

Известия РАН. Механика жидкости и газа, 2023, № 1, стр. 115-126
ДВИЖЕНИЕ ПОРШНЯ, РАЗДЕЛЯЮЩЕГО МАГНИТНУЮ И НЕМАГНИТНУЮ ЖИДКОСТИ, В МАГНИТНОМ ПОЛЕ
У. В. Волкова a, *, Д. И. Меркулов a, С. А. Калмыков a, Д. А. Пелевина a, В. А. Налетова a
a МГУ им. М.В. Ломоносова
Москва, Россия
* E-mail: lvioolnk@mail.ru
Поступила в редакцию 10.07.2022
После доработки 11.10.2022
Принята к публикации 11.10.2022
- EDN: AJJFHX
- DOI: 10.31857/S0568528122600485
Аннотация
Теоретически и экспериментально исследовано перекачивание немагнитной жидкости с помощью насоса-дозатора на основе магнитной жидкости, содержащей тело из намагничивающегося материала. Изучен процесс перекачивания жидкости в приложенном вертикальном однородном магнитном поле. Вычислены и измерены зависимости высоты поднятия поршня, разделяющего магнитную и немагнитную жидкости, от времени в постоянном и ступенчатом магнитном поле. Получено хорошее совпадение теории и эксперимента. Вычислена зависимость времени подъема поршня от величины постоянного магнитного поля. Теоретически исследовано движение поршня при выключении магнитного поля.
Магнитная жидкость – это коллоидный раствор ферромагнитных частиц микро и наноразмеров в несущей жидкости. Основы физики и гидродинамики магнитной жидкости и двухфазных магнитных систем изложены в [1–3]. В [4] изложены различные модели магнитной жидкости и приведены решения классических задач феррогидродинамики. Изменение формы поверхности магнитной жидкости в неоднородных магнитных полях может применяться в технике, в частности, при создании насосов, дозаторов и клапанов.
Методы определения статической формы свободной поверхности магнитной жидкости предложены в [5, 6]. В работе [5] представлены результаты численного расчета формы свободной поверхности капли магнитной жидкости, удерживаемой магнитным полем намагничивающего клина на наклонной плоскости, а также формы свободной поверхности бесконечного объема магнитной жидкости, расположенной около острия клина, при увеличении внешнего поля. В работе [6] проведены экспериментальные и теоретические исследования деформации поверхности магнитной жидкости, содержащей намагничивающийся цилиндр, в однородном приложенном магнитном поле разного направления. В работах [7, 8] рассмотрена динамика формы поверхности тонкого слоя магнитной жидкости в поле проводника с током [7] и формы поверхности капли вязкой магнитной жидкости, во вращающемся однородном магнитном поле [8].
В [9–11] экспериментально и теоретически исследован линейный перистальтический насос на основе магнитной жидкости. Перекачивание происходит за счет волнообразной деформации поверхности магнитной жидкости в переменных периодических магнитных полях системы электромагнитов. В [12, 13] разработан перистальтический насос на основе магнитной жидкости в бегущем магнитном поле вращающегося постоянного магнита. Из-за вращения магнита происходит течение магнитной жидкости и перекачивание немагнитной жидкости. В [14] предложен перистальтический насос на основе волнообразной деформации поверхности магнитной жидкости и упругой мембраны в пульсирующем периодическом магнитном поле. В [15] аналитически получено существование ненулевого среднего расхода при двухслойном течении вязких несжимаемых жидкостей, с разными магнитными свойствами, в неоднородном бегущем магнитном поле, которое может быть создано при помощи движущихся намагничивающихся тел в однородном постоянном приложенном магнитном поле.
В работе [16] представлен прототип пипетки, в котором объем магнитной жидкости использован в качестве поршня, положением которого управляет электромагнит. В прототипе, описанном в [17], поршень из магнитной жидкости перемещается при помощи постоянного магнита. В [18] теоретически рассмотрено движение поршня из магнитной жидкости в цилиндрическом канале в поле магнитного диполя. В работах [19, 20] представлен прототип насоса, в котором деформация капель магнитной жидкости в поле нескольких электромагнитов использована как для создания поршня, так и клапанов, предотвращающих обратный ток перекачиваемой жидкости. В прототипе [21] клапаны и поршень реализованы при помощи перемещения капель магнитной жидкости постоянными магнитами. В [22–24] экспериментально исследована работа схожих прототипов насоса с сосудом особой формы, в котором объем магнитной жидкости вращается постоянным магнитом и перекачивает немагнитную жидкость.
В работах, приведенных выше, описаны насосы, управляемые неоднородным магнитным полем, создаваемым при помощи постоянных магнитов или электромагнитов. При таком способе создания поля трудно уменьшить размер устройства и необходим подвод энергии к магнитам. В отличие от этих работ в данной статье использовано внешнее однородное управляющее магнитное поле, а неоднородность магнитного поля создается хорошо намагничивающимся телом внутри магнитной жидкости. Это позволяет создать насосы-дозаторы малых размеров для перекачивания небольших объемов жидкости.
