

Известия РАН. Механика жидкости и газа, 2023, № 1, стр. 41-53
ИСПОЛЬЗОВАНИЕ ВОЛНОВЫХ ДВИЖИТЕЛЕЙ НА СУДНЕ С МАЛОЙ ПЛОЩАДЬЮ ВАТЕРЛИНИИ
В. В. Прокофьев a, *, Е. А. Архангельский a, А. В. Бойко a, **, Е. В. Филатов a
a МГУ им. М.В. Ломоносова, Научно-исследовательский институт механики
Москва, Россия
* E-mail: vlad.prokof@yandex.ru
** E-mail: mailband@mail.ru
Поступила в редакцию 18.08.2022
После доработки 11.10.2022
Принята к публикации 11.10.2022
- EDN: AJNUBP
- DOI: 10.31857/S0568528122600564
Аннотация
Экспериментально исследуется эффективность волновых движителей (ВД) двух типов (качающееся подпружиненное крыло и прямоточный ВД) на модели судна с малой площадью ватерлинии (СМПВ). В качестве рабочего элемента как качающегося, так и прямоточного ВД использовался профиль NACA0015. В случае прямоточного ВД плоский профиль был жестко закреплен относительно корпуса судна с наклоном хорды крыла 30°. Проведены исследования эффективности работы волновых движителей на волнах различной длины в зависимости от осадки корпусов СМПВ и, в случае качающегося подпружиненного крыла, также от глубины погружения движителя. С использованием результатов буксировочных испытаний проведена оценка силы тяги прямоточного ВД при различных условиях эксплуатации. Обнаружено, что с ростом глубины погружения корпусов судна эффективность прямоточного ВД растет, а качающегося ВД уменьшается, однако он в значительной мере сохраняет работоспособность, при условии, что рабочий элемент ВД остается на оптимальной глубине вблизи от поверхности воды.
Идея использования волновой энергетики моря для движения судов возникла очень давно. Первые упоминания об использовании энергии морских волн для движения судов относятся еще к 19 в. Препятствиями к применению различных волновых движителей (ВД) являются нестабильность параметров реальных морских волн и сильная зависимость эффекта от параметров самого судна и волнового движителя. Тем не менее примеры применения ВД довольно многочисленны – см. [1].
В гидроканале Института механики МГУ модельные испытания судов с ВД проводились с 1989 г. С использованием линейной теории волн и линейной теории качки была предложена математическая модель для расчета тяги волнового движителя с учетом килевой и вертикальной качки судна [2]. Показано, что эффект создания тяги главным образом связан с качкой судна, и наибольшая тяга волнового движителя достигается при длине волны соизмеримой с длиной судна. В [3] представлена схема нового волнового движителя, где механизм тяги связан не с качкой судна, а с опрокидыванием волн при взаимодействии с элементами конструкции ВД. Для проверки возможности использования жестко закрепленной на судне наклонной пластины в качестве волнового движителя судна в Институте механики МГУ была построена модель судна-катамарана длиной более 6 м. Эффект движения судна против волн за счет их опрокидывания на неподвижной относительно судна наклонной пластине успешно продемонстрирован как на устройстве, где качка полностью отсутствовала (тележка на рельсах) [3], так и на длинном катамаране, где отсутствовала килевая качка [4].
Традиционно в качестве волнового движителя используется поворачивающееся крыло симметричного профиля с упругой заделкой (см., например, [5]). В работах [1, 6] приведены результаты сравнительных испытаний трех различных типов волновых движителей – крыльевого движителя, ВД типа подводный парус и прямоточного волнодвижителя на модели катамарана длиной 1.7 м с расстоянием между корпусами 1 м. В отличие от катамарана длиной 6 м [4] здесь наблюдалась значительная килевая качка, что способствовало работе качающихся волновых движителей, но ухудшало эффективность прямоточного. Наличие килевой качки заметно уменьшает максимальную скорость судна оборудованного прямоточным волнодвижителем. Однако применение пластины стабилизатора на корме судна поднимает эффективность волнодвижителя до уровня, полученного в тех же условиях на длинном судне.
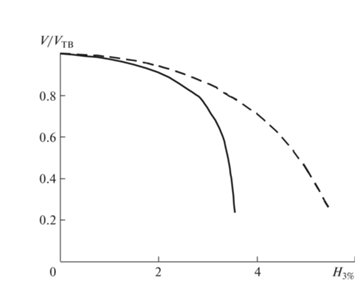
Экспериментальные исследования, проведенные в условиях гидроканалов на пологих волнах [5, 6], показали, что скорость судна, оборудованного крыльевыми волнодвижителями при фиксированной частоте волн, пропорциональна высоте волн. Казалось бы, в штормовых условиях, где амплитуда волн приближается к максимальной, оправдано применение ВД. Однако в штормовых условиях крутизна волн увеличивается, а скорость частиц жидкости на гребнях волн приближается к фазовой скорости волн. Это приводит к значительному увеличению сопротивления для судов, движущихся против волн. На рис. 1 приведен график падения скорости двух судов класса река-море, идущих против волн в зависимости от степени волнения [7]. Эти суда благодаря небольшим габаритам весьма подвержены килевой качке в штормовых условиях. Скорость отнесена к скорости полного хода того же судна на тихой воде VТВ, по горизонтальной оси отложена высота волн так называемой 3% обеспеченности (высота, которую превышают 3 максимальных волны из 100 измеренных).
