

Известия РАН. Механика жидкости и газа, 2022, № 5, стр. 141-150
МОДЕЛЬ ДИНАМИЧЕСКОГО СРЫВА ПОТОКА С ПРОФИЛЯ, ПРИМЕНИМАЯ ПРИ БОЛЬШИХ УГЛАХ ОТКЛОНЕНИЯ ЗАКРЫЛКА НА ЗАДНЕЙ КРОМКЕ
Shi-Long Xing a, He-Yong Xu a, *
a National Key Laboratory of Science and Technology on Aerodynamic Design and Research,
Northwestern Polytechnical University
Xi’an, P.R. China
* E-mail: xuheyong@nwpu.edu.cn
Поступила в редакцию 30.11.2021
После доработки 20.12.2021
Принята к публикации 21.12.2021
- EDN: WGZJQU
- DOI: 10.31857/S0568528122030161
Аннотация
Предложена модель динамического срыва потока с профиля с закрылком на задней кромке, основанная на нейронной сети с долгосрочной кратковременной памятью (LSTM). В модели рассматриваются нелинейные аэродинамические силы, вызванные большим углом отклонения закрылка. Использован численный метод, основанный на нестационарных, осредненных по Рейнольдсу уравнениях Навье–Стокса (URANS). Рассчитаны коэффициенты аэродинамических сил, действующих на профиль при различных законах отклонения закрылка в ходе движения по тангажу. Результаты показывают, что максимальное значение коэффициента подъемной силы может уменьшиться на 15.4%, а максимальные значения коэффициента сопротивления и момента тангажа могут уменьшиться на 34.8 и 31.8% соответственно. Посредством закрылка можно эффективно снизить нагрузку, испытываемую профилем от момента тангажа при динамическом срыве вихрей. Полученные данные по коэффициентам аэродинамических сил использованы для обучения модели. Результаты, полученные на основе модели, показывают, что она в состоянии достаточно точно определить характеристики динамического срыва потока с профиля. Обсуждается влияние гиперпараметров нейронной сети с долгосрочной кратковременной памятью на предсказательные возможности модели. Последние тем выше, чем больше количество шагов по времени в реализации и количество входных параметров.
Нестационарное поле течения у несущего винта вертолета в поступательном горизонтальном полете чрезвычайно сложно. В результате совместного действия вращения лопасти и поступательного полета имеют место сильные изменения числа Маха по размаху лопасти. Таким образом, при различных углах азимута у лопасти могут иметь место течения нескольких различных типов. В концевой области на опережающей лопасти имеет место трансзвуковое течение с ударными волнами, а на отступающей лопасти возникает обратное течение, сопровождающееся срывом потока. Нестационарный след, состоящий из сошедших следов и концевых вихрей, создает очень сложные аэродинамические нагрузки на лопасти несущего винта. Нестационарные аэродинамические силы взаимодействуют с длинными и гибкими лопастями, создавая большие вибрационные нагрузки и шум [1]. Вибрационные нагрузки распространяются внутрь корпуса, приводя к вибрациям в различных точках последнего. Вибрации корпуса снижают уровень комфорта пилота и пассажиров и сокращают усталостную выносливость механических, структурных и электронных компонентов. Шум также является важным фактором при проектировании вертолетов [2]. В настоящее время имеются разработки по активному управлению вибрациями и снижению шума несущего винта, основанные на концепции интеллектуального несущего винта.