В статье теоретически и экспериментально исследовано движение поршня, разделяющего магнитную и немагнитную жидкости в однородном вертикальном приложенном магнитном поле. Магнитная жидкость содержит сферическое тело из хорошо намагничивающегося материала. Объем жидкостей в кювете в приложенном магнитном поле может меняться за счет притока или оттока жидкостей через тонкие каналы круглого сечения. При включении поля магнитная жидкость поднимает поршень и вытесняет немагнитную жидкость, а при выключении магнитного поля поршень опускается. Теоретически и экспериментально показана возможность использования магнитной жидкости, содержащей тело из намагничивающегося материала, для перекачивания и дозирования немагнитной жидкости в однородном магнитном поле.
1. ЭКСПЕРИМЕНТ
Пусть магнитная жидкость находится в закрытом сверху цилиндрическом сосуде f радиуса Rv, полностью покрывает сферическое тело с магнитной проницаемостью μb из намагничивающегося материала радиуса Rb, закрепленное в центре дна сосуда, а также полностью смачивает поршень (массой Mp, площадью Sp, толщиной dp), разделяющий магнитную и немагнитную жидкости (см. рис. 1). Введем вертикальную ось z, которая проходит через ось цилиндрического сосуда. В центре сферического тела z = 0. Далее индексы p, b, s, f обозначают параметры поршня, сферического тела, перекачиваемой жидкости, магнитной жидкости. Магнитная жидкость в сосуде f сообщается с открытой кюветой ff по каналу 2 (радиуса r2, длиной l2 и площадью S2= π$r_{2}^{2}$). Ось канала 2 расположена на высоте z = Rb. Кювета ff имеет радиус Rff, площадь Sff и наполнена магнитной жидкостью до уровня z = hff(t). Поверх поршня в сосуде f налита немагнитная жидкость. Немагнитная жидкость может вытекать по каналу 1 (радиуса r2, длиной l1 и площадью S1= π$r_{2}^{2}$). Координата z оси канала 1 обозначена hc. Канал 1 отделяется от сосуда f клапаном. В начальный момент времени масло налито до сливного отверстия и полностью заполняет сливной канал 1. Эксперимент проводился при параметрах, указанных в табл. 1.
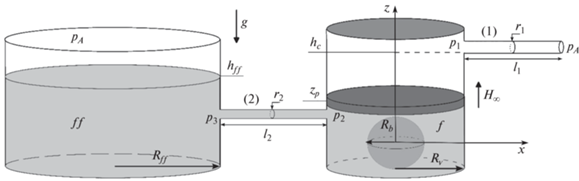
Таблица 1.
Параметры экспериментальной установки и жидкостей, использованных в эксперименте
| Магнитная жидкость | Немагнитная жидкость | Намагничивающееся тело |
|---|---|---|
| ρf = 1.1 г/см3 | ρs = 0.87 г/см3 | Rb = 0.6 см |
| μf = 1.3 | μs = 1 | μb = 100 |
| ηf = 0.01 П | ηs = 0.02 П | |
| Поршень | Размеры установки | |
| Mp = 0.25 г | hc = 2 см | ${{R}_{{v}}}$ = 0.615 см |
| Sp = 1.16 см3 | z0 = 0.68 см | Sff = 11.946 см2 |
| dp = 0.3 см | l1 = 2.8 см, l2 = 28.5 см | r1,2 = 0.155 см2 |
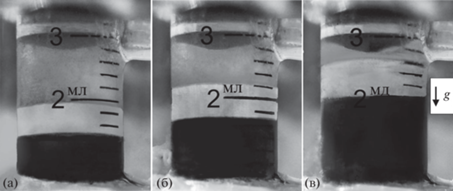
В эксперименте была использована магнитная жидкость на основе воды с магнетитовыми микрочастицами и вазелиновое масло в качестве перекачиваемой немагнитной жидкости. Цилиндрический сосуд f помещается в центр системы катушек в область однородного поля. Однородное вертикальное магнитное поле H∞ создается электромагнитными катушками Гельмгольца радиуса RH ≫ ${{R}_{{v}}}$. Кювета ff находится вне действия магнитного поля катушек. При включении магнитного поля уровень магнитной жидкости в сосуде f над сферическим телом увеличивается из-за притока магнитной жидкости из кюветы ff по каналу 2, поршень поднимается, и немагнитная жидкость вытекает из канала 1 (см. рис. 2). На рис. 2 представлены фотографии равновесного положения поршня (поршень покрашен в белый цвет) при разных полях H∞.
Рис. 2.
Фотографии кюветы f экспериментального прототипа: H∞ = 0,100, 200 Э (а, б, в). В экспериментальной кювете на фотографиях: серая область – немагнитная жидкость, белая область – поршень, черная область – магнитная жидкость.
Постоянное магнитное поле. При включении постоянного магнитного поля H∞ = 100 Э поршень начинает подниматься и через некоторое время tp занимает равновесное положение. Процесс подъема поршня фиксируется на камеру. Раскадровка видео позволяет построить график зависимости zp от времени t, который изображен на рис. 3a точками.
Рис. 3.
Зависимость координаты zp от времени t (точки – эксперимент, линия – теория): при постоянном магнитном поле H∞ = 100 Э (а), при ступенчатом магнитном поле (ΔH∞= 6.2 Э, Δt = 75 c) (б).