Рис. 1.
Графики падения скорости некоторых судов класса река-море (судно проекта 0225 – сплошная линия, 1557 – штрихованная), идущих против волн, в зависимости от степени волнения [7].
Используя имеющиеся в литературе данные о характеристиках ветра и штормовых волн по общепринятой шкале Бофорта, можно заключить, что начиная с волнения в 3–4 балла, крутизна волн (отношение высоты волн к их длине) остается стабильной. Скорость ветра (измеряемая как правило на высоте 10 м) для того же диапазона штормовых волн превышает фазовую скорость волн примерно в 2 раза. Так что при не очень развитых надстройках судна штормовые волны вносят значительный вклад в сопротивление судна, движущегося против волн.
Пользуясь графиком рис. 1, можно определить параметры встречных волн, при которых судно полностью теряет скорость. Например, судно класса река-море типа Сибирский (проект 0225) полностью теряет скорость при высоте волн до 3.5 м (длина волн примерно 60 м). Длина судна этого проекта – 129.57 м, осадка – 3.2 м, высота борта – 6 м, мощность – 2 × 662 л.с. То есть, полная остановка судна при двигателях, работающих на полный ход, происходит при взаимодействии с волнами, высота которых порядка осадки судна, а длина в 2 раза меньше длины судна. Для других типов судов класса река-море дело обстоит лучше. Например, судно типа Сормовский (проект 1557, рис. 1) с близкими характеристиками: длина – 114.2 м, осадка – 3.8 м, высота борта – 5.5 м, мощность – 2 × 485 л.с. на тех же волнах (3.5 м) теряет до 20% скорости. Полная же остановка происходит на волнах высотой 5.5 м (длина около 100 м). Высота волн в этом случае превышает осадку судна, а длина примерно равна длине судна – такие параметры обеспечивают интенсивную килевую качку.
Для повышения эффективности работы традиционных волновых движителей требуется увеличение интенсивности волн. Приведенные выше примеры показывают, что в реальных штормовых условиях это связано с увеличением сопротивления при взаимодействии с волнами вплоть до остановки, а затем и дрейфа судна по волнам. Но там, где обычные винты не могут обеспечить движение против волн, волновые движители вряд ли смогут это сделать.
Однако известна конструкция судов мало подверженных воздействию волн, это так называемые суда с малой площадью ватерлинии (СМПВ), также часто их называют полупогруженными катамаранами. В англоязычной литературе такие суда обозначаются как SWATH (Small Waterplane Area Twin Hull). Суда этого типа имеют специальную форму корпуса, расположенную над водой платформу, укрепленную на двух подводных понтонах с помощью нескольких (к примеру, четырех) опор, которые образуют минимальную площадь сечения по ватерлинии. Такая конструкция применяется при постройке быстроходных судов, имеющих малое волновое сопротивление, а также, благодаря малой восприимчивости к воздействию морских волн, используется в конструкциях судов, предназначенных для ведения подводных работ в районах с большими глубинами.
Подводная часть СМПВ обычно выполняется в виде цилиндрической конструкции с носовым и кормовым обтекателями, надводная платформа судна крепится к ним при помощи вертикальных пилонов соответствующего сечения. Такая конструкция опор приводит к сокращению смоченной поверхности, а подводные корпуса-понтоны призваны обеспечивать необходимую остойчивость, запас плавучести и т.д. Суда системы СМПВ имеют большое преимущество в остойчивости, как перед однокорпусными судами, так и перед катамаранами классической схемы. Они могут оставаться стабильными даже при сравнительно сильном волнении. Одно из первых судов, созданных по схеме СМПВ, было опытное судно SSP Kaimalino, построенное в 1973 г. на верфи Coast Guard Yard в г. Кертис Бэй (шт. Мэриленд). Индекс SSP расшифровывается как Semi-Submerged Platform (“Полупогруженная платформа”), а имя “Каималино” было взято из гавайского языка и означало “тихая вода”. СМПВ “Каималино” имело общую длину 26.76 м, ширину 14.2 м и нормальную осадку 4.65 м, подводные корпуса-понтоны имели диаметр 1.98 м, два газотурбинных двигателя мощностью по 5000 л.с. каждый позволяли судну развивать высокие скорости, но в ходе первых испытаний его разогнали только до 22 узлов (40 км/час). При использовании дизельных двигателей (2Х160 л.с.) и экономичной скорости 5 узлов (9 км/час) судно смогло преодолеть до 1500 морских миль без заправки.