Благодаря быстрому развитию интеллектуальных материалов, имеет место значительный прогресс в развитии интеллектуальных роторов, основанных на таких материалах [3]. Использование таких роторов представляет собой своего рода технологию активного управления несущим винтом вертолета, где интеллектуальная конструкция, изготовленная из интеллектуальных материалов, действует, как актуатор. Интеллектуальная конструкция заставляет закрылок отклоняться таким образом, чтобы достичь снижения вибрации и шума при улучшении рабочих характеристик. Интеллектуальный несущий винт, рассматриваемый ниже, использует закрылок на задней кромке. Благодаря потенциальным возможностям интеллектуального несущего винта в подавлении вибраций и шумов и улучшении рабочих характеристик, он завоевал одно из центральных мест в исследованиях технологий несущих винтов вертолетов [4]. В настоящее время исследования по интеллектуальным несущим винтам в основном сосредоточены на снижении вибраций и шума от взаимодействия лопасти и вихрей в диапазоне относительно малых скоростей [2]. В будущем такие исследования будут развиваться в направлении снижения вибраций и шума во всем диапазоне параметров полета, т.е. и в условиях высоких скоростей и больших нагрузок. Для традиционных вертолетов с основным несущим винтом и хвостовым ротором отступающая лопасть находится под бóльшим углом атаки, чем опережающая, чтобы уравновесить момент крена в поступательном полете. В условиях высоких скоростей и больших нагрузок, благодаря большому углу атаки, на отступающей лопасти разовьется динамический срыв потока. Под динамическим срывом понимается явление задержки срыва за пределы статического угла атаки срыва вследствие нестационарного движения несущих поверхностей [5]. Динамический срыв приводит к чрезмерным нагрузкам на лопасти при тангаже. Он является одним из факторов, ограничивающих область полетных режимов вертолета. Согласно имеющимся данным исследований, для эффективного уменьшения нагрузки на профиль, создаваемой моментом тангажа в ходе динамического срыва потока, требуется большой (больше чем 10°) угол отклонения закрылка [6–8]. Разумно предположить, что относительно большой угол отклонения закрылка требуется и для снижения вибрационной нагрузки на ротор, вызванной динамическим срывом вихря. Поскольку при конструировании и испытании новых конфигураций в начальной стадии этого процесса важную роль играет численное моделирование, возникает необходимость создания модели динамического срыва потока, которая могла бы с достаточной точностью рассчитать аэродинамические силы, действующие на профиль при больших углах отклонения закрылка.
В большинстве опубликованных работ по интеллектуальным несущим винтам вертолетов снижение вибраций и шума и улучшение рабочих характеристик анализируются без учета динамического срыва потока [4, 9–12]. Лишь в небольшом числе исследований этот фактор включен в рассмотрение [13–15]. В этих работах аэродинамические силы, действующие на закрылок, рассчитываются в линейном приближении [16–19]. Нелинейные аэродинамические силы, создаваемые большими углами отклонения закрылка, не рассматриваются и поэтому предложенные методики в состоянии рассчитать силы, действующие на профиль, лишь когда закрылок отклонен на малый угол (менее 5°). Модель динамического срыва потока с профиля, разработанная в настоящей работе и основанная на нейронной сети с долгосрочной кратковременной памятью, пригодна для вычислений при больших углах отклонения закрылка. Проведено обучение данной модели и выполнена оценка ее точности и устойчивости (robustness) на основании полученных при ее помощи результатов. Анализируется влияние гиперпараметров сети на предсказательную точность модели. Этот анализ сосредоточен на влиянии количества шагов по времени и входных переменных в конкретной реализации на точность результатов.
1. ОСОБЕННОСТИ ЗАКРЫЛКА И ЗАКОН ЕГО ДВИЖЕНИЯ
Рассматривается профиль SC1095 при числе Маха набегающего потока 0.302 и числе Рейнольдса, вычисленном по длине хорды, $3.89 \times {{10}^{6}}$. Профиль совершает движение тангажа относительно линии четвертей хорд по следующему закону
(1.1)
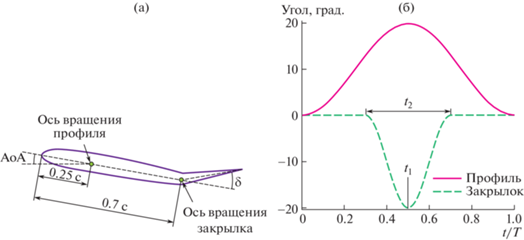
$\alpha \left( t \right) = {{\alpha }_{0}} + {{\alpha }_{m}} \cdot \sin \left( {\omega t - \pi {\text{/}}2} \right)$На рис. 1а представлена схематическая картина отклонения закрылка на задней кромке; здесь c – длина хорды профиля, а длина хорды закрылка равна 0.3c. Отклонение закрылка происходит по синусоидальному закону вокруг оси вращения закрылка. Угол отклонения δ отрицателен, когда закрылок отклоняется вверх. При численном моделировании просвет между профилем и закрылком не принимается во внимание. На рис. 1б представлены законы движения профиля и закрылка в течение одного цикла движения по тангажу. Здесь t/T – безразмерное время в пределах цикла, t1 – момент времени, когда угол отклонения закрылка имеет минимальное значение δmin и t2 – интервал времени, в течение которого происходит отклонение закрылка.
