

Вестник Военного инновационного технополиса «ЭРА», 2023, T. 4, № 2, стр. 170-174
Разработка датчика углов крена и тангажа
Я. Н. Гусеница 1, *, С. А. Покотило 1, А. В. Ефремов 1, А. В. Малькута 1
1 Военный инновационный технополис “ЭРА”
Анапа, Россия
* E-mail: era_1@mil.ru
Поступила в редакцию 06.07.2023
После доработки 06.07.2023
Принята к публикации 05.10.2023
Аннотация
Проанализированы существующие датчики углового положения (наклона) различных объектов и оценены их достоинства и недостатки. Разработана оригинальная конструкция датчика углов тангажа и крена, который может быть использован при проведении топогеодезических работ, а также при разведке и прокладке маршрутов движения военной техники с целью оценки проходимости в условиях сложного ландшафта для исключения опрокидывания техники. Разработана рабочая конструкторская документация для изготовления опытного образца датчика в Военном инновационном технополисе “ЭРА”.
ВВЕДЕНИЕ
Датчики углового положения, также называемые инклинометрами, используются для измерения углов наклона стационарных и подвижных объектов относительно местной вертикали. Такие измерения востребованы в самых разных областях: для мониторинга вулканической активности и параметров движения оползней; при разведке полезных ископаемых; для контроля состояния опор мостов и линий электропередачи; для контроля углового положения опор уличного освещения, дорожных знаков и светофоров. Индикация углов тангажа и крена важна при эксплуатации морских судов. Кроме того, датчики наклона встраиваются в противоугонные системы транспортных средств, крепятся к упаковке товаров при транспортировке, позволяют регулировать положение солнечных панелей и имеют много других применений.
Важными характеристиками, которые следует учитывать при выборе таких датчиков, являются диапазон углов наклона и количество осей, относительно которых выполняют измерения. По технологиям, используемым для оценки углов наклона, датчики делятся на емкостные (наполненные жидкостью, с пузырьками газа в жидкости), электролитические, MEMS-акселерометры (устройства, объединяющие в себе взаимосвязанные механические и электрические компоненты микронных размеров для измерения углов) и инерционные IMU-системы (система, которая определяет свое положение в пространстве, используя свойства инерции тел, т.е. определяет, на какой угол и по какой оси она была повернута и была смещена относительно начальной точки).
В зависимости от объекта установки датчики углов наклона можно разделить на две категории:
– статические, используемые на таких статических объектах, как антенны, системы мониторинга состояния конструкций, солнечные панели (регулировка и отслеживание положения), выравнивание шасси для промышленных станков и инструменты для точного нивелирования;
– динамические – для измерения углов наклона подвижного объекта относительно его центра масс, например устройства активной защиты от опрокидывания сельскохозяйственной техники, в том числе в случаях, когда объект подвергается быстрым перемещениям, вибрации или ударам.
Одной из возможных областей применения датчиков наклона могут быть топогеодезические работы для описания, например, профиля горных дорог и определения наиболее опасных участков на них, а также для оценки рельефа картографируемой местности, в ходе которых возникает необходимость автоматизации измерений углов крена и тангажа. Для этих целей целесообразно использовать мобильный объект, на котором смонтирован датчик углов крена и тангажа. При этом измерения и регистрация величин углов должны вестись непрерывно в ходе перемещения мобильного объекта по заданному маршруту. Такие измерения могут быть востребованы при прокладке маршрутов движения военной техники в условиях сложного рельефа местности для исключения ее опрокидывания.
Анализ технических решений и конструктивных исполнений существующих датчиков углового положения показал, что в настоящее время простых в изготовлении и эксплуатации датчиков, которые позволяли бы с достаточным уровнем точности определять и регистрировать углы крена и тангажа, на рынке недостаточно [1–3].
Цель работы – предложить конструкцию датчика углов крена и тангажа, обладающую мировой новизной, изобретательским уровнем и промышленно применимую.
ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ
В 1748 г. Л. Эйлер для описания вращения твердого тела относительно неподвижной точки О ввел углы тангажа υ, крена γ и рыскания $\psi $, которые определяют положение тела в прямоугольной декартовой системе координат Оxyz, связанной с его центром масс, относительно аналогичной неподвижной системы координат Оx1y1z1 (рис. 1). Угол υ между осями Oz и Oz1 называют углом нутации. Лежащую на пересечении плоскостей Оxy и Оx1y1 нормаль K к плоскости Оzz1 называют линией узлов, угол γ между линией узлов и осью Оx – углом собственного вращения, угол $\psi $ между осью Оx1 и линией узлов – углом прецессии. Если угол υ равен 0 или π, то плоскости Оxy и Оx1y1 совпадают. В этом случае положение линии узлов неопределенно, поэтому неопределимы и значения углов прецессии и нутации (можно определить лишь их сумму или разность) [4].