В работе исследуется возможность использования волновых движителей для работы на СМПВ. Так как килевая качка на судне такого типа мала, можно предположить, что прямоточный ВД, непосредственно взаимодействующий с опрокидывающимися волнами, будет эффективен. Однако представляет интерес исследование эффективности работы на таком судне и традиционного ВД типа качающееся подпружиненное крыло, так как при небольшом погружении этого ВД имеет место сильное взаимодействие с нестационарным полем течения жидкости.
1. ОПИСАНИЕ МОДЕЛИ СУДНА
Для испытаний в гидроканале была построена модель СМПВ по схеме SSP Kaimalino. Схематический чертеж модели с основными измерениями показан на рис. 2. Двухкорпусная плавающая конструкция состоит из двух полых цилиндрических пластмассовых корпусов-понтонов 1 диаметром 110 мм длиной 1700 мм со съемными носовым и кормовым обтекателями специальной формы (длина цилиндрической части 1380). К каждому корпусу с верхней стороны к специально предусмотренным горизонтальным площадкам с помощью метровых стальных шпилек крепятся два пенопластовых пилона эллиптического сечения (3, оси эллипса 200 и 82 мм, площадь сечения поплавка равна 130 см2). Высота каждого из четырех пилонов модели равна 900 мм. Сверху пенопластовые пилоны, в продольном и поперечном направлениях, связаны между собой прямоугольными деревянными рейками сечением 20 × 70 мм длиной 1200 мм. Эта конструкция и составляет верхнюю площадку 2 модели СМПВ. Расстояние между центрами понтонов – 1160 мм.
Рис. 2.
Схема модели СМПВ: (а) – вид сбоку, (б) – вид спереди; 1 – корпуса-понтоны, 2 – верхняя площадка модели, 3 – пенопластовые пилоны, 4 – проточная часть, формируемая двумя параллельными пластинами.
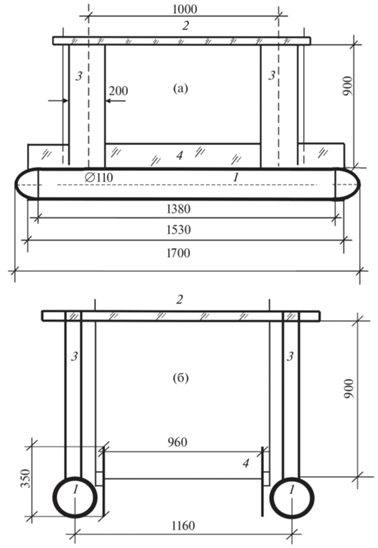
В пространстве между корпусами судна размещена проточная часть 4, формируемая двумя параллельными пластинами из 10 мм оргстекла длиной 1530 мм и высотой 350 мм, расстояние между пластинами 960 мм. В проточной части осуществляется крепление элементов волновых движителей и стабилизатора. На каждом из четырех поплавков модели установлены скобы, позволяющие регулировать положение проточной части относительно корпуса судна по вертикали. В кормовой части установлен горизонтальный стабилизатор – пластина из оргстекла длиной 350 мм (шириной 960 мм) с вылетом за заднюю кромку пластин проточной части на 50 мм. Стабилизатор мог устанавливаться на разной высоте относительно проточной части. При испытании качающегося ВД, стабилизатор был установлен на 50 мм ниже центральной линии проточной части. В качестве рабочего элемента ВД использовался симметричный крыльевой профиль NACA 0015 с длиной хорды 170 мм при ширине профиля 960 мм. Ось вращения профиля (33 мм от передней точки профиля) устанавливалась на уровне центральной линии проточной части, на расстоянии 65 мм от переднего края пластин. Упругая связь профиля осуществлялась с помощью горизонтально натянутых резиновых жгутов – 8 волокон диаметром по 2 мм каждый, длиной 560 мм при натяжении 1.2 кг (в стационарном состоянии). Следует отметить, что площадь ватерлинии (сумма площадей сечений 4 пилонов) составляет 32% от площади крыльевого профиля (в плане) и 15% от площади стабилизатора. Тем самым качка судна здесь определяется в основном характером взаимодействия волн с крылом ВД или со стабилизатором.
В качестве прямоточного ВД использовался тот же крыльевой профиль, но жестко закрепленный между пластинами проточной части, так что ось вращения профиля сместилась на 87 мм вниз относительно средней линии проточной части, при фиксированном наклоне хорды профиля к горизонту 30°.
Слежение за движением судна осуществлялось с помощью луча лазера, закрепленного на верхней площадке на расстоянии 230 мм впереди центра судна.
