

Акустический журнал, 2022, T. 68, № 4, стр. 385-390
Резонатор с управляемой прозрачностью границ
О. А. Савицкий *
АО “Акустический институт им. Академика Н.Н. Андреева”
117036 Москва, ул. Шверника 4, Россия
* E-mail: osav66@mail.ru
Поступила в редакцию 07.03.2022
После доработки 28.03.2022
Принята к публикации 30.03.2022
- EDN: NMRLTJ
- DOI: 10.31857/S0320791922040104
Аннотация
Рассматривается возможность управления акустической прозрачностью границ резонатора с использованием пьезоактивных материалов. Решена стационарная электроакустическая задача о колебаниях пьезоактивной структуры с граничными условиями специального вида в плосковолновом приближении. Рассмотрен переходной режим излучения резонатора с накачкой. Сформулированы предложения по применению резонаторов с управляемыми границами в гидроакустике и ультразвуковой эхоскопии.
ВВЕДЕНИЕ
Во многих практических акустических задачах находят применение резонаторы в виде плоскопараллельных слоев волновых размеров. В качестве примеров можно упомянуть задачи, связанные с созданием мощных источников когерентного излучения, локальных областей с высокими интенсивностями ультразвука для реализации технологических процессов и т.д.
Резонаторы, как известно, представляют собой колебательные системы, предназначенные для создания и накопления энергии колебаний за счет резонанса при совпадении частоты вынуждающей силы с одной из собственных частот резонатора. Важнейшей характеристикой резонатора является его добротность
или связанная с ней величина – декремент затухания ${{\delta }} = \frac{{{\pi }}}{Q}$ [1]. В формуле (1) ${{f}_{0}}$ – собственная частота резонатора, ${{\alpha }}$ – временной коэффициент затухания амплитуды колебаний.Основными факторами, препятствующими достижению больших плотностей энергии в резонаторе, т.е. снижающими добротность, являются внутренние потери акустической энергии в рабочем теле резонатора, а также потери, связанные с переизлучением акустической энергии через границы резонатора.
В твердотельном резонаторе в виде плоскопараллельного слоя, окруженного с обоих сторон жидкой или газообразной средой, амплитудный коэффициент временного затухания находится из дисперсионного уравнения и равен [2]
(2)
${{\alpha }} = \frac{{{{\omega с}}{\kern 1pt} {\text{'}}}}{c} + \frac{c}{l}{\text{ln}}\frac{1}{{\left| R \right|}},$1. ПОСТАНОВКА ЗАДАЧИ
Для управления прозрачностью границ резонатора можно использовать физические поля, например, электрическое. В такой постановке задача выглядит естественной для пьезоэлектриков, поскольку и сами колебания в пьезоэлектрических резонаторах возбуждаются электрическим полем. Возможности электрического управления параметрами пьезоизлучателей и волноводов, например, для излучения коротких акустических импульсов, рассматривались ранее в статьях [3–5].
Рассмотрим вначале установившиеся продольные колебания частоты ${{\omega }}$ в плоскослоистой структуре, показанной на рис. 1. Исследуемая электромеханическая система состоит из четырех слоев пьезоэлектрика и ограничена плоскостями $z = 0; \pm {{l}_{1}};~ \pm {{l}_{2}}$. Удельный волновой импеданс слоев равен ${{z}_{p}}$. Направление вектора поляризации P пьезоэлектрика совпадает с осью z для слоев, ограниченных плоскостями $z = 0;\,{{l}_{1}};\,{{l}_{2}}$ и противоположно направлению оси z для слоев, ограниченных плоскостями $z = 0; - {{l}_{1}}; - {{l}_{2}}$. Слева и справа рассматриваемая структура окружена упругой средой с удельным волновым импедансом продольных волн ${{z}_{0}}$. Возбуждение механических колебаний происходит за счет приложения электрических потенциалов ${{{{\varphi }}}_{1}}$ и ${{{{\varphi }}}_{2}}$ к электродам, расположенным на границах $z = 0;\, \pm {{l}_{1}};\,~ \pm {{l}_{2}}$, как показано на рис. 1. Потенциал электрода, расположенного в сечении z = 0, принимается равным нулю.
Рис. 1.
Плоскослоистая пьезоактивная структура. Удельные волновые импедансы пьезоэлектрика ${{z}_{p}}$ и окружающей среды ${{z}_{0}}$.