2. МЕТОД ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ ТЕЧЕНИЯ
При моделировании нестационарного поля течения около профиля численно решаются нестационарные, осредненные по Рейнольдсу уравнения Навье–Стокса (URANS) для сжимаемого газа. Для замыкания системы уравнений используется модель турбулентности Спаларта–Аллмараса. Уравнения дискретизируются при помощи метода конечных объемов. Конвективные члены дискретизируются по схеме AUSM+-up, а вязкие потоки по центральной схеме Джеймсона второго порядка. Интегрирование по физическому времени осуществляется посредством метода двойного времени. Интегрирование по псевдовремени использует неявную схему Гаусса–Зейделя с нижней и верхней прогонкой (LU-SGS), которая может эффективно увеличивать шаг по времени, повышая эффективность расчетов. В нестационарных расчетах используется алгоритм деформации сетки, основанный на радиальной базисной функции. Этот алгоритм в различных условиях порождает много низкокачественных сеток, особенно когда закрылок отклонен на большой угол. Помимо алгоритма деформации сетки, основанного на радиальной базисной функции, расчеты на динамической сетке используют алгоритм сглаживания сетки, предложенный в работе [21], гарантирующий высокое качество сеток при всех условиях. Метод численного моделирования течения проверялся в работе [22].
3. МОДЕЛЬ ДИНАМИЧЕСКОГО СРЫВА ПОТОКА, ИСПОЛЬЗУЮЩАЯ НЕЙРОННУЮ СЕТЬ С ДОЛГОСРОЧНОЙ КРАТКОВРЕМЕННОЙ ПАМЯТЬЮ
Нейронная сеть с долгосрочной кратковременной памятью (LSTM) была предложена в 1997 г. в работе [23]. Она представляет собой один из видов рекуррентных нейронных сетей и позволяет преодолеть проблемы устойчивости, свойственные обычным рекуррентным нейросетям, таким как исчезновение и взрыв градиента [24]. Центральной идеей, на которой основана архитектура LSTM, является ячейка памяти, которая может сохранять свое состояние во времени, и нелинейные блоки селекции, управляющие потоками информации, направленными внутрь и из ячейки [25]. Распространенная на всю временнýю область, LSTM нейросеть может рассматриваться как многослойная нейронная сеть. При наличии достаточного количества шагов по времени соответствующая LSTM нейросеть может рассматриваться как глубокая нейронная сеть. Архитектура ячейки LSTM показана на рис. 2а. Она состоит из различных структур затвора и является основным модулем LSTM нейросети [25]. Ячейка памяти ${{C}_{t}}$ предназначена для хранения информации в LSTM; это означает, что выходные данные с текущего шага по времени содержат входную информацию предыдущих шагов по времени. Специальные структуры затвора, как затвор входа ${{i}_{t}}$, затвор выхода ${{o}_{t}}$ и забывающий затвор ${{f}_{t}}$, управляют распространением информации в нейросети. Функция активации и гиперболический тангенс выражаются следующим образом
(3.2)
${\text{tanh}}\left( x \right) = \frac{{{{e}^{x}} - {{e}^{{ - x}}}}}{{{{e}^{x}} + {{e}^{{ - x}}}}}$(3.3)
${{o}_{t}} = \sigma \left( {{{W}_{o}} \cdot \left[ {{{y}_{{t - 1}}},{{x}_{t}}} \right] + {{b}_{o}}} \right)$Рис. 2.
Архитектура ячейки долговременной краткосрочной памяти (а) и схематическая диаграмма базовой модели (б).