2. ЗАВИСИМОСТЬ СКОРОСТИ ДВИЖЕНИЯ МОДЕЛИ СМПВ С КРЫЛЬЕВЫМ ВД ОТ ОСАДКИ СУДНА
Проведена серия испытаний модели с использованием подпружиненного жесткого крыльевого профиля NACA 0015.
Использовалась методика эксперимента, описанная в работах [3, 4, 6]. Клиновой волнопродуктор канала был установлен на максимальную амплитуду качания. Уровень воды в канале составлял 950 мм. Графики изменения высоты и длины волн в зависимости от частоты были приведены ранее [6].
Испытания проводились в диапазоне частот 0.45–0.9 Гц, в котором амплитуда волн монотонно увеличивается с ростом частоты, а длина волн уменьшается, но при этом превосходит длину модели и приближается к ней только в конце диапазона (при частоте f = 0.9 Гц, длина волны 1.9 м).
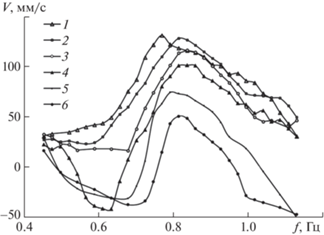
На рис. 3 представлены зависимости скорости движения модели против волн от их частоты при неизменном заглублении 50 мм оси крыльевого движителя (расстоянии от поверхности воды до оси профиля в состоянии покоя) для различных величин осадки модели судна. Осадка определялась по положению относительно спокойной поверхности воды. Наименьшая осадка достигалась при пустых понтонах – 95 мм (кривая 1). В этом случае корпуса понтонов возвышаются над невозмущенной поверхностью воды на 15 мм (т.е. имеем обычный катамаран). Для остальных случаев понтоны находились под водой. Кривые 2–5 на рис. 3 соответствуют величинам осадки судна 210, 343, 660, 780 мм. Видно, что наибольшая скорость в исследованном диапазоне параметров волн достигается для плавающего на поверхности катамарана (кривая1 на рис. 3). С погружением понтонов под поверхностью воды максимальная скорость движения судна против волн уменьшается. Однако даже при значительном погружении понтонов (порядка половины длины судна, кривая 5) максимальная скорость судна снижается всего на 32%. Рабочий диапазон волн с увеличением осадки увеличивается, так что на длинных волнах полупогруженное судно уже имеет большое преимущество перед обычным катамараном. Этот эффект хорошо виден на рис. 4, для длинных волн (кривые 1 и 2, отношение длины волны к длине судна $\lambda {\text{/}}{{L}_{s}}$= = 2.54 и 2.26 соответственно) с ростом глубины погружения скорость судна растет, а для более коротких (кривые 3–5 для $\lambda {\text{/}}{{L}_{s}}$ = 2, 1.61, 1.45 соответственно) убывает. Следует учитывать, что крутизна волн (отношение высоты волны к ее длине) в представленных экспериментах с ростом частоты волн растет. Для кривых 1–5 крутизна волн равна 0.019, 0.024, 0,03, 0.044, 0.053 соответственно. Различие крайних значений диапазона исследованных волн по крутизне 2.8 раза. Как было отмечено во введении, штормовые волны имеют примерно постоянную крутизну. С ростом амплитуды при постоянной длине волны скорость движения судна растет примерно пропорционально высоте волн (см. [6]). Подобный результат получен также в работе [5], где измерялось тяговое усилие аналогичного подпружиненного крыльевого движителя “на швартовых”. Если данные рис. 4 пересчитать на волны одинаковой крутизны (напр., 0.05, близкую к крутизне штормовых волн), то скорость движения СМПВ, оборудованного крыльевым ВД, на длинных волнах (кривые 1 и 2 рис. 4) с увеличением погружения корпусов становиться выше, чем на обычном катамаране с плавающими корпусами.
3. ВЛИЯНИЕ ГЛУБИНЫ ПОГРУЖЕНИЯ ВОЛНОВОГО ДВИЖИТЕЛЯ
Эффект создания тяги крыльевым качающимся ВД может быть связан как с качкой системы корпус судна – волнодвижитель, так и с непосредственным взаимодействием качающегося профиля крыла с полем течения жидкости в отсутствие качки судна. При значительной осадке корпусов их влияние на качку судна ослаблено. В волновом канале Института механики МГУ были проведены исследования влияния глубины погружения крыльевого волнового движителя на скорость движения модели СМПВ против волн. Выбран вариант большой осадки СМПВ, для которого небольшие изменения величины осадки судна мало влияют на эффект движения против волн. Изменение вертикального положения оси крыла производилось путем вертикального перемещения проточной части модели (см. рис. 2). Вместе с проточной частью погружался и жестко соединенный с ней стабилизатор. В табл. 1 приведены значения заглубления оси профиля качающегося ВД и осадки судна.