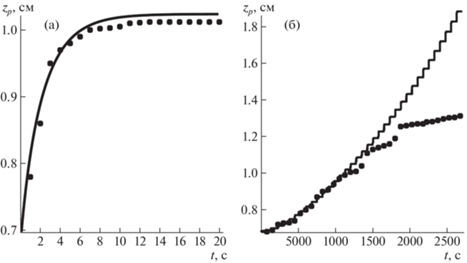
Ступенчатое магнитное поле. В этой серии экспериментов использовалось переменное ступенчатое магнитное поле: постоянное магнитное поле удерживается в течение Δt = 75 c, затем увеличивается на ΔH∞ = 6.2 Э. Магнитное поле увеличивалось до максимального значения Hmax = 223 Э, при котором поршень находится на уровне сливного отверстия. В эксперименте на каждом шаге по полю, когда устанавливается равновесное положение поршня, делается фотография. После обработки фотографий эксперимента построена экспериментальная зависимость вертикальной координаты поршня zp от времени t, эта зависимость обозначена точками на рис. 3б.
Таким образом, экспериментально показана возможность использования магнитной жидкости, содержащей тело из намагничивающегося материала, для перекачивания и дозирования немагнитной жидкости, а также возможность управления работой прототипа с помощью однородного магнитного поля.
2. МОДЕЛИРОВАНИЕ ДВИЖЕНИЯ ПОРШНЯ, РАЗДЕЛЯЮЩЕГО МАГНИТНУЮ И НЕМАГНИТНУЮ ЖИДКОСТИ
Постановка задачи. Рассмотрим задачу о движении поршня, разделяющего магнитную и немагнитную жидкости, в приложенном однородном вертикальном магнитном поле H∞. В начальный момент времени включается однородное вертикальное магнитной поле напряженностью H∞ и открывается клапан в канале 1. При включенном поле поршень из-за магнитных сил начинает двигаться вверх, тем самым выталкивая немагнитную жидкость в сливной канал 1. Далее в некоторый момент времени tp магнитное поле выключается H∞ = 0, а клапан в канале 1 закрывается. При выключенном поле поршень опускается и сверху осуществляется залив перекачиваемой жидкости. Положение поршня в любой момент времени определяет координата его контакта с магнитной жидкостью – zp. Сделаем следующие предположения: намагниченность магнитной жидкости линейно зависит от напряженности магнитного поля Mf = χfH, χf = const (μf = 1 + 4πχf); намагниченность окружающей среды равна нулю Ms = 0, χs = 0; намагниченность тела линейно зависит от напряженности магнитного поля Mb = χbH, χb = const (μb = 1 + 4πχb). Задача решается c учетом силы тяжести, в безындукционном приближении χf ≪ 1.
Закон движения поршня имеет вид:
(1)
${{M}_{p}}{{\ddot {z}}_{p}} = - {{M}_{p}}g + {{S}_{p}}\left( {{{p}_{f}}\left( {z = {{z}_{p}}} \right) - {{p}_{s}}\left( {z = {{z}_{p}} + {{d}_{p}}} \right)} \right) + \mathop \smallint \limits_{{{S}_{p}}}^{} \left[ {{{\tau }_{{zz}}}} \right]_{f}^{s}{{\left. \right|}_{{z = {{z}_{p}}}}}dS$Тензор напряжений в невязких жидкостях имеет вид:
(2)
${{p}_{{ij}}} = - p{{g}_{{ij}}} + {{\tau }_{{ij}}},\quad {{\tau }_{{ij}}} = \frac{{{{H}_{i}}{{B}_{j}}}}{{4\pi }} - \frac{{HB}}{{8\pi }}{{g}_{{ij}}}$До момента включения магнитного поля жидкости находятся в покое и в равновесии. Координату поршня zp, координату поверхности жидкости в кювете ff и скорость поршня в начальный момент t = 0 обозначим следующим образом:
(3)
$t = 0{\text{\;}}:{{z}_{p}} = {{z}_{0}},\quad {{h}_{{ff}}} = {{h}_{{ff0}}},\quad {{\dot {z}}_{p}} = 0$Отметим, что hff0 зависит от начального положения поршня z0 ≥ Rb, высоты сливного отверстия hc, до которого налита немагнитная жидкость, и других параметров задачи следующим образом:
(4)
${{h}_{{ff0}}} = {{z}_{0}}\left( {1 - \frac{{{{\rho }_{s}}}}{{{{\rho }_{f}}}}} \right) + ({{h}_{c}} - {{d}_{p}})\frac{{{{\rho }_{s}}}}{{{{\rho }_{f}}}} + \frac{{{{M}_{p}}}}{{{{\rho }_{f}}{{S}_{p}}}}~$На поверхности раздела магнитной жидкости и поршня при z = zp за счет скачка магнитных свойств среды существует скачок тензора Максвелловских напряжений τij. Скачок τzz при z = = zp с учетом непрерывности вектора Hτ и компоненты Bn в безындукционном приближении имеет вид [4]:
(5)
$\left[ {{{\tau }_{{zz}}}} \right]_{f}^{s}\left( {z = {{z}_{p}}} \right) \approx \frac{{{{\mu }_{f}} - 1~}}{{8\pi }}{{H}^{2}}\left( {z = {{z}_{p}}} \right)$При расчетах в сосудах ff и f пренебрегаем течением жидкостей, так как скорость в данных сосудах мала (${{R}_{{v}}}$ ≫ max (r2, r2)). Уравнения гидростатики жидкостей в сосуде f при χi = const имеют вид:
Проинтегрировав уравнения (6), получим формулу для давлений в жидкостях в сосуде f:
С учетом (2), (5), (7) уравнение движения поршня (1) может быть записано в виде
(8)
${{M}_{p}}{{\ddot {z}}_{p}} = - {{M}_{p}}g - g{{S}_{p}}\left( {{{\rho }_{f}}{{z}_{p}} - {{\rho }_{s}}\left( {{{z}_{p}} - {{d}_{p}}} \right)} \right) + ({{C}_{f}} - {{C}_{s}}){{S}_{p}} + \mathop \smallint \limits_{{{S}_{p}}}^{} \frac{{\left( {{{\mu }_{f}} - 1} \right){{H}^{2}}\left( {z = {{z}_{p}}} \right)}}{{8\pi }}dS{\text{\;}}$Константы Cf и Cs в формуле (8) определяются из граничных условий, которые в случае наличия и отсутствия магнитного поля на поверхности кюветы ff отличаются друг от друга. Кроме того, важно, поднимается ли поршень или опускается. Одно из граничных условий сохраняется в любом случае: над поверхностью магнитной жидкости в сосуде ff в окружающей среде давление равно атмосферному p = pA.
