические скользящие контакты заполнены сплавом галлий–индий–олово (Ga – 62%, In – 25%, Sn – 13%) с температурой плавления 4.85°С. На рис. 3 показана конструкция ротора и жидкометаллических скользящих контактов.
Рабочая температура ВТСП-2 соленоида 77 К достигается заливкой в криостат жидкого азота. Контроль температуры осуществляется с помощью платиновых термометров сопротивления Pt100, размещенных на обмотке и в местах спая ВТСП-2 ленты с токовводами, и многоканального мультиметра Agilent 34970A. Защита от перехода обмотки в нормальное (не сверхпроводящее) состояние осуществляется путем непрерывной регистрации балансного напряжения между двумя парами галет, которое должно составлять не более 10 мкВ. При помощи модульной измерительной системы NationalInstruments CompactRIO проводятся непрерывная визуализация и запись напряжения и тока ВТСП-соленоида. Управление током ВТСП-2 магнитной системы осуществляется программируемым источником тока Lambda GEN8-300 под управлением с отдельного компьютера.
Ток ротора задается программируемым источником постоянного тока Lambda GEN10-500 с максимальным током 500 А. Частота вращения ротора измеряется путем регистрации частоты импульсов от установленного на валу инкрементального энкодера AutonicsE40S. Управление источником тока ротора, визуализация и запись параметров работы проводятся с помощью специально написанной программы в среде LabVIEW.
РЕЗУЛЬТАТЫ ИСПЫТАНИЙ
Экспериментально подтверждены основные характеристики ВТСП-2 магнитной системы. Для этого ВТСП-2 обмотка была охлаждена до температуры 77 К подачей жидкого азота в криостат. Ввод тока в соленоид осуществлялся со скоростью 0.1 А/с. По ранее измеренной вольт-амперной характеристике соленоида [14] определен рабочий ток, который составил 32 А. С помощью датчика Холла измерено радиальное распределение магнитного поля в плоскости диска ротора (рис. 4).
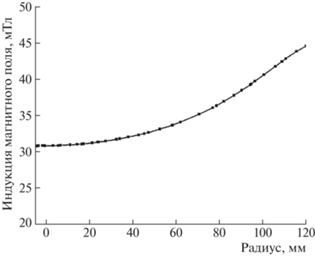
Коэффициент магнитной индукции в центре составляет 0.93 мТл/А, что полностью соответствует расчетному значению. Путем численного интегрирования кривой радиального распределения магнитного поля в плоскости диска ротора определено соотношение крутящего момента и тока ротора. Оно составляет 0.27 × 10–3 Н · м/А. Максимальный крутящий момент при максимальном токе источника 500 А составляет 0.135 Н · м. Электрическое сопротивление ротора, включая сопротивление скользящих контактов, составляет 0.6 мОм.
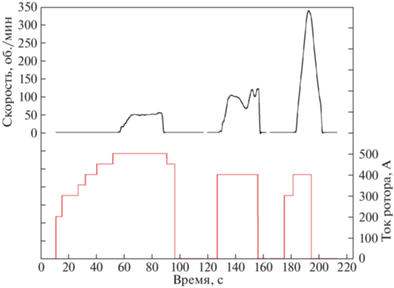
Проведены испытания макетного образца ВТСП-2 униполярного двигателя. На рис. 5 показана динамика вращения ротора при подаче на него постоянного тока. Нестабильность поведения скорости ротора связана с тем, что, находясь изначально в жидком состоянии, через несколько недель после заливки в установку вязкость жидкометаллического сплава повысилась. При этом электрические свойства скользящего контакта не изменились, и он оставался работоспособным во всем доступном диапазоне токов вплоть до 500 А.
Получены результаты испытаний системы управления униполярным электродвигателем в режиме удержания заданных оборотов. В отличие от многополюсных электродвигателей, в которых управление крутящим моментом и частотой вращения осуществляется при помощи частотного преобразователя, в униполярном электродвигателе крутящий момент задается лишь величиной постоянного тока ротора. В данном режиме ток ротора задавался управляющей компьютерной программой, которая при помощи пропорционально-интегрально-дифференцирующего (ПИД) алгоритма рассчитывала необходимую величину тока в зависимости от разницы между измеренной скоростью вращения и заданной.
На рис. 6 показана динамика вращения ротора под управлением ПИД-регулятора. Пунктиром на верхней кривой обозначена уставка оборотов ротора, составлявшая 100 и 200 об./мин.
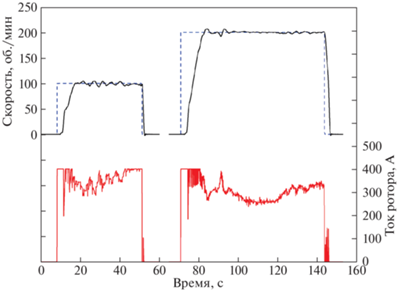
Настройка параметров ПИД-регулятора проводилась методом Зиглера–Никольса [15]. Описание подбора параметров в расчетной модели униполярного двигателя приведено в [13]. Демонстрируется высокая стабильность удержания заданных оборотов, несмотря на переменную нагрузку, связанную с вязкостью жидкого металла скользящего контакта, означающая оптимальный выбор настроечных параметров ПИД-регулятора.
После испытаний криостат с ВТСП-2 обмоткой возбуждения был снят и проведен осмотр скользящего контакта. Состояние жидкометаллического контакта после испытаний показано на рис. 7.