Таблица 1
| № кривой рис. 5 | 1 | 2 | 3 | 4 | 5 |
| Заглубление оси ВД (мм) | 0 | 50 | 105 | 150 | 220 |
| Осадка судна (мм) | 720 | 660 | 616 | 580 | 580 |
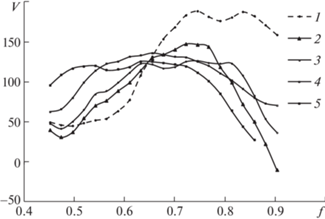
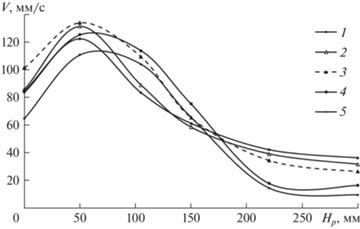
Соответствующие зависимости скорости от частоты волн для различных глубин погружения оси профиля относительно невозмущенной поверхности (заглубления) ВД представлены на рис. 5. Кривая 1 соответствует положению оси профиля на уровне невозмущенной жидкости. Видно, что во всем диапазоне частот волн максимальная скорость достигается при Hp = 50 мм, при дальнейшем увеличении заглубления оси профиля эффективность ВД уменьшается. Наличие оптимального для работы ВД заглубления видно из показанных на рис. 6 зависимостей скорости движения судна от заглубления оси профиля Hp при фиксированных параметрах волн.
Рис. 5.
Зависимость средней скорости движения судна против волн от их частоты при большой осадке судна для различных заглублений оси профиля: 1 – 0 мм, 2 – 50 мм, 3 – 105 мм, 4 – 150 мм, 5 – 220 мм.
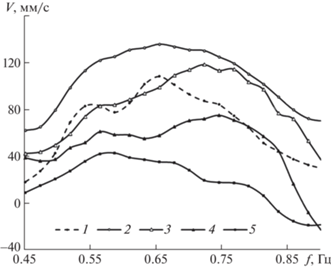
Рис. 6.
Зависимость скорости движения судна против волн от заглубления оси профиля Hp:1 – 0.56 Гц, 2 – 0.61 Гц, 3 – 0.69 Гц, 4 – 0.75 Гц, 5 – 0.91 Гц.
Интересно сравнить характеристики хода судна с параметрами качки. Для оценки качки проводились измерения вертикального перемещения луча лазера, установленного на верхней палубе судна на расстоянии 230 мм впереди среднего сечения судна. На рис. 7 приведены данные для среднего размаха вертикальных колебаний лазера As, для того же набора частот, что указаны на рис. 6. В этом эксперименте при погружении на глубину проточной части погружаются и связанные с ней крыльевой профиль и стабилизатор. В результате качка монотонно уменьшается с увеличением глубины погружения. В отличие от графиков скорости хода максимум качки наблюдается при нулевом заглублении оси профиля. Это можно объяснить тем, что при нулевом заглублении оси профиля стабилизатор, расположенный на 50 мм ниже оси профиля, находится в области интенсивного взаимодействия с волнами. Однако возбуждаемая при этом качка судна не приводит к увеличению тяги ВД, из-за невыгодного взаимодействия профиля с поверхностью воды.
При обосновании принципа работы подпружиненного крыльевого ВД как правило рассматривают два предельных случая – подпружиненное крыло с неподвижной относительно физической системы координат осью в поле течения волны или профиль, совершающий машущие колебания, связанные с качкой судна, в неподвижной жидкости. Реально оба фактора действуют одновременно, причем особое значение в механизмах создания тяги может иметь фаза колебаний оси профиля по отношению к фазе волны. Считаем, что по размаху вертикальных колебаний луча лазера As можно характеризовать качку судна. Введем величину Vp = As f (где f – частота волнопродуктора), которую можно считать характеристикой интенсивности работы машущего движителя на спокойной воде. На рис. 8 а показаны зависимости пронормированных по максимальной величине средней скорости движения судна против волн V и величины Vp от длины волны, отнесенной к длине судна. Кривые 1 и 2 относятся к движению модели СМПВ с осадкой 95 мм (т.е. с плавающими корпусами). Видно, что в рабочем для этого ВД диапазоне относительных длин волн $\lambda {\text{/}}{{L}_{s}}$ от 1 до 2.5, зависимости (1 и 2) коррелируются. Кривые 3 и 4 на рис. 8 а отвечают аналогичным зависимостям, полученным в [6], с тем же волновым движителем c натяжением резиновых тяг –1000 г, заглублением оси 250 мм, с кормовой пластиной длиной 160 мм и заглублением 100 мм для легкого плавающего катамарана. В [6] также наблюдалась корреляция между скоростью движения судна против волн и интенсивностью качки, на основании чего сделан вывод о том, что эффект движения в основном связан с качкой судна.
Рис. 7.
Зависимость среднего размаха вертикальных колебаний лазера As. от заглубления профиля для того же набора частот волн, что и на рис. 6.