Уравнение движения поршня вверх в однородном магнитном поле. Когда магнитное поле H∞ включено, поршень поднимается и жидкости текут в каналах 1 и 2. Жидкости считаются несжимаемыми, поэтому расход в сосудах f, ff и тонких каналах 1, 2 одинаковый:
(9)
${{S}_{p}}~{\text{|}}{{\dot {z}}_{p}}{\text{|}} = {{S}_{1}}{{u}_{{m1}}} = {{S}_{{ff}}}{\text{|}}{{\dot {h}}_{{ff}}}{\text{|}} = {{S}_{2}}{{u}_{{m2}}},\quad {{h}_{{ff}}} = {{h}_{{ff0}}} - \frac{{{{S}_{p}}}}{{{{S}_{{ff}}}}}\left( {{{z}_{p}} - {{z}_{0}}} \right)$Здесь hff(t) – вертикальная координата поверхности магнитной жидкости в сосуде ff; um1 – средняя скорость, с которой течет перекачиваемая жидкость из сливного отверстия в канале 1; um2 – средняя скорость, с которой течет магнитная жидкость из кюветы в сосуд f с поршнем в канале 2. Предполагается, что в тонких длинных трубках устанавливается течение Пуазейля, и имеет место следующая связь средней скорости и перепада давления в каналах:
(10)
${{u}_{{m1}}} = \frac{{\left| {{{p}_{1}} - {{p}_{A}}} \right|}}{{{{k}_{1}}}}~,\quad {{k}_{1}} = \frac{{8\pi {{\eta }_{s}}{{l}_{1}}}}{{{{S}_{1}}}},\quad {{u}_{{m2}}} = \frac{{\left| {{{p}_{3}} - {{p}_{2}}} \right|}}{{{{k}_{2}}}}~,\quad {{k}_{2}} = \frac{{8\pi {{\eta }_{f}}{{l}_{2}}}}{{{{S}_{2}}}}$Здесь p1 – давление жидкости в сосуде f на уровне канала 1, pA – атмосферное давление на выходе канала 1, p3 и p2 – давление магнитной жидкости на концах канала 2, ηs, ηf – коэффициенты динамической вязкости немагнитной и магнитной жидкостей. Считается, что на выходе из канала 1 (как и на поверхности магнитной жидкости в сосуде ff) давление равно атмосферному. На свободной поверхности магнитной жидкости в кювете ff при z = hff поле равно нулю и выполнено условие:
С учетом граничного условия на поверхности раздела жидкостей в кювете ff выражение (11) для давления в магнитной жидкости в кювете ff при z = Rb (на входе в канал 2) имеет вид:
С учетом (9), (10) и (12) выпишем выражение для константы Cf в выражении для давления в магнитной жидкости:
(13)
${{C}_{f}} = {{p}_{A}} + {{\rho }_{f}}g{{h}_{{ff}}} - {{\dot {z}}_{p}}\frac{{{{S}_{p}}{{k}_{2}}}}{{{{S}_{2}}}}$Теперь определим константу Cs в выражении для давления в немагнитной жидкости в сосуде ff. С учетом (9) и (10), считая, что на выходе из канала 1 при z = hc давление атмосферное, выражение для Cs имеет вид:
(14)
${{C}_{s}} = {{\dot {z}}_{p}}\frac{{{{S}_{p}}{{k}_{1}}}}{{{{S}_{1}}}} + {{p}_{A}} + {{\rho }_{s}}g{{h}_{c}}$Подставляя в закон движения (8) выражения (13), (14) с учетом (4), (9) получим следующее дифференциальное уравнение относительно zp ($\rho _{f}^{*}$ = ρf + ρfSp/Sff):
(15)
$\begin{gathered} {{M}_{p}}{{{\ddot {z}}}_{p}} = ~ - S_{p}^{2}\left( {\frac{{{{k}_{2}}}}{{{{S}_{2}}}} + \frac{{{{k}_{1}}}}{{{{S}_{1}}}}} \right){{{\dot {z}}}_{p}} + {{S}_{p}}g({{\rho }_{s}} - \rho _{f}^{*}){{z}_{p}} - {{M}_{p}}g + {{\rho }_{f}}g{{S}_{p}}\left( {{{h}_{{ff0}}} + \frac{{{{S}_{p}}}}{{{{S}_{{ff}}}}}{{z}_{0}}} \right) - \\ \, - {{\rho }_{s}}g{{S}_{p}}~({{h}_{c}} - {{d}_{p}})~ + \mathop \smallint \limits_{{{S}_{p}}}^{} \frac{{\left( {{{\mu }_{f}} - 1} \right){{H}^{2}}~}}{{8\pi }}dS{\text{\;}}~ \\ \end{gathered} $Выражение для квадрата модуля магнитного поля в безындукционном приближении равно квадрату магнитного поля вне сферического тела и имеет вид [25]:
(16)