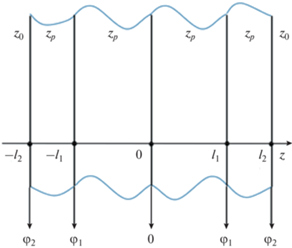
В отсутствие потенциалов звукопрозрачность границ структуры $z = \pm {{l}_{2}}$ определяется только соотношением импедансов ${{z}_{p}}$ и ${{z}_{0}}$. В частном случае ${{z}_{p}} = {{z}_{0}}$ структура вообще не будет проявлять резонансных свойств.
Как указывалось выше, высокие значения добротности рассматриваемого резонатора могут быть достигнуты при акустически непрозрачных границах С. Учитывая, что в плоских бегущих волнах в средах, удовлетворяющих закону Гука, механические напряжения T и колебательная скорость ${{\dot {\xi }}}$ связаны простой функциональной зависимостью $T = \pm {{z}_{p}}{{\dot {\xi }}}$, легко прийти к выводу, что для устранения оттока энергии из резонатора возможны три варианта граничных условий:
– акустически жесткие границы ${{\left. {\dot {\xi }} \right|}_{с}} = 0$;
– свободные границы, где ${{\left. T \right|}_{с}} = 0$;
– границы, на которых одновременно выполнены условия ${{\left. {\dot {\xi }} \right|}_{с}} = 0$ и ${{\left. T \right|}_{с}} = 0$.
Первые два варианта хорошо известны и обсуждались выше. Рассмотрим электромеханическую задачу о колебаниях в системе (рис. 1) с граничными условиями третьего типа. В этом случае решение задачи очевидно не будет зависеть от акустических свойств среды ${{z}_{0}}$, окружающей колебательную систему.
2. РЕШЕНИЕ ДЛЯ СТАЦИОНАРНОГО РЕЖИМА РАБОТЫ РЕЗОНАТОРА
В силу симметрии механических и электрических свойств системы достаточно найти решение электромеханической задачи справа от плоскости $z = 0$, заменив влияние ее левой части условиями на акустически жесткой границе.
Рассматривается краевая задача
(3)
$\left\{ \begin{gathered} \frac{{d{{T}^{{\left( {1,2} \right)}}}}}{{dz}} = - \rho {{{{\omega }}}^{2}}{{{{\xi }}}^{{\left( {1,2} \right)}}}, \hfill \\ {{E}^{{\left( {1,2} \right)}}} = - {{h}_{{33}}}\frac{{d{{{{\xi }}}^{{\left( {1,2} \right)}}}}}{{dz}} + {{\beta }}_{{33}}^{s}{{D}^{{\left( {1,2} \right)}}}, \hfill \\ {{T}^{{\left( {1,2} \right)}}} = c_{{33}}^{D}\frac{{d{{{{\xi }}}^{{\left( {1,2} \right)}}}}}{{dz}} - {{h}_{{33}}}{{D}^{{\left( {1,2} \right)}}}, \hfill \\ \frac{{d{{D}^{{\left( {1,2} \right)}}}}}{{dz}} = 0, \hfill \\ {{{{\xi }}}^{{\left( 1 \right)}}}\left( 0 \right) = 0, \hfill \\ {{{{\xi }}}^{{\left( 2 \right)}}}\left( {{{l}_{2}}} \right) = 0, \hfill \\ {{T}^{{\left( 2 \right)}}}\left( {{{l}_{2}}} \right) = 0, \hfill \\ {{{{\xi }}}^{{\left( 1 \right)}}}\left( {{{l}_{1}}} \right) = {{{{\xi }}}^{{\left( 2 \right)}}}\left( {{{l}_{1}}} \right), \hfill \\ {{T}^{{\left( 1 \right)}}}\left( {{{l}_{1}}} \right) = {{T}^{{\left( 2 \right)}}}\left( {{{l}_{1}}} \right), \hfill \\ \end{gathered} \right.$Решение (3) удобно записывать в обезразмеренном виде, введя следующие обозначения: $a = \frac{{{{l}_{2}}}}{{{{l}_{1}}}}$; пространственная переменная ${{z}_{1}} = \frac{z}{{{{l}_{1}}}}$; фазовая переменная ${{{{\varphi }}}_{1}} = k{{l}_{1}}$; волновое число $k = \frac{{{\omega }}}{{v_{3}^{D}}}$; скорость продольных волн в пьезоэлектрике $v_{3}^{D} = \sqrt {\frac{{c_{{33}}^{D}}}{{{\rho }}}} ~$; квадрат коэффициента электромеханической связи пьезоматериала $k_{t}^{2} = \frac{{h_{{33}}^{2}}}{{{{\beta }}_{{33}}^{S}c_{{33}}^{D}}}$; коэффициент электромеханической трансформации $N = \frac{{{{h}_{{33}}}C_{1}^{s}}}{S}$, где S – площадь поперечного сечения структуры, $C_{1}^{s}$ – электрическая емкость между электродами в сечениях $z = 0$ и $z = {{l}_{1}}$.