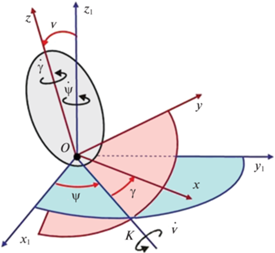
Положение подвижной системы координат относительно неподвижной системы координат при заданных углах Эйлера можно получить с помощью последовательных независимых поворотов тела:
– на угол ψ вокруг оси Оz1;
– на угол υ вокруг линии узлов ОK;
– на угол γ вокруг оси Оz.
Практическое использование при описании движения твердого тела нашли термины: “угол тангажа”, “угол крена”, “угол рыскания”:
– угол крена γ – угол между поперечной осью объекта и горизонтальной плоскостью;
– угол тангажа υ – угол между продольной осью объекта и горизонтальной плоскостью;
– угол рыскания $\psi $ – угол между продольной осью объекта и вертикальной плоскостью.
Разработанный датчик углов крена и тангажа представляет собой шарообразный корпус-резервуар, наполовину заполненный оптически прозрачной жидкостью требуемой вязкости (для обеспечения демпфирования поплавка от колебаний), в котором размещены чувствительный элемент (поплавок) со светоотражающей нижней поверхностью, фотоприемная матрица, в центре которой расположен источник оптического излучения, а также вычислительное устройство. Корпус-резервуар выполнен в виде полого шара, а чувствительный элемент – в виде диска, установленного в центре корпуса, при этом нижняя поверхность диска является отражающей в заданном диапазоне оптического излучения.
Источник и приемник оптического излучения установлены в нижней части корпуса, а определение величины углов крена и тангажа выполняется вычислительным устройством в зависимости от положения проекции отраженного поплавком оптического луча на фотоприемной матрице.
С целью повышения точности определения углов крена и тангажа в вычислительное устройство с датчиков ускорений мобильного объекта вводятся данные о его линейных ускорениях в продольном и боковом направлениях, что обеспечивает исключение погрешностей определения углов тангажа и крена при боковых и продольных ускорениях мобильного объекта.
Для привязки данных об углах крена и тангажа к координатам местности в вычислительное устройство вводятся текущие координаты мобильного объекта из навигационного модуля.
При достижении мобильным объектом закритических (недопустимых) углов крена и/или тангажа (например, на крутых склонах или на сильно пресеченной местности) для предупреждения оператора (водителя) вычислительное устройство датчика выдает электрический сигнал на срабатывание звуковой сигнализации, которая прекращается при возврате углов в диапазон допустимых значений.
Датчик тангажа и крена представлен на рис. 2–4. Конструкция заявляемого датчика углов крена и тангажа изображена на рис. 2, где использованы следующие обозначения: 1 – корпус-резервуар, 2 – жидкость, 3 – поплавок, 4 – отражающая поверхность поплавка, 5 – источник оптического излучения, 6 – приемник оптического излучения, 7 – вычислительное устройство, 8 – местная вертикаль, 9 – горизонтальная плоскость, при этом луч от источника оптического излучения 5 попадает на нижнюю часть поплавка 3 и, отражаясь от поверхности 4, попадает на приемник оптического излучения 6, который преобразует световой поток в электрический сигнал, поступающий в вычислительное устройство 7, которое и формирует данные об углах крена и тангажа относительно углов смещения луча источника излучения относительно местной вертикали.
Рис. 2.
Схема взаимного расположения элементов конструкции устройства: 1 – корпус-резервуар, 2 – жидкость, 3 – поплавок, 4 – отражающая поверхность поплавка, 5 – источник оптического излучения, 6 – приемник оптического излучения, 7 – вычислительное устройство, 8 – местная вертикаль, 9 – горизонтальная плоскость.
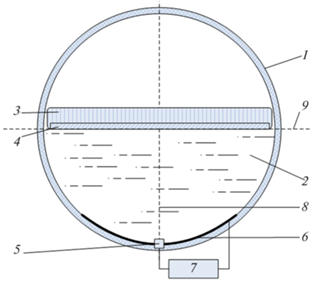
Рис. 3.