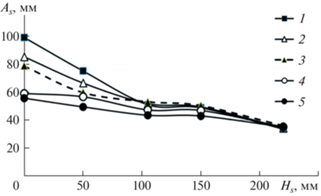
Рис. 8.
Зависимости пронормированных по максимальному значению скорости судна V/Vmax и величины Vp/Vp max от относительной длины волн $\lambda {\text{/}}{{L}_{s}}$. а) кривые 1, 2 для СМПВ с осадкой 95 мм, 3, 4 для плавающего катамарана (см. [4]), б) кривые 1, 2 (качка, скорость) для СМПВ с осадкой 780 мм.

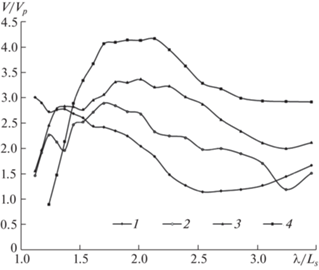
В случае СМПВ и корпусами, находящимися на глубине, качка в основном определяется взаимодействием с волнами крыльевого ВД и стабилизатора. На рис. 8б приведены аналогичные приведенным выше данные для заглубленных корпусов СМПВ (осадка 780 мм, заглубление оси профиля ВД 50 мм). Зависимости 1 и 2 отличаются существенно – максимумы скорости судна и сопоставляемого машущего движителя сильно разнесены по длине волн. Добавим к этому следующие соображения: на рис. 9 представлены зависимости отношения скорости движения судна V к величине Vp от относительной длины волн для различных величин осадки судна. Заглубление оси профиля ВД и стабилизатора оставалось постоянным (50 и 100 мм соответственно), таким образом, если бы источником тяги были машущие движения профиля, то величина интенсивности работы такого движителя Vp и определяла бы скорость движения судна. Кривые 1–4 рис. 9 соответствуют осадке судна 95 (плавающие корпуса), 490, 660 и 780 мм. Отношение V/Vp значительно возрастает с увеличением осадки судна (порядка двух раз). Вряд ли это можно связать с увеличением эффективности работы ВД в режиме машущего движителя. Скорее всего, с уменьшением качки корпусов судна в механизме создания тяги крыльевого ВД возрастает доля, связанная с непосредственным взаимодействием неравномерного поля течения жидкости с крыльевым профилем.
4. ПРЯМОТОЧНЫЙ ВОЛНОВОЙ ДВИЖИТЕЛЬ
В волновом движителе с качающимся подпружиненным профилем тяга создается за счет подъемной силы крыла при его обтекании жидкостью. В прямоточном ВД работает другой механизм. В качестве ВД ранее [3] использовалась наклонная пластина, укрепленная между корпусов судна-катамарана. Опрокидывающиеся на пластине волны создают повышенный уровень жидкости за пластиной. В работе [4] расчетным путем показано, что в процессе взаимодействия волн с пластиной профили давления на передней и задней поверхности пластины близки к гидростатическим. Наибольшая сила тяги возникает в момент начала взаимодействия подошвы волны с передней поверхностью пластины (наибольшая разность уровней жидкости на передней и задней поверхностях пластины). Эффект усиливается наличием боковых пластин (в нашем случае эту роль играют пластины проточной части модели – рис. 2 а, б.). Проведенные ранее исследования [4] показали, что верхняя кромка пластины прямоточного ВД должна быть установлена примерно на уровне невозмущенной жидкости, наклон пластины от 20 до 45°, длина пластины должна обеспечивать надежное погружение нижней кромки в жидкость в момент взаимодействия с подошвой волны (в противном случае теряется весь эффект).
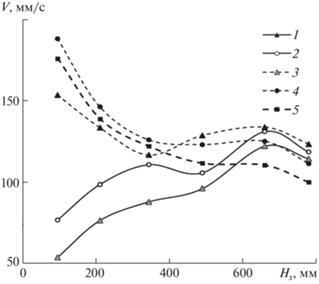
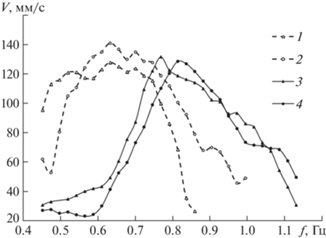
В случае СМПВ в качестве рабочего органа прямоточного ВД использовался тот же профиль NACA 0015 с хордой 170 мм, жестко закрепленный в проточной части модели, с наклоном хорды к горизонту 30°. При этом точка, соответствующая оси вращения (в варианте машущего крыла), сместилась на 87 мм вниз относительно средней линии проточной части. Во всех экспериментах проточная часть устанавливалась таким образом, чтобы кромка крыла находилась на невозмущенной поверхности жидкости. Глубина погружения кормовой пластины-стабилизатора составляла 50 или 500 мм. На рис. 10 представлены зависимости скорости движения СМПВ против волн от частоты при различной осадке корпусов судна. Заглубление стабилизатора для всех случаев 500 мм. Видно, что эффективность ВД сильно зависит от осадки судна, причем, в отличие от крыльевого ВД, эффективность растет с увеличением осадки.