Собственные частоты рассматриваемой электромеханической системы находятся из уравнения
(4)
$\frac{{{{{{\varphi }}}_{1}}}}{{k_{t}^{2}}} = \frac{{{\text{sin}}{{{{\varphi }}}_{1}}{\text{cos}}\frac{{{{{{\varphi }}}_{1}}\left( {1 - a} \right)}}{2}}}{{{\text{cos}}\frac{{{{{{\varphi }}}_{1}}\left( {1 + a} \right)}}{2}}}.$Решение задачи (3) для полей $T$ и ${{\dot {\xi }}}$ представляет собой кусочно-непрерывные на отрезке $\left[ {0,a} \right]$ функции вида
(5)
$\begin{gathered} \hfill T\left( {{{z}_{1}}} \right) = \frac{{N{{U}_{1}}}}{{1 - k_{t}^{2}\frac{{{\text{sin}}{{{{\varphi }}}_{1}}}}{{{{{{\varphi }}}_{1}}}}\frac{{{\text{sin}}\left[ {{{{{\varphi }}}_{1}}\left( {1 - a} \right)} \right]}}{{{\text{sin}}{{{{\varphi }}}_{1}} - {\text{sin}}\left( {{{{{\varphi }}}_{1}}a} \right)}}}} \times \\ \hfill \times \,\,\left\{ \begin{gathered} \frac{{{\text{sin}}\left[ {{{{{\varphi }}}_{1}}\left( {1 - a} \right)} \right]}}{{{\text{sin}}{{{{\varphi }}}_{1}} - {\text{sin}}\left( {{{{{\varphi }}}_{1}}a} \right)}}{\text{cos}}\left( {{{{{\varphi }}}_{1}}{{z}_{1}}} \right) - 1,~\,\,\,0 < {{z}_{1}} < 1,~ \hfill \\ \frac{{{\text{sin}}{{{{\varphi }}}_{1}}}}{{{\text{sin}}{{{{\varphi }}}_{1}} - {\text{sin}}\left( {{{{{\varphi }}}_{1}}a} \right)}}\left[ {{\text{cos}}\left[ {{{{{\varphi }}}_{1}}({{z}_{1}} - a)} \right] - 1} \right],\,\,~1 < {{z}_{1}} < a,~ \hfill \\ \end{gathered} \right. \\ \end{gathered} $(6)
$\begin{gathered} {{\dot {\xi }}}\left( {{{z}_{1}}} \right) = \frac{{\frac{{jN{{U}_{1}}}}{{{{z}_{p}}}}}}{{1 - k_{t}^{2}\frac{{{\text{sin}}{{{{\varphi }}}_{1}}}}{{{{{{\varphi }}}_{1}}}}\frac{{{\text{sin}}\left[ {{{{{\varphi }}}_{1}}\left( {1 - a} \right)} \right]}}{{{\text{sin}}{{{{\varphi }}}_{1}} - {\text{sin}}\left( {{{{{\varphi }}}_{1}}a} \right)}}}} \times \hfill \\ \times \,\,\left\{ \begin{gathered} \frac{{{\text{sin}}\left[ {{{{{\varphi }}}_{1}}\left( {1 - a} \right)} \right]{\text{sin}}\left( {{{{{\varphi }}}_{1}}{{z}_{1}}} \right)}}{{{\text{sin}}{{{{\varphi }}}_{1}} - {\text{sin}}\left( {{{{{\varphi }}}_{1}}a} \right)}} - 1,\,\,\,~0 < {{z}_{1}} < 1,~~ \hfill \\ \frac{{{\text{sin}}{{{{\varphi }}}_{1}}{\text{sin}}\left[ {{{{{\varphi }}}_{1}}({{z}_{1}} - a)} \right]}}{{{\text{sin}}{{{{\varphi }}}_{1}} - {\text{sin}}\left( {{{{{\varphi }}}_{1}}a} \right)}},~\,\,\,1 < {{z}_{1}} < a.~ \hfill \\ \end{gathered} \right. \hfill \\ \end{gathered} $Найденные решения (5) и (6), с учетом симметрии, могут быть продолжены на весь отрезок $\left[ { - a,a} \right]$, занимаемый резонатором.