${{H}^{2}} = H_{\infty }^{2}\left( {\frac{{9{{z}^{2}}({{x}^{2}} + {{y}^{2}}){{D}^{2}}}}{{{{{({{z}^{2}} + {{x}^{2}} + {{y}^{2}})}}^{5}}}} + {{{\left( {1 + \frac{D}{{{{{({{z}^{2}} + {{x}^{2}} + {{y}^{2}})}}^{{\frac{3}{2}}}}}} - \frac{{3{{z}^{2}}D}}{{{{{({{z}^{2}} + {{x}^{2}} + {{y}^{2}})}}^{{\frac{5}{2}}}}}}} \right)}}^{2}}} \right),\quad D = {{R}^{3}}\frac{{{{\mu }_{s}} - {{\mu }_{b}}}}{{2{{\mu }_{s}} + {{\mu }_{b}}}}$Интеграл FM = (μf – 1)$\int_{Sp} {{{H}^{2}}} $dS/8π назовем магнитной силой, эта сила линейно зависит от магнитной проницаемости μf и от квадрата приложенного магнитного поля H∞, и нелинейно зависит от координаты поршня zp. Из-за наличия этой магнитной силы уравнение движения поршня вверх в магнитном поле (15) является нелинейным и решается численно.
Численные расчеты в случае постоянного магнитного поля. Рассмотрим случай постоянного магнитного поля H∞ = const. График зависимости магнитной силы FM, действующей на поршень, от координаты поршня zp при H∞ = 150 Э приведен на рис. 4. По данному графику видно, что чем ближе поршень к сферическому телу zp ≈ Rb, которое искажает приложенное поле, тем действующая на поршень сила больше. Когда поршень удаляется от сферического намагничивающегося тела, то сила убывает.
Рис. 4.
Зависимость магнитной силы FM, действующей на поршень, от координаты поршня zp при H∞ = 150 Э.

Уравнение движения (15) решается с учетом выражения для магнитного поля (16) с начальными условиями (3). Написана программа в пакете Maple, в которой методом Рунге-Кутты 4 порядка рассчитывается движение поршня. Все расчеты здесь и далее проведены при экспериментальных параметрах, указанных в таблице.
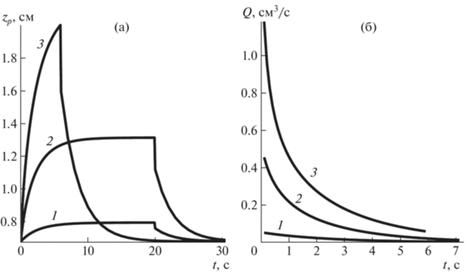
Графики зависимости координаты поршня zp и расхода немагнитной жидкости Q от времени при различных H∞ приведены на рис. 5а и 5б. На рис. 5а монотонно возрастающие части графиков соответствуют подъему поршня. На графиках линия 1 – H∞ = 50 Э, 2 – H∞ = 150 Э, 3 – H∞ = = 300 Э. Чем большее приложенное магнитное поле H∞, тем больше скорость и, соответственно, расход жидкости. Скорость поршня и расход жидкости максимальны в начальный момент времени, сразу после включения магнитного поля, и уменьшаются до нуля с течением времени, когда поршень останавливается. Максимум графиков на рис. 5а в приложенном магнитном поле H∞ < Hc (Hc – поле, при котором равновесное положение поршня совпадает с координатой сливного отверстия) достигается в тот момент времени, когда скорость движения поршня становится мала (рис. 5а линии 1 и 2), и поршень занимает свое равновесное положение. При H∞ = Hc = 239 Э равновесное положение поршня совпадает с вертикальной координатой сливного отверстия zp = hc. При H∞ > Hc расчет подъема поршня прекращается, когда координата поршня достигает сливного отверстия (рис. 5а линия 3). Время движения поршня tp – это время, за которое при соответствующем приложенном магнитном поле H∞ < Hc устанавливается равновесие поршня, или в случае H∞ > Hc – это время, за которое поршень достигает координаты сливного отверстия zp = hc. Эта зависимость имеет максимум при H∞ = Hc, и для полей, больших этого значения, резко убывает. График зависимости времени движения поршня tp от приложенного магнитного поля H∞ построен на рис. 6. На рис. 3а приведены теоретическая и экспериментальная зависимости координаты поршня zp от времени t при H∞ = 100 Э. Видно хорошее совпадение теории и эксперимента.