Системы координат мобильного объекта: (связанная) подвижная X1Y1Z1 и нормальная (неподвижная) XYZ.
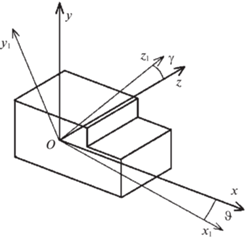
Устройство работает следующим образом. Отсчетной системой координат является нормальная (неподвижная) система координат XYZ, в которой ось ОY является местной вертикалью и перпендикулярна горизонтальной плоскости (рис. 3). При этом в начальный момент времени ось ОX совпадает с продольной осью мобильного объекта, а ось ОZ совпадает с его поперечной осью. Мобильный объект, на котором размещен датчик углов крена и тангажа, связан с подвижной системой координат X1Y1Z1. Центры подвижной и неподвижной систем координат совпадают. Объект, а следовательно, и подвижная система координат могут перемещаться относительно отсчетной горизонтальной плоскости по углам крена ±γ (плоскость Z1ОY1) и тангажа ±υ (плоскость Х1ОY1). Величины этих углов будут равны углам отклонений луча источника оптического излучения от местной вертикали.
В начальный момент оси неподвижной и подвижной, связанной с мобильным объектом, систем координат совпадают, и направление светового пучка источника оптического излучения (светодиода) 5, сфокусированного в центр корпуса-резервуара, совпадает с местной вертикалью 8, нижняя поверхность 4 поплавка 3 совпадет с плоскостью 9 горизонта, а угол между лучом источника излучения 5 (или лучом отраженного сигнала, попадающего на приемник 6) и местной вертикалью 9 будет равен нулю (соответственно, равны нулю углы крена и тангажа).
При появлении углового движения мобильного объекта подвижная система координат будет менять свое угловое положение относительно неподвижной системы, и жестко связанный с подвижной системой координат датчик углов крена и тангажа будет фиксировать углы крена и тангажа мобильного объекта относительно местной вертикали. Соответственно, будут менять свое угловое положение относительно местной вертикали все геометрические точки, расположенные внутри полости шара, в том числе точки расположения источника излучения и фотоприемной матрицы, отклоняясь от местной вертикали на один и тот же угол. В то же время поплавок датчика останется в горизонтальном положении и будет перпендикулярен местной вертикали при любых угловых перемещениях объекта.
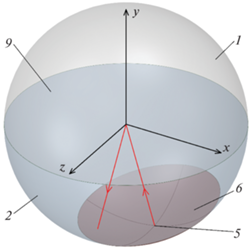
Угловые перемещения источника излучения и фотоприемной матрицы относительно местной вертикали возможны в продольной и поперечной плоскостях (рис. 3) по углу тангажа (угол между осями ОХ и ОX1) и по углу крена (угол между осями ОZ и ОZ1). Соответственно, за счет отклонения от местной вертикали зеркально отраженный поверхностью поплавка световой пучок в точке, совпадающей с центром шара корпуса-резервуара и попадающий на фотоприемную матрицу, будет нести информацию о величинах углов крена и тангажа, так как каждый элемент фотоприемной матрицы связан с величинами углов тангажа и крена (рис. 4).
Электрический сигнал с выхода приемника 6 фотоприемной матрицы поступает в вычислительное устройство 7, в котором регистрируется положение центра отраженного сигнала оптического излучения, угловые координаты которого будут соответствовать углам крена и тангажа. Изменения проекции отраженного поплавком луча на фотоприемной матрице будут соответствовать приращениям углов крена и тангажа. Фотоприемная матрица состоит из светочувствительных элементов, в горизонтальной плоскости имеет форму круга или прямоугольника. Плотность пикселей по всей площади матрицы одинаковая. Каждый пиксель матрицы соответствует строго определенным величинам углов крена и тангажа.
Выбор формы фотоприемной матрицы обусловливается диапазоном предельных углов крена/тангажа и технологичностью ее монтажа внутри шарообразной поверхности корпуса. При круглой форме матрицы предельно допустимые измеряемые углы крена и тангажа будут одинаковы, однако технологически смонтировать ее сложнее, чем при прямоугольной форме. Кроме того, прямоугольная форма матрицы при ориентации ее вдоль продольной оси мобильного объекта позволяет обеспечить измерение углов тангажа, которые в 2–3 раза превышают предельно допустимые для мобильного объекта углы крена. Размер пикселя матрицы составляет 12 мкм. Уменьшение размера пикселя (менее 12 мкм), с одной стороны, снижает светочувствительность матрицы и, с другой стороны, повышает уровень шумов [5, 6]. Кроме того, уменьшение размера пикселя ведет к увеличению стоимости матрицы.