Рис. 10.
Зависимости скорости движения СМПВ с прямоточным ВД против волн от частоты при различной осадке корпусов судна: 1–6 соответствуют осадке 770, 660, 500, 435, 305 и 170 мм. Заглубление стабилизатора 500 мм.
Изменения амплитуды качки показали, что для прямоточного ВД в рабочей области движителя (частоты волн 0.7–1 Гц) качка слабо зависит от осадки. Так, размах качки для минимальной и максимальной исследованных в эксперименте значений осадки (170 и 770 мм) отличается всего на несколько процентов, в то время как скорость движения для тех же значений осадок судна различается примерно в 2.5 раза (на максимуме). Сравнительные исследования скорости судна для двух заглублений кормовой пластины – стабилизатора (50 и 500 мм) не показали большого различия, хотя в большинстве опытов увеличение заглубления стабилизатора уменьшает качку судна и несколько увеличивает скорость хода против волн.
На рис. 11 приведено сравнение скорости движения судна с характерной для СМПВ осадкой для крыльевого ВД (заглубление оси профиля 50 мм, кривые 1, 2) и для прямоточного ВД (кривые 3, 4). Видно, что максимальные скорости для прямоточного ВД при больших осадках лишь немного уступают крыльевому ВД. Однако максимумы скорости значительно сдвинуты в сторону более коротких волн. Два типа ВД как бы дополняют друг друга – причем технически из качающегося профиля сделать фиксированный несложно, но при такой модернизации значительно расширяется диапазон рабочих частот ВД.
5. ОЦЕНКА ТЯГИ ПРЯМОТОЧНОГО ВД
На гидроканале Института механики МГУ в одинаковых волновых условиях (ход клина волнопродуктора максимальный) для близких параметров прямоточных ВД, но для различных моделей судов, получена информация об эффективности работы движителя (см. [4, 6]). Но так как модели судов имели различное сопротивление, трудно провести сравнение эффективности работы ВД на этих судах.
Сравнительную оценку тяги ВД на различных моделях судов проведем на основании буксировочных испытаний моделей СМПВ и катамарана длиной 1.7 м [6] в канале с покоящейся водой. Дополнительным сопротивлением при взаимодействии моделей с волнами пренебрежем (считаем волны достаточно пологими). На рис. 12 кривая 1 (аппроксимация экспериментальных точек квадратичным полиномом) – зависимость силы сопротивления от скорости буксировки для катамарана длиной 1.7 м в отсутствие пластины прямоточного ВД. Кривые 2 и 3 для модели СМПВ с осадкой 0.755 и 0.205 м, соответственно, с закрепленным в проточной части крылом прямоточного ВД.
Рис. 12.
Результаты буксировочных испытаний моделей СМПВ и катамарана длиной 1.7 м в канале, кривые – квадратичные аппроксимации и результаты пересчетов: 1 – катамаран длиной 1.7 м без ВД; 2, 3 – модель СМПВ с осадкой 0.205 и 0.755 м; 4, 5 – катамараны длиной 1.7 и 6 м с ВД.
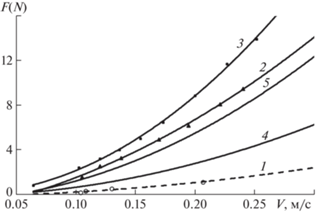
Из сравнения кривых 2 и 3 видно, что с увеличением осадки сопротивление заметно растет. Примем за эффективную силу тяги – силу сопротивления при равномерной буксировке со скоростью, соответствующей средней скорости движения судна против волн. На основании данных рис. 10 – при осадке 0.77 м модель СМПВ развивала максимальную скорость 0.132 м/с при частоте волн 0.77 Гц, из данных рис. 12 следует, что сила сопротивления при буксировке с такой скоростью равна 3.75 Н. Максимальная скорость для осадки 0.305 м, равная 0.075 м/с, достигается при близкой к предыдущему случаю частоте волн 0.79 Гц, соответствующее сопротивление равно 0.56 Н, т.е. почти в 7 раз меньше, чем при осадке 0.77 м. Отсюда можно заключить, что эффективная тяга прямоточного движителя с увеличением осадки при одинаковых параметрах волн увеличилась также в 7 раз.
Для модели катамарана длиной 1.7 м сопротивление модели с наклонной пластиной будем считать равным сопротивлению катамарана без ВД (кривая 1, рис. 12) плюс сопротивление пластины длиной 200 мм, с наклоном 30° (кривая 4, рис. 12). При расчете сопротивления 6-ти метрового катамарана (длина 6000 мм, пластина – волнодвижитель длины 200 мм с наклоном 36° расположена в среднем сечении – см. [4]) приближенно будем считать, что сопротивление корпуса растет пропорционально длине корпусов судна, к нему прибавляется сопротивление пластины длиной 200 мм с наклоном 36° (кривая 5).