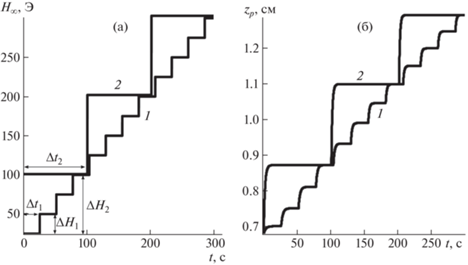
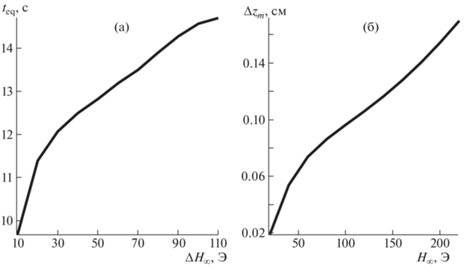
Численные расчеты в случае ступенчатого магнитного поля H∞(t). Магнитное поле H∞ может меняться со временем. Например, рассмотрим ступенчатые функции H∞(t) = ΔH[t/Δt], где [t/Δt] – целая часть числа. Ступенчатое магнитное поле позволяет дозировать поток перекачиваемой жидкости, а также обеспечить более равномерный расход жидкости. Для наглядности рассмотрим два случая. На рис. 7a изображены зависимости поля, меняющегося скачками при ΔH1 = 25 Э, Δt1 = 25 с (линия 1) и при ΔH2 = 100 Э, Δt2 = 100 с (линия 2). На рис. 7б изображена зависимость вертикальной координаты поршня от времени для таких ступенчатых полей (линии 1 и 2 соответственно). При увеличении поля скачком на ΔH∞ поршень начинает подниматься, и за время teq устанавливается новое положение равновесия выше на Δz. Теоретическая зависимость времени teq от величины скачка магнитного поля ΔH∞ показана на рис. 8а. При увеличении скачка поля ΔH∞, время teq возрастает. При достаточно больших полях ~100 Э время teq выходит на постоянное значение teq ≈ 15 с, при указанных в таблице параметрах. Отметим, что в эксперименте, рассмотренном выше, Δt > 15 с, поэтому на каждом шаге поршень выходит на равновесное положение. Можно отметить, что максимальное изменение вертикальной координаты поршня Δzm возрастает с ростом значения ступенчатого поля H∞(t), а значит со временем t (см. рис. 8б). Это означает, что ступенчатое магнитное поле с одинаковыми ступеньками не гарантирует одинаковый подъем поршня при каждом изменении ступенчатого поля.
Рис. 7.
Примеры ступенчатого изменения поля H∞(t) от времени (а). Теоретическая зависимость zp от t для этих примеров (б).
На рис. 3б приведены теоретические и экспериментальные зависимости zp от t в ступенчатом поле, использованном в эксперименте. Видно хорошее совпадение теории и эксперимента, при малых временах, соответствующих малым магнитным полям H∞ < 100 Э. При больших временах, соответствующих большим полям H∞ > 120 Э, наблюдается расхождение теории и эксперимента, связанное с тем, что при этих полях надо учитывать зависимость магнитной проницаемости от H (μf= μf(H)) и магнитная сила при этом становится меньше силы, рассчитанной теоретически при μf= const.
Уравнение движения поршня при выключении магнитного поля. Пусть после включения поля H∞ поршень поднялся до уровня hcc > z0, величина hcc ограничена hcc ≤ hc. И в этот момент t = tcc поле выключается. Поршень начинает опускаться. Вид уравнения движения поршня при выключении магнитного поля существенно зависит от способа залива перекачиваемой жидкости. Будем считать, что пространство между z = zp и z = hc мгновенно заполняется перекачиваемой жидкостью, и при z = hc поддерживается давление ps = pA. При этом уравнение движения поршня имеет вид, отличающийся от уравнения (15). Выражение для константы Cs при указанных выше граничных условиях имеет вид:
Для определения Cf учтем, что pf = pA при z = hff в сосуде ff. Давление магнитной жидкости в сосуде ff при z = Rb этом имеет вид:
Давление магнитной жидкости в сосуде f при z = Rb равно:
Так как p2 – p3 = k2um2 и p2 > p3, то выражение для Cf имеет вид:
Величина hff(t) связана с zp законом сохранения массы магнитной жидкости:
(21)
$\left( {{{h}_{{ff}}}\left( t \right) - {{h}_{{ff}}}\left( {t = {{t}_{{cс}}}} \right)} \right){{S}_{{ff}}} = ({{h}_{{cc}}} - {{z}_{p}}){{S}_{p}}$Здесь hcc = zp(t = tcc) – положение поршня в момент выключения магнитного поля. Величины hcc(t = tcc) и hff(t = tcc) определяются из решения задачи при 0 ≤ t ≤ tcc, когда магнитное поле включено (H∞ ≠ 0). Из закона сохранения массы следует выражение для hff (K = Vf/Sff, здесь Vf – объем магнитной жидкости, при z > 0, Vf = const):
(22)
${{h}_{{ff}}} = {{h}_{{ff}}}\left( {t = {{t}_{{сс}}}} \right) + \frac{{\left( {{{h}_{{cc}}} - {{z}_{p}}} \right)~{{S}_{p}}}}{{{{S}_{{ff}}}}} = \frac{{({{h}_{{ff}}}\left( {t = {{t}_{{сс}}}} \right){{S}_{{ff}}} + {{h}_{{cc}}}{{S}_{p}})~}}{{{{S}_{{ff}}}}} - \frac{{{{z}_{p}}{{S}_{p}}}}{{{{S}_{{ff}}}}} = K - \frac{{{{z}_{p}}{{S}_{p}}}}{{{{S}_{{ff}}}}}$С учетом (9), (17), (20), (22) уравнение для zp (8) в отсутствие магнитного поля можно записать в виде ($\rho _{f}^{*}$ = ρf + ρfSp/Sff):
(23)