На рис. 2б показана базовая модель динамического срыва потока, основанная на LSTM нейросети. Входной слой состоит из шести входных переменных, включая угол атаки, скорость изменения угла атаки, ускорение угла атаки, угол отклонения закрылка, скорость изменения угла отклонения закрылка и ускорение угла отклонения закрылка. Спрятанный слой состоит из 90 ячеек LSTM. Выходной слой включает в себя коэффициенты подъемной силы, сопротивления и момента тангажа. В качестве функции потерь при определении коэффициентов аэродинамических сил используется среднеквадратичная ошибка. Программирование, обучение и тестирование LSTM нейросети проводились при помощи открытой библиотеки Keras. Коэффициенты аэродинамических сил рассчитывались на основе уравнений URANS при различных законах движения закрылка. Значения δmin были 0, –5°, –10°, –15° и –20°. Значения ${{t}_{1}}$ были 0.4, 0.5 и 0.6. Значения ${{t}_{2}}$ были 0.05, 0.1, 0.15, 0.2, 0.4, 0.6, 0.8 и 1.0. Кривые изменения нестационарных аэродинамических коэффициентов получены при 59 различных законах движения профиля. Важной проблемой при машинном самообучении является предварительная обработка данных. Качество массивов данных сильно влияет на обучение модели. Поэтому данные отдельных реализаций нормализуются, чтобы исключить выходящие из общего ряда данные, которые могли бы замедлить процесс обучения модели или даже привести к отсутствию сходимости [26]. Эти реализации подразделяются на используемые при обучении и при тестировании. Процесс обучения состоит из двух этапов: расчет в прямом направлении и обратное распространение ошибки во времени. В прямом расчете определяются значения на выходном слое. Различия между значениями, полученными при помощи модели и в гидродинамическом расчете, представляют собой ошибки модели. Алгоритм обратного распространения ошибки во времени передает ошибки модели назад во временнóй области и обновляет веса и отклонения модели. Для минимизации ошибки обучения и устранения минимальных локальных значений используется оптимизатор Adam с соответствующей скоростью обучения.
4. ОБСУЖДЕНИЕ РЕЗУЛЬТАТОВ
4.1. Влияние отклонения закрылка вверх на динамический срыв потока
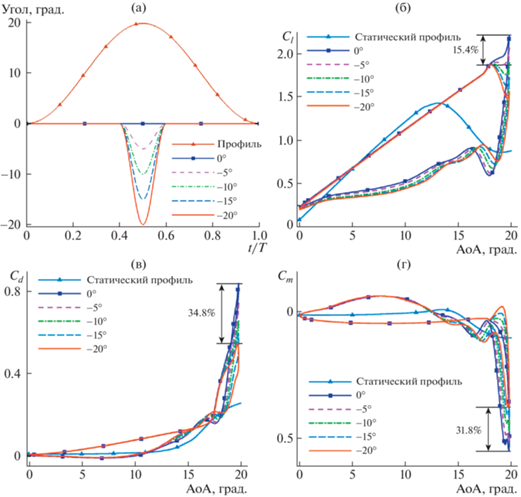
На рис. 3а представлены зависимости от времени угла атаки профиля и угла отклонения закрылка в течение одного цикла движения по тангажу при различных минимальных углах отклонения закрылка; ${{t}_{1}}{\text{\;}}$= 0.5, ${{t}_{2}}{\text{\;}}$ = 0.2, а δmin принимает значения 0, –5°, –15° и –20°. На рис. 3б–3г проведено сравнение коэффициентов аэродинамических сил, действующих на профиль, при различных значениях δmin. По сравнению со случаем статического профиля, динамический срыв потока с профиля задерживается, а угол атаки, соответствующий срыву, возрастатет, благодаря быстрому движению профиля вверх. По сравнению со случаем статического профиля, максимальный коэффициент подъемной силы выше, также как и коэффициенты сопротивления и момента тангажа. Когда δmin = –20°, максимальный коэффициент подъемной силы динамического профиля уменьшается на 15.4%, а максимальные коэффициенты сопротивления и момента тангажа уменьшаются на 34.8 и 31.8% соответственно. Это показывает, что закрылок на задней кромке может, благодаря динамическому срыву, эффективно снизить нагрузку, создаваемую моментом тангажа. Чем больше угол отклонения закрылка вверх, тем сильнее эффект уменьшения нагрузки, создаваемой моментом тангажа.