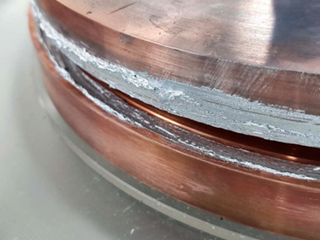
Как видно, консистенция жидкометаллического сплава скользящего контакта стала пастообразной. Рассматривается несколько причин подобной деградации. Среди них взаимодействие с кислородом в воздухе, взаимодействие компонентов сплава с медью, влияние протекающего через сплав электрического тока. Взаимодействие с кислородом в данном случае маловероятно, так как хранение сплава также осуществлялось в негерметичной таре. Компоненты сплава могут образовывать с медью соединения [16], но в основном при температурах значительно выше комнатной. Возможно исключить контакт с медью путем ее покрытия другим металлом, например никелем. Также возможным решением может быть поиск более стабильного состава легкоплавкого сплава на основе галлия.
ВЫВОДЫ
Изготовлена испытательная установка макетного образца униполярного электродвигателя с обмоткой возбуждения на основе ВТСП-2 и дисковым ротором с сильнотоковым скользящим контактом.
Проведены испытания макетного образца униполярного ВТСП-2 электродвигателя с использованием сильнотокового скользящего контакта на основе сплава галий–индий–олово:
– измерены основные характеристики ВТСП-2 магнитной системы униполярного электродвигателя. Значения магнитной индукции соответствуют расчетным;
– получены результаты испытаний работы двигателя при токах ротора до 500 А;
– продемонстрирован режим автоматического удержания заданных оборотов под управлением ПИД-регулятора. Двигатель показал хорошую управляемость и стабильность оборотов.
Несмотря на то что жидкометаллический скользящий контакт обладает низким сопротивлением и способен пропускать большие токи, требуется выработка мер по подбору оптимального состава жидкого металла и его защите от внешних воздействий.
Результаты испытаний подтвердили заявленные характеристики униполярного ВТСП-2 двигателя. Таким образом, успешно завершена работа по созданию действующего макета униполярного двигателя – демонстратора технологий электродвижения с использованием ВТСП-2 магнитной системы.
Авторы выражают благодарность И.Ю. Лазареву, Д.Ю. Соловьеву и А.Д. Сусакову за помощь в подготовке и проведении испытаний.
Работа выполнена при финансовой поддержке Национального исследовательского центра “Курчатовский институт”, приказ № 2754 от 28.10.2021.
Список литературы
Сверхпроводящие машины и устройства / Под ред. Фонера С., Шварца Б.; пер. с англ. под ред. Клименко Е.Ю. М.: Мир, 1977. 763 с.
Zengel K. // Eur. J. Phys. 2019. V. 40. P. 055202.https://doi.org/10.1088/1361-6404/ab2345
Уилсон М. Сверхпроводящие магниты. М.: Мир, 1985.
Arkkio A., Berglund P., Eriksson J.T. et al. // IEEE Trans. Magn. 1981. V. 17. № 1. P. 900.https://doi.org/10.1109/TMAG.1981.1061116
Суханов Л.А., Сафиуллина Р.Х., Бобков Ю.А. Электрические униполярные машины. М.: ВНИИЭМ, 1964. 136 с.
Baker N., McKee B., McNab I. // IEEE Trans. Magn. 1986. V. 22. № 6. P. 1386.https://doi.org/10.1109/TMAG.1986.1064641
Thongam J.S., Tarbouchi M., Okou A.F. et al. // IEEE EPEC. 2013. P. 1.https://doi.org/10.1109/EPEC.2013.6802942
Fuger R., Matsekh A., Kells J. et al. // Supercond. Sci. Technol. 2016. V. 29. № 3.https://doi.org/10.1088/0953-2048/29/3/034001
Thome R.J., Creedon W., Reed M. et al. // IEEE Power Engineering Society Summer Meeting. 2002. V. 1. P. 260.https://doi.org/10.1109/PESS.2002.1043229
Maribo D., Gavrilash M., Reilly P. J. et al. // Proc. of the 56th IEEE Holm Conf. on Electrical Contacts. 2010. P. 1.https://doi.org/10.1109/HOLM.2010.5619461
Liu T., Sen P., Kim C.J. // J. Microelectromech. Syst. 2012. V. 21. № 2. P. 443.https://doi.org/10.1109/JMEMS.2011.2174421
Наумов А.В., Поляков А.В., Сурин М.И., Щерба-ков В.И. // Электричество. 2020. № 4.https://doi.org/10.24160/0013-5380-2020-4-52-55
Наумов А.В., Поляков А.В., Сурин М.И., Щерба-ков В.И. // Электричество. 2021. №7.https://doi.org/10.24160/0013-5380-2021-7-19-25
Naumov A., Polyakov A.V., Surin M.I., Shcherbakov V. // IEEE Trans. Appl. Supercond. 2022.https://doi.org/10.1109/TASC.2022.3153232
Ziegler J.G., Nichols N.B. // Trans. ASME. 1942. V. 64. P. 759.
Лякишев Н.П. Диаграммы состояния двойных металлических систем: Справочник. М.: Машиностроение. 1996. Т. 2.
Дополнительные материалы отсутствуют.
Инструменты
Вестник Военного инновационного технополиса «ЭРА»