${{M}_{p}}{{\ddot {z}}_{p}} = - {{M}_{p}}g + \frac{{{{k}_{2}}\left| {{{{\dot {z}}}_{p}}} \right|S_{p}^{2}}}{{{{S}_{2}}}} - {{z}_{p}}g{{S}_{p}}(\rho _{f}^{*} - {{\rho }_{s}}) + {{\rho }_{f}}gK{{S}_{p}} - {{\rho }_{s}}g({{h}_{c}} - {{d}_{p}}){{S}_{p}}$Это уравнение верно при ${{\dot {z}}_{p}} < 0,~{\text{|}}{{\dot {z}}_{p}}{\text{|}} = - {{\dot {z}}_{p}}$. Данное уравнение решается с начальными условиями:
Уравнение (23) является линейным дифференциальным уравнением второго порядка с постоянными коэффициентами и решается аналитически. Введем обозначения: A = k2$S_{p}^{2}$/S2; B = = gSp($\rho _{f}^{*}$ – ρs); C = ρfgKSp – ρsg(hc – dp)Sp – Mpg. При этом уравнение (23) имеет вид:
Для дифференциального уравнения (25) можно написать характеристическое уравнение: Mpλ2+ Aλ + B = 0. Из решения характеристического уравнения получаем: λ1,2 = (–A ± √(A2– ‒ 4BMp))/2Mp). При параметрах, указанных в таблице A = 1775 [г · с–1], B = 652 [дин · см–1], C = 443 [дин], λ1= –7100 [c–1], λ2= –0.37 [c–1].
Решение дифференциального уравнения второго порядка (25) имеет вид:
(26)
${{z}_{p}} = {{C}_{1}}{{e}^{{{{\lambda }_{1}}t}}} + {{C}_{2}}{{e}^{{{{\lambda }_{2}}t}}} + \frac{С}{В}$Константы C1, C2 находятся из начальных условий (24).
На основании решения (26) можно продолжить графики зависимости координаты поршня от времени. Для параметров, указанных в таблице, данные зависимости показаны на рис. 5а (монотонно убывающие части графиков) при разных значениях постоянного магнитного поля до его выключения.
ЗАКЛЮЧЕНИЕ
Создан прототип насоса-дозатора на основе взаимодействия тела из намагничивающего материала и магнитной жидкости в однородном магнитном поле. Основное достоинство такого прототипа в том, что управление процессом перекачивания происходит бесконтактно с помощью однородного магнитного поля. Это позволяет уменьшать размеры устройства, которые не ограничиваются характерными размерами изменения магнитного поля.
Экспериментальное исследование движения вверх поршня насоса-дозатора при включении постоянного или ступенчатого поля показало возможность управления насосом-дозатором с помощью однородного магнитного поля. Различные способы изменения во времени однородного магнитного поля могут быть использованы для регулирования расхода перекачиваемой жидкости. В частности, ступенчатое изменение магнитного поля позволяет дозировать поток перекачиваемой жидкости, если это необходимо.
Выведены уравнения, описывающие движение поршня, разделяющего магнитную и перекачиваемую жидкости в предложенном прототипе, как при включении магнитного поля, так и при его выключении.
Теоретически рассмотрено движение поршня вниз при выключении магнитного поля для одного из возможных способов залива перекачиваемой жидкости. Выписано аналитическое решение и построены зависимости положения поршня от времени при движении поршня вниз. Эти зависимости позволяют оценить время опускания поршня после выключения магнитного поля.
Численные расчеты движения поршня при включении постоянного магнитного поля позволили получить зависимость времени подъема поршня от величины поля. Эта зависимость имеет максимум при некотором значении магнитного поля, и для полей, больших этого значения, резко убывает. Получено выражение для магнитной силы, действующей на поршень в магнитном поле. Показано, что магнитная сила убывает при удалении поршня от тела, окруженного магнитной жидкостью. Рассчитаны зависимости положения поршня и текущего расхода перекачиваемой жидкости от времени при разных значениях магнитного поля. Показано, что скорость движения поршня и расход растут с ростом величины поля и уменьшаются до нуля со временем.
В случае ступенчатого магнитного поля рассчитана зависимость оптимального времени ожидания равновесия поршня от величины ступеньки переключаемого поля. Обнаружено, что время ожидания ограничено сверху некоторым значением. Это означает, если время выдержки ступеньки поля больше этого значения, то поршень успевает остановиться перед очередным увеличением поля. Вычислена зависимость изменения вертикальной координаты поршня при увеличении поля на очередной ступеньке от величины магнитного поля. Показано, что эта зависимость является возрастающей. Это означает, что ступенчатое магнитное поле с одинаковыми ступеньками не гарантирует одинаковый подъем поршня при каждом изменении поля.