Отраженный поплавком оптический луч от источника излучения облучает сразу несколько пикселей фотоприемной матрицы. В связи с этим для увеличения точности определения углов крена и тангажа вычислительным устройством проводятся усреднение электрического сигнала по пятну рассеивания падающего луча и вычисление координат в угловых единицах центра пятна в развернутой в плоскость фотоприемной матрицы, что обеспечивает увеличение точности определения углов тангажа и крена. Кроме того, с целью повышения точности определения углов крена и тангажа в вычислитель наряду с данными по углам крена и тангажа от датчиков ускорений вводятся данные о линейных ускорениях мобильного объекта в продольном и боковом направлениях (на рисунках не показано), что обеспечивает исключение погрешностей определения углов тангажа и крена при поворотах мобильного объекта и ускорениях при его движении.
Привязка данных об углах крена и тангажа к координатам местности проводится с помощью введения в вычислитель текущих координат мобильного объекта из навигационного модуля.
С целью предупреждения оператора (водителя) о достижении мобильным объектом закритических значений углов крена и тангажа (например, на крутых склонах или на сильно пресеченной местности) вычислительное устройство датчика выдает электрический сигнал на срабатывание звуковой сигнализации, которая прекращается при возврате углов в диапазон допустимых значений.
На разработанный датчик углов крена и тангажа подана заявка на изобретение [7], разработана рабочая конструкторская документация и на базе Военного инновационного технополиса “ЭРА” изготавливается его опытный образец. С учетом предполагаемого размещения датчика углов крена и тангажа на автотранспортных средствах военного назначения на гусеничном или колесном ходу датчик изготавливается с учетом требований к группе исполнения 1.4.2 ГОСТ РВ 20.39.304-98 [8].
ЗАКЛЮЧЕНИЕ
Разработанная конструкция датчика углов крена и тангажа отличается от существующих аналогов новизной и оригинальностью, простотой конструкции, высокой технологичностью изготовления, высокой точностью измерений углов крена и тангажа (не более 0.5°) и широкими функциональными возможностями применения по назначению.
Список литературы
Короп В.Я., Горшков Д.Г., Леонов Н.А. и др. Патент RU 2682589 Российская Федерация, МПК G01C 19/44 (2006.01), G01C 19/44 (2018.08). Датчик крена и тангажа: № 2018123123: заявл. 25.06.2018: опубл. 19.03.2019.
Заец В.Ф., Калабухов В.С., Качанов Б.О. и др. Патент RU 2714144 Российская Федерация, МПК G01C 23/00 (2006.01), G01C 23/00 (2019.08). Малогабаритная адаптивная курсовертикаль: № 2016150691: заявл. 22.09.2016: опубл. 12.02.2020.
Alattar Zaid M., Dennes Albert E., Figueroa Ernesto E. et al. Patent US 9581444 B2 CPC Class G01, Electronic roll pitch and yaw sensor using conductive fluid. Application Number: US-201514753540-A, Application Date: 2015-06-28, Grant Date: 2017-02-27.
Самсонов В.А. Эйлера углы // Большая российская энциклопедия. Электронная версия. 2020. https://bigenc.ru/physics/text/4940239
Медведев В. Таблица характеристик матриц цифровых фотоаппаратов. 2017. https://vt-tech.eu/articles/foto/277-tablitsa-kharakteristik-matrits-tsifrovykh-otoapparatov.html
Андреев В. Как узнать размер пикселя матрицы? 2021. https://vasili-photo.com/articles/pixel-size.html
Гусеница Я.Н., Ефремов А.В., Чернов В.И., Малькута А.В., Покотило С.А. Заявка на изобретение № 2021140001/28, МПК G01C 1/00 (2006.01). Датчик углов крена и тангажа: заявл. 30.12.2021.
ГОСТ РВ 20.39.304-98. Комплексная система общих технических требований. Аппаратура, приборы, устройства и оборудование военного назначения. Требования стойкости к внешним воздействующим факторам. М.: Стандартинформ, 2015. С. 54.
Дополнительные материалы отсутствуют.
Инструменты
Вестник Военного инновационного технополиса «ЭРА»