В решение задачи также входят выражения для отношений возбуждающих напряжений ${{U}_{1}}$, ${{U}_{2}}$ и токов ${{I}_{1}}$, ${{I}_{2}}$, протекающих через поперечные сечения $z = {{z}_{{1,2}}}$ ($0 < {{z}_{1}} < {{l}_{1}},~{{l}_{1}} < {{z}_{2}} < {{l}_{2}})$ структуры, при условии непроницаемости ее внешних границ
(7)
$\begin{gathered} \frac{{{{U}_{1}}}}{{{{U}_{2}}}} = \frac{{{\text{sin}}{{{{\varphi }}}_{1}} - {\text{sin}}\left( {{{{{\varphi }}}_{1}}a} \right)}}{{a{\text{sin}}{{{{\varphi }}}_{1}} - {\text{sin}}\left( {{{{{\varphi }}}_{1}}a} \right)}} \times \\ \times \,\,\left( {1 - k_{t}^{2}\frac{{{\text{sin}}{{{{\varphi }}}_{1}}}}{{{{{{\varphi }}}_{1}}}}\frac{{{\text{sin}}\left( {{{{{\varphi }}}_{1}}\left( {1 - a} \right)} \right)}}{{{\text{sin}}{{{{\varphi }}}_{1}} - {\text{sin}}\left( {{{{{\varphi }}}_{1}}a} \right)}}} \right), \\ \end{gathered} $(8)
$\frac{{{{I}_{1}}}}{{{{I}_{2}}}} = \frac{{{\text{sin}}{{{{\varphi }}}_{1}} - {\text{sin}}\left( {{{{{\varphi }}}_{1}}a} \right)}}{{{\text{sin}}{{{{\varphi }}}_{1}}}}.$Отношение токов возбуждения ${{I}_{{e1}}}$, ${{I}_{{e2}}}$ электродов $z = \pm {{l}_{1}}$ и $z = \pm {{l}_{2}}$ определяется из выражения
(9)
$\frac{{{{I}_{1}}}}{{{{I}_{2}}}} = \frac{{{\text{sin}}\left( {{{{{\varphi }}}_{1}}a} \right)}}{{{\text{sin}}{{{{\varphi }}}_{1}}}}.$Рассчитанные по формулам (5), (6) нормированные распределения амплитуд механических напряжений и скоростей смещений в рассматриваемой электромеханической системе на трех первых модах колебаний приведены на рис. 2а и 2б, соответственно. Расчеты выполнены для значений параметров системы $a = 1.6$ и пьезоэлектрика $k_{t}^{2} = 0.42$.
Рис. 2.
Амплитуды (а) – колебательной скорости и (б) – механических напряжений на трех низших модах системы.
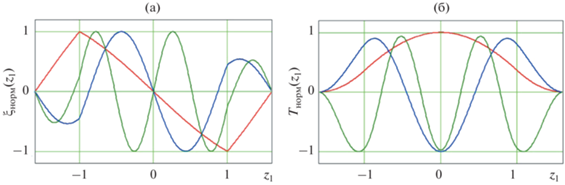
Как видно из рис. 2, на границах исследуемой структуры условие акустической непроницаемости третьего типа левой и правой границ колебательной системы выполняется.
Накопленная в системе энергия может быть высвобождена после отключения электрического поля, обеспечивающего непроницаемость ее границ.
3. ПЕРЕХОДНОЕ ИЗЛУЧЕНИЕ
Полученные результаты для установившихся колебаний рассматриваемой электромеханической системы могут быть использованы для расчета формы волн, переизлучаемых во внешнюю среду после выключения электрического поля. В простейшем случае, когда импедансы пьезоэлектрика структуры и окружающей среды равны (${{z}_{p}} = {{z}_{0}}$), форма профиля прямой ${{T}_{r}}\left( \zeta \right)$ и обратной ${{T}_{l}}\left( {{\eta }} \right)$ волн может быть легко определена по формулам
(10)
${{T}_{r}}\left( \zeta \right) = T\left( \zeta \right)\cos \left( {\omega {{t}_{0}}} \right) + {{z}_{p}}\dot {\xi }\left( \eta \right)\sin \left( {\omega {{t}_{0}}} \right),$(11)
${{T}_{l}}\left( \eta \right) = T\left( \eta \right)\cos \left( {\omega {{t}_{0}}} \right) - {{z}_{p}}\dot {\xi }\left( \eta \right)\sin \left( {\omega {{t}_{0}}} \right),$Как следует из (10) и (11), форма профиля волн, излучаемых из области резонатора после “открытия” его границ, зависит от возбуждаемой моды и момента выключения возбуждающего колебания электрического поля.