4.2. Коэффициент подъемной силы статического профиля при различных углах отклонения закрылка
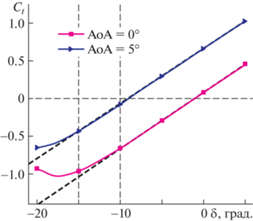
В предыдущем разделе обсуждалось уменьшение нагрузки, создаваемой моментом тангажа, при помощи закрылка на задней кромке. Результаты показывают, что пиковое значение коэффициента момента тангажа значительно уменьшается, когда δmin = –20°. Согласно общим гидродинамическим представлениям, обширная отрывная область появляется вблизи задней кромки профиля, когда угол отклонения закрылка равен –20°, а угол атаки равен нулю. Появление обширной отрывной зоны приводит к нелинейному изменению коэффициента подъемной силы. На рис. 4 представлены зависимости коэффициента подъемной силы статического профиля от угла отклонения закрылка. Когда угол отклонения больше –10°, а угол атаки равен нулю, коэффициент подъемной силы растет линейно с углом отклонения. При углах отклонения, меньших –10°, коэффициент подъемной силы нелинейно увеличивается с углом отклонения; при этом у задней кромки профиля возникает зона отрыва потока. Когда угол отклонения закрылка равен –20°, эта область отрыва становится весьма обширной. Когда угол отклонения закрылка меньше –15°, а угол атаки равен 5°, коэффициент подъемной силы нелинейно увеличивается с углом отклонения. Из поведения двух кривых на рис. 4 следует, что коэффициент подъемной силы изменяется нелинейно, после того как угол между закрылком и набегающим потоком превысит 10°. В настоящей работе принимается, что закрылок находится в состоянии большого отклонения, когда он отклонен вверх более чем на 10°, т.е. угол отклонения закрылка меньше, чем –10°. Соответствующие данные из предыдущего раздела показывают, что уменьшение нагрузки, создаваемой моментом тангажа, требует больших углов отклонения закрылка. Существующие модели аэродинамических сил, создаваемых закрылком, будучи основаны на линейных допущениях, не способны точно рассчитать нелинейные аэродинамические силы при больших углах отклонения закрылка. Соответствующие модели динамического отрыва также не могут точно рассчитать аэродинамические силы, действующие на профиль. Таким образом, возникает необходимость разработки модели динамического срыва потока с учетом нелинейного характера аэродинамических сил, возникающих при больших углах отклонения закрылка.
4.3. Расчет коэффициентов аэродинамических сил, действующих на профиль
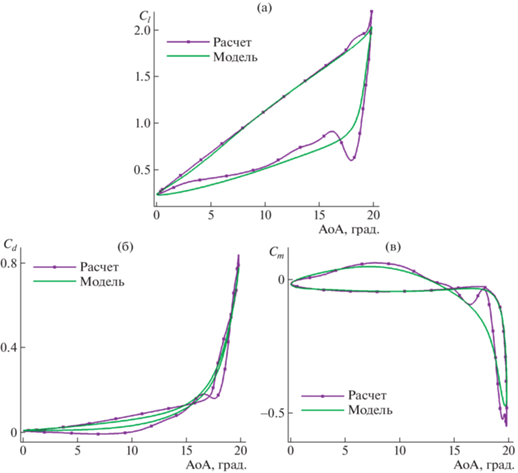
На рис. 5 проведено сравнение коэффициентов аэродинамических сил, действующих на рассматриваемый профиль, полученных согласно данной модели и в гидродинамическом расчете. Кривые для коэффициента подъемной силы имеют в целом одинаковый наклон. Максимальное значение коэффициента подъемной силы в модели несколько ниже, чем в гидродинамическом расчете. Пик коэффициента сопротивления, определенный по модели, хорошо согласуется с данными гидродинамического расчета. Пик коэффициента момента тангажа, определенный по модели, ниже, чем определенный в гидродинамическом расчете. Все эти данные свидетельствуют о том, что модель динамического срыва, основанная на LSTM нейросети, в состоянии эффективно предсказывать значения коэффициентов аэродинамических сил в случае динамического срыва потока.
4.4. Влияние количества шагов по времени в реализации
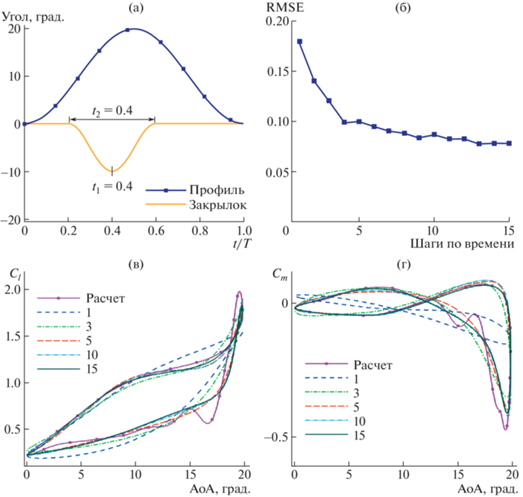
На рис. 6 приведены законы движения профиля и закрылка, на которых тестируется модель, и зависимость среднеквадратичной ошибки (RMSE) от количества шагов по времени, а также сравниваются аэродинамические коэффициенты, полученные согласно модели и в гидродинамическом расчете. Проанализировано влияние количества шагов по времени in a sample на результаты модели; как видно, ошибка модели непрерывно уменьшается с увеличением числа шагов по времени. Когда это число равно единице, ошибка модели весьма велика, а значения коэффициентов момента тангажа, предсказываемые моделью, существенно отличаются от значений, полученных в гидродинамическом расчете. При количестве шагов по времени, большем чем 4, модельные значения коэффициентов аэродинамических сил почти идентичны расчетным.