Траектории подъема поршня, рассчитанные численно, как для постоянного, так и для ступенчатого достаточно малых магнитных полей, хорошо совпадают с измеренными в эксперименте.
Работа поддержана Российским научным фондом (№ 20-71-10002).
Список литературы
Neuringer J.L., Rosensweig R.E. Ferrohydrodynamics // The Physics of Fluids. 1964. V. 7. № 12. P. 1927–1937.
Розенцвейг Р. Феррогидродинамика. Пер. с англ. М.: Мир, 1989. С. 357.
Гогосов В.В., Налетова В.А., Шапошникова Г.А. Гидродинамика намагничивающихся жидкостей // Итоги науки и техники. Механика жидкости и газа. 1981. Т. 16. С. 76–208.
Налетова В.А. Лекции по феррогидродинамике. М.: Изд-во ЦПИ при механико-математическом факультете МГУ, 2005. С. 152.
Кирюшин В.В., Параскевопуло О.Р. Форма поверхности капли магнитной жидкости вблизи острия магнитного клина // Изв. РАН. МЖГ. 1992. № 4. С. 113–117.
Пелевина Д.А. Форма свободной поверхности магнитной жидкости с цилиндрическим концентратором магнитного поля // Изв. РАН. МЖГ. 2016. № 6. С. 15–24.
Тятюшкин А.Н. Течение тонкого слоя намагничивающейся жидкости в магнитном поле. // Известия РАН. МЖГ. 2019. № 4. С. 27–32.
Тятюшкин А.Н. Деформация капли невязкой намагничивающейся жидкости в нестационарном магнитном поле // Изв. РАН. МЖГ. 2021. № 5. С. 138–150.
Park G.S., Park S.H. Design of magnetic fluid linear pump // IEEE Trans. Magn. 1999. V. 35. № 5. P. 4058–4060.
Park G.S., Park S.H. New structure of the magnetic fluid linear pump // IEEE Trans. Magn. 2000. V. 36. № 5. P. 370–3711.
Park G.S., Kang S. New Design of the magnetic fluid linear pump to reduce the discontinuities of the pumping forces // IEEE Trans. Magn. 2004. V. 40. № 2. P. 916–919.
Zhao M., Zou J.B., Xu Y.X., Zhao B., Li Y. Investigation of spin travelling wave pump on magnetic fluid // Materials Research Innovations. 2015. V. 19. № 5. P. 429–432.
Zhao Meng, Zou Jibin, Hu Jianhui, Xu Yongxiang. Analysis of driving capacity on traveling wave pump of magnetic fluid // Abstract Book of 12th International Conference on Magnetic Fluids (ICMF12), Sendai. 2010. P. 138–139.
Ido Y., Tanaka K., Sigiura Y. Fluid transportation mechanisms by a coupled system of elastic membranes and magnetic fluid // Journal of Magnetism and Magnetic Materials. 2002. V. 252. P. 344–346.
Калмыков С.А., Налетова В.А., Пелевина Д.А., Турков В.А. Двухслойное течение намагничивающихся жидкостей // Изв. РАН. МЖГ. 2013. № 5. С. 3–13.
Greivell N.E., Hannaford B. The Design of a Ferrofluid Magnetic Pipette // Transactions on Biomedical Engineering. 1997. V. 44. № 3. P. 129–135.
Yamahata C., Chastellain M., Parashar V.K., Petri A., Hofmann H., Gijs M.A.M. Plastic micropump with ferrofluidic actuation // Journal of Microelectromechanical Systems. 2005. V. 14. № 1. P. 96–102.
Das K., Sarkar M., Mukhopadhyay A., Ganguly R. Transient response of a ferrofluid plug-driven micropump // Magnetohydrodynamics. 2013. V. 49. № 3/4. P. 499–504.
Ando B., Ascia A., Baglio S., Pitrone N. Ferrofluidic pumps: A valuable implementation without moving parts // IEEE Transactions on Instrumentation and Measurement. 2009. V. 58. № 9. P. 3232–3237.
Andò B., Ascia A., Baglio S., Pitrone N. Magnetic Fluids and Their Use in Transducers // IEEE Instrumentation & Measurement Magazine. 2006. V. 9. № 6. P. 44–47.
Hartshorne H., Backhouse C.J., Lee W.E. Ferrofluid-based microchip pump and valve // Sensors and Actuators. 2004. V. 99. № 2–3. P. 592–600.
Hatch A., Kamholz A.E., Holman G., Yager P., Böhringer K.F. A Ferrofluidic Magnetic Micropump // Journal of microelectromechanical systems. 2001. V. 10. № 2. P. 215–221.
Ashouri M., Shafii M.B., Moosavi A., Hezave H.A. A novel revolving piston minipump // Sensors and Actuators. 2015. V. 218. P. 237–244.
Liu B., Zhang Z., Yang J.,Yang J., Li D. A rotary ferrofluidic vane micropump with C shape baffle // Sensors and Actuators. 2018. V. 263. P. 452–458.
Ландау Л.Д., Лифшиц Е.М. Электродинамика сплошных сред. М.: Наука, 1992. С. 632.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Механика жидкости и газа