4. РЕЗУЛЬТАТЫ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ
Нестационарные режимы работы пьезорезонатора с управляемой прозрачностью границ исследовались методами конечно-элементного анализа в среде Comsol multiphysics в одномерной постановке. Резонатор представлял собой равнотолщинную четырехслойную структуру $\left( {a = 2} \right)$ из пьезокерамики PZT-5A с толщиной слоя 1.95 мм. Ось z нормальна к границам структуры. Левое и правое полупространства заполнялись средой, механические свойства которой совпадают со свойствами пьезокерамики PZT-5A. Таким образом, в отсутствие на электродах структуры электрических напряжений, среда представляет собой однородное упругое пространство. Гармонические колебания возбуждались подачей на электроды ($z = 1.95{\text{\;мм}}$, $z = 2.90{\text{\;мм}}$) импульсного сигнала с гармоническим заполнением частоты ${{f}_{0}} = 372{\text{\;кГц}}$ и плавно нарастающей амплитудой (рис. 3).

Длительность импульса составляла N = 24 полных периода несущей частоты. После достижения амплитуд возбуждающих электрических напряжений на электродах ${{U}_{1}} = 1$ В и ${{U}_{2}} = 4.85$ В, соответственно, электрическое поле выключалось. Точка наблюдения располагалась в правом полупространстве на расстоянии $z = 10~\,\,{\text{мм}}$ от начала координат.
На рис. 4 представлены пространственные распределения z-компоненты механических смещений и тензора напряжений в момент перед выключением электрического поля, когда они достигли наибольшей амплитуды. Видно, что за пределами резонатора амплитуда колебаний существенно меньше, чем внутри структуры.
Рис. 4.
z-компоненты механических смещений (сплошная линия) и тензора напряжений (пунктир) в момент перед выключением электрического поля. Электроды расположены в сечениях $z = 1.95{\text{\;мм}}$ и $z = 2.90{\text{\;мм}}$.

В момент выключения поля граница резонатора $z = 2.90{\text{\;мм}}$ становится прозрачной, и накопленная колебательная энергия переизлучается в окружающее пространство в виде короткого акустического импульса (рис. 5).
Рис. 5.
z-компоненты механических смещений (сплошная линия) и тензора напряжений (пунктир) в момент после выключения электрического поля. Поле выключается при ${{t}_{0}} = {N \mathord{\left/ {\vphantom {N {{{f}_{0}}}}} \right. \kern-0em} {{{f}_{0}}}}$. Электроды расположены в сечениях $z = 1.95{\text{\;мм}}$ и $z = 2.90{\text{\;мм}}$.

Как указывалось выше (10), (11), форма акустического импульса, переизлучаемого структурой, зависит от фазы колебаний в момент выключения. На рис. 6 представлены формы волны смещений (z-компоненты) в точке наблюдения при различных значениях фазы колебаний ${{\omega }}{{t}_{0}}$ в момент выключения поля.
Рис. 6.
z-компонента механических смещений в точке наблюдения при различных значениях фазы колебаний в резонаторе в момент выключения поля.

Как следует из рис. 6, подбирая момент выключения электрического поля, можно управлять формой излучаемого акустического импульса от однополярной обоих знаков до двуполярной, в виде одного периода колебания, близкого к синусоидальному.
ЗАКЛЮЧЕНИЕ
Показана возможность управления акустической прозрачностью границ в пьезоэлектриках с использованием электрического поля. Электромеханические системы, подобные рассмотренной, могут быть использованы для создания источников мощных коротких акустических импульсов, а электрическое поле в них играет роль своеобразной накачки системы колебательной энергией. Рассмотренная задача может рассматриваться как один из подходов к созданию акустических лазеров.
Автор выражает благодарность М.А. Миронову за полезные рекомендации и обсуждение результатов работы.
Список литературы
Горелик Г.С. Колебания и волны: Введение в акустику, радиофизику и оптику: Учебное пособие. Физматгиз, 1959.
Исакович М.А. Общая акустика. Учебное пособие. М.: Наука, Главная редакция физико-математической литературы, 1973.
Грищенко Е.К. Акустический аналог электрооптического затвора // Акуст. журн. 1975. Т. 21. № 5. С. 827–828.
Грищенко Е.К. Пьезоэлектрический поглотитель ультразвука пластинчатого типа // Акуст. журн. 1982. Т. 28. № 4. С. 486–488.
Коновалов С.И., Кузьменко А.Г. Демпфирование пьезопластины и использование электрической цепи на ее входе для получения короткого акустического импульса // Акуст. журн. 2005. Т. 51. № 6. С. 829–332.
Пьезокерамические преобразователи. Методы измерения и расчета параметров. Справочник / Под ред. Пугачева С.И. 1984.
Дополнительные материалы отсутствуют.
Инструменты
Акустический журнал