4.5. Влияние входных переменных
В настоящем разделе анализируется влияние количества входных параметров на точность предсказаний модели. Соответствующие законы движения профиля и закрылка построены на рис. 6а. Схематическая диаграмма базовой модели представлена на рис. 2б. Когда количество входных параметров равно 2, этими параметрами являются угол атаки профиля и угол отклонения закрылка. Когда количество входных параметров равно 4, они также включают скорости изменения угла атаки и угла отклонения закрылка. Наконец, когда количество входных параметров равно 6, они включают и ускорения угла атаки и угла отклонения закрылка. Как следует из рис. 7а, ошибка предсказаний модели убывает с увеличением числа входных параметров. Предсказанные моделью значения коэффициентов аэродинамических сил значительно изменяются при различных количествах входных данных (рис. 7б–7г). Когда в качестве входных параметров используются лишь угол атаки профиля и угол отклонения закрылка, модель не в состоянии предсказать петлю гистерезиса в поведении коэффициента подъемной силы. Когда число входных параметров больше или равно 4, т.е., когда входная информация является пространственной, модель точно предсказывает аэродинамические коэффициенты профиля.

ЗАКЛЮЧЕНИЕ
Численно исследовано влияние отклонения вверх закрылка, расположенного на задней кромке профиля, на динамический срыв потока. Отклонение закрылка на большой угол может эффективно снизить нагрузку, создаваемую моментом тангажа при динамическом срыве потока. При незначительном уменьшении максимального коэффициента подъемной силы профиля максимальные значения коэффициентов сопротивления и момента тангажа уменьшаются значительно. Коэффициент подъемной силы растет нелинейно при увеличении угла отклонения закрылка, после того как закрылок оказывается в состоянии большого отклонения для статических профилей. Однако существующие модели аэродинамических сил, создаваемых закрылком, основаны на линейных предположениях. Отсюда следует необходимость разработки модели динамического срыва потока, учитывающей нелинейный характер аэродинамических сил при больших углах отклонения закрылка. Такая модель могла бы в будущем использоваться как инструмент для аккуратного исследования и проектирования интеллектуальных роторов. В связи с этим в работе построена модель динамического срыва потока, основанная на нейронной сети с краткосрочной долговременной памятью. Полученные результаты показывают, что данная модель может достаточно точно предсказывать значения коэффициентов аэродинамических сил при движении тангажа. Анализ гиперпараметров нейронной сети показывает, что на точность предсказаний модели большое влияние оказывает выбранное число шагов по времени. Чем больше число шагов в реализации и чем больше количество входных параметров, тем выше точность предсказанных результатов.
Работа частично поддержана Национальным фондом естественных наук Китая (грант № 11972306), Головной лабораторией аэродинамики роторов (грант № RAL20200102-2) и проектом 111 Китая (B17037). Авторы благодарят Центр высокопроизводительных вычислений Северозападного Политехнического Университета за предоставленные вычислительные услуги.
Список литературы
Johnson W. Helicopter theory. Dover Publ., 1980.
Friedmann P.P. On-blade control of rotor vibration, noise, and performance: just around the corner? // J. Amer. Helicopter Soc. 2014. V. 59. № 4.
Chopra I. Review of state of art of smart structures and integrated systems // AIAA J. 2002. V. 40. № 11. P. 2145–2187.
Straub F.K., Anand V.R., Lau B.H., Birchette T.S. Wind tunnel test of the smart active flap rotor // J. Amer. Helicopter Soc. 2018. V. 63. № 1. P. 16.
McCroskey W.J. The phenomenon of dynamic stall // Tech. Rep. NASA-TM-81264, 1981.