Оценим работу прямоточного ВД для этих трех различных моделей. Выше уже было получено, что для модели СМПВ при частоте 0.77 Гц (максимум скорости) эффективная тяга составляет 3.73 N, для катамарана длиной 1.7 м при частоте волн 0.75 Гц достигалась скорость 0.154 м/с (см. [6]), это соответствует эффективной тяге (см. рис. 12) 1.92 N. Для 6-ти метрового катамарана при близкой частоте 0.77 Гц скорость составляла 0.126 м/с (см. [4]), что соответствует эффективной тяге 2.07 N. Максимум скорости (0.172 м/с) для 6 м катамарана достигается при частоте волн 0.65 Гц, которому соответствует эффективная тяга 4 N.
Итак, наименьшая в этих оценках эффективная тяга прямоточного ВД получилась для 1.7 метрового катамарана, где фиксировалась и максимальная качка. На длинном катамаране и на модели СМПВ с большой осадкой корпусов, где качка значительно меньше, эффективная тяга прямоточного ВД значительно увеличилась (до 2 раз).
ЗАКЛЮЧЕНИЕ
На волновом канале Института механики МГУ проведены две серии испытаний модели судна с малой площадью ватерлинии (СМПВ), оборудованного в первой серии волновым движителем типа машущее крыло с использованием подпружиненного жесткого крыльевого профиля NACA 0015. Во второй серии тот же профиль, жестко закрепленный между корпусами судна, использовался в качестве рабочего элемента прямоточного ВД.
Наибольшая эффективность ВД типа качающегося крыла наблюдается для плавающих корпусов судна при наибольшей качке, для волн, длина которых порядка длины судна. При больших осадках судна (корпуса расположены ниже поверхности воды), характерных для СМПВ, этот ВД в значительной мере сохраняет работоспособность, при условии, что рабочий элемент ВД остается на оптимальной глубине вблизи от поверхности воды. При этом рабочий диапазон волн для погруженных корпусов увеличивается так, что для низких частот (длина волн превосходит длину судна более чем в 2 раза) эффективность движителя становится даже выше, чем для плавающих корпусов.
Испытания прямоточного ВД показали, что его эффективность, в отличие от крыльевого ВД, растет с увеличением осадки во всем исследованном диапазоне длин волн. При осадке, характерной для СМПВ, максимальные скорости для прямоточного ВД лишь немного уступают крыльевому ВД при той же осадке. Однако максимумы скорости для прямоточного ВД значительно сдвинуты в сторону более коротких волн.
На основании буксировочных испытаний моделей судна с малой площадью ватерлинии и катамарана в канале с покоящейся водой проведена оценка тяги прямоточного ВД для трех различных моделей. Оказалось, что на коротком – 1.7 метровом катамаране, где наблюдалась сильная килевая качка, тяга значительно (примерно в 2 раза) меньше, чем на катамаране длиной 6 м и на СМПВ с большой осадкой корпусов, где интенсивность качки значительно уменьшена.
Авторы выражают благодарность ведущим инженерам лаборатории № 105 Института механики МГУ А.Ю. Якимову и А.А. Пучкову, проведших буксировочные испытания моделей.
Список литературы
Прокофьев В.В., Филатов Е.В., Такмазьян А.К., Якимов А.Ю. Сравнительные исследования эффективности судовых волновых движителей различных типов // Инженерный журнал: наука и инновации. 2018. № 3. С. 1–17.
Константинов Г.А., Якимов Ю.Л. Расчет тяги движителя судна, использующего энергию морских волн // Изв. РАН. МЖГ. 1995. № 3. С. 139–143.
Очеретяный С.А., Прокофьев В.В., Такмазьян А.К., Филатов Е.В. Воздействие волн на погруженную в жидкость подвижную пластину: физический и численный эксперимент // Изв. РАН. МЖГ. 2013. № 4. С. 27–34.
Прокофьев В.В., Такмазьян А.К., Филатов Е.В. Испытание и расчет движения модели судна c прямоточным волновым движителем // Изв. РАН. МЖГ. 2017. № 4. С. 24–38.
Глушко В.Н. Исследование влияния параметров морского волнения на величину тяги, создаваемой волновым движителем в виде колеблющегося крыла с упругой заделкой // Прикладная гидромеханика. 2009. Т. 11. С. 47–53.
Прокофьев В.В., Такмазьян А.К., Филатов Е.В. // Результаты испытаний судна с различными волновыми движителями в гидроканале // Изв. РАН. МЖГ. 2019. № 6. С. 38–47.
Егоров Г.В. Проектирование и постройка коастеров и судов смешанного плавания. Одесса.: Издатель Николай Дубров. МИБ, 2008. 128 с.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Механика жидкости и газа