Feszty D., Gillies E.A., Vezza M. Alleviation of airfoil dynamic stall moments via trailing-edge-flap flow control // AIAA J. 2004. V. 42. № 1. P. 17–25.
Raiola M., Discetti S., Ianiro A., Samara F., Avallone F., Ragni D. Smart rotors: dynamic-stall load sontrol by means of an actuated flap // AIAA J. 2018. V. 56. № 4. P. 1388–1401.
Samara F., Johnson D.A. Dynamic stall on pitching cambered airfoil with phase offset trailing edge flap // AIAA J. 2020. V. 58. № 7. P. 2844–2856.
Patt D.A. Simultaneous BVI noise and vibration reduction in rotorcraft using actively-controlled flaps and including performance considerations / Univ. Michigan, PhD Thesis, 2004.
Kody F., Corle E., Maughmer M.D., Schmitz S. Higher-harmonic deployment of trailing-edge flaps for rotor-performance enhancement and vibration reduction // J. Aircraft. 2016. V. 53. № 2. P. 333–342.
Salazar D., Kottapalli S., Hagerty B. Boeing smart rotor full-scale wind tunnel test data report / NASA TM-2016-216048, 2016.
Tan J.F., Sun Y.M., Wang H.W., Lin C.L. New approach for aerodynamic and aeroacoustic analysis of actively controlled flaps rotor // J. Aircraft. 2018. V. 55. № 6. P. 2191–2202.
Depailler G., Friedman P.P. Alleviation of dynamic stall induced vibrations in helicopter rotors using actively controlled flaps / AIAA Paper No. 1431, 2002.
Liu L., Friedmann P.R., Kim I., Bernstein D.S. Rotor performance enhancement and vibration reduction in presence of dynamic stall using actively controlled flaps // J. Amer. Helicopter Soc. 2008. V. 53. № 4. P. 338–350.
Wang R., Xia P.Q. Control of dynamic stall of helicopter rotor blades // Sci China-Technol Sci. 2013. V. 56. № 1. P. 171–180.
Hariharan N., Leishman J.G. Unsteady aerodynamics of a flapped airfoil in subsonic flow by indicial concepts // J. Aircraft. 1996. V. 33. № 5. P. 855–868.
Myrtle T.F., Friedmann P.P. Application of a new compressible time domain aerodynamic model to vibration reduction in helicopters using an actively controlled flap // J. Amer. Helicopter Soc. 2001. V. 46. № 1. P. 32–43.
Peters D.A., Hsieh M.C.A., Torreto A. A state-space airloads theory for flexible airfoils // J. Amer. Helicopter Soc. 2007. V. 52. № 4. P. 329–342.
Andersen P.B., Gaunaa M., Bak C., Hansen M.H. A dynamic stall model for airfoils with deformable trailing edges // Wind Energy. 2009. V. 12. № 8. P. 734–751.
McCroskey W.J., Mcalister K.W., Carr L.W. An experimental study of dynamic stall on advanced airfoil sections. Volume 1: Summary of the experiment, 1982.
Canann S.A., Tristano J.R., Staten M.L. An approach to combined Laplacian and optimization-based smoothing for triangular, quadrilateral, and quad-dominant meshes. 2000.
Xing S.L., Xu H.Y., Ma M.S., Ye Z.Y. Inflatable leading edge-based dynamic stall control considering fluid-structure interaction // Int. J. Aerosp. Eng. 2020. 2020:28.
Hochreiter S., Schmidhuber J. Long short-term memory // Neural Comput. 1997. V. 9. № 8. P. 1735–1780.
Li W.J., Laima S.J., Jin X.W., Yuan W.Y., Li H. A novel long short-term memory neural-network-based self-excited force model of limit cycle oscillations of nonlinear flutter for various aerodynamic configurations // Nonlinear Dyn. 2020. V. 100. № 3. P. 2071–2087.
Greff K., Srivastava R.K., Koutnik J., Steunebrink B.R., Schmidhuber J. LSTM: A search space Odyssey // IEEE. Trans. Neural Netw. Learn. Syst. 2017. V. 28. № 10. P. 2222–2232.
Wu C.L., Chau K.W., Fan C. Prediction of rainfall time series using modular artificial neural networks coupled with data-preprocessing techniques // J Hydrol. 2010. V. 389. № 1-2. P. 146–167.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Механика жидкости и газа