

Известия РАН. Механика твердого тела, 2022, № 5, стр. 47-57
ЗАДАЧА НЕЛИНЕЙНОГО ИЗГИБА КОНСОЛИ В ЭЛЕМЕНТАРНЫХ ФУНКЦИЯХ
a Институт прикладной математики и автоматизации Кабардино-Балкарского научного центра Российской академии наук (ИПМА КБНЦ РАН)
Нальчик, Россия
* E-mail: anaha13@mail.ru
Поступила в редакцию 07.08.2021
После доработки 08.10.2021
Принята к публикации 11.10.2021
- EDN: SHKBBU
- DOI: 10.31857/S057232992204002X
Аннотация
Приводится аналитическое решение нелинейной задачи изгиба консоли вертикальной силой, представленное в элементарных функциях с расчетными формулами по прямому определению основных параметров изгибаемой консоли в зависимости от заданной величины силовой нагрузки (модуля), таких как – координаты очертания консоли, изгибаемые углы и кривизна по длине консоли, моменты сил и внутренняя энергия изгиба, а также упрощенные формулы для нахождения координат свободного конца консоли. Сравнение полученных расчетных значений с графическими и табличными данными известных численных (точных) решений дало достаточно высокую сходимость результатов (<1–2%), приведены примеры расчета. Полученные результаты могут быть использованы также для определения (обратным методом) жесткости стержней консолей произвольного поперечного сечения, либо модуля упругости материала консоли при известных сечениях, в том числе при конструировании защитных сооружений от опасных склоновых геофизических процессов.
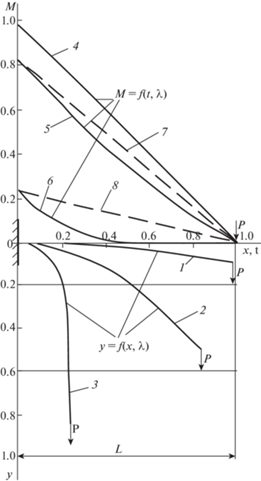
1. Введение. Изгиб консоли тонкого упругого горизонтального стержня длиной $L$, жестко защемленного одним (левым) концом в центре координат $xOy$, возникает при воздействии на другой свободный конец поперечной вертикальной статической силы $P$ (рис. 1). При этом, как известно, уравнение равновесия такого стержня имеет вид [1, 2]
в котором $E$ – модуль упругости (модуль Юнга); J – момент инерции; $EJ$ – изгибная жесткость стержня; l и ${{\theta }}\left( l \right)$ – текущие значения длины (неизменной) дуги стержня и угла между касательной к текущей точке стержня и осью $0x$.Рис. 1.
Расчетная схема изгиба горизонтальной консоли от вертикальной силы $P$: кривые 1–3 – очертания консоли $y = f\left( {x,{{\lambda }}} \right)$ для заданных значений модуля ${{\lambda }} = $ $\sqrt {0.6} $, $\sqrt {0.85} $, $\sqrt {0.99999} $; кривые 4–6 и 4, 7, 8 – графики моментов сил $M = f\left( {t,{{\lambda }}} \right)$ по длине консоли для тех же значений модуля ${{\lambda }}$, соответственно, для нелинейной и линейной задач.
Выражение (1.1) преобразовывается в нелинейное уравнение маятника [1–4]
(1.2)
$\frac{{{{d}^{2}}{{\theta }}}}{{d{{l}^{2}}}} + \frac{P}{{EJ}}\sin \left( {{{\theta }} + \frac{{{\pi }}}{2}} \right) = \frac{{{{d}^{2}}{{\gamma }}}}{{d{{t}^{2}}}} + {{{{\beta }}}^{2}}\sin {{\gamma }} = 0$2. Постановка задачи. Решение уравнения (1.2) представляется в виде зависимостей [1–3]
(2.1)
${{\gamma }}\left( t \right) = 2\arcsin \left[ {{{\lambda }} \cdot {\text{sn}}\left( {{{\beta }}t + F\left( {{{\varphi ,\lambda }}} \right),{{\lambda }}} \right)} \right],\quad \frac{{d{{\gamma }}\left( t \right)}}{{dt}} = 2 \cdot {{\lambda \beta }} \cdot {\text{cn}}\left[ {{{\beta }}t + F\left( {{{\varphi ,\lambda }}} \right),{{\lambda }}} \right]$При этом с учетом граничных условий, равных: $t = 0$ → ${{\theta }}\left( 0 \right) = 0$, ${{\gamma }}\left( 0 \right) = \frac{{{\pi }}}{2}$ и $t = 1$ → → $\frac{{d{{\theta }}\left( L \right)}}{{dl}} = 0$, $\frac{{d{{\gamma }}\left( 1 \right)}}{{dt}} = 0$ из зависимостей (2.1) после преобразований следует значение эллиптического синуса Якоби, равное
откуда выразим зависимости [2, 3, 5, 6] для определения значений амплитуды
(2.2)
$F\left( {{\varphi }} \right) = F\left[ {\arcsin \left( {\frac{{\sqrt 2 }}{{2{{\lambda }}}}} \right)} \right]$В вышеприведенных формулах (2.1)–(2.3) значения ${{\lambda }}$ и $F\left( {{\varphi }} \right)$ находятся в зависимости от силовой нагрузки ${{\beta }}$ методом подбора при известном $P$ – задаваясь ${{\lambda }}$ в формуле для определения критической нагрузки [2, 3]:
(2.4)
$\frac{P}{{{{P}_{c}}}} = {{\left( {\frac{{2{{\beta }}}}{{{\pi }}}} \right)}^{2}} = 4{{\left[ {\frac{{K - F\left( {{\varphi }} \right)}}{{{\pi }}}} \right]}^{2}}$По результатам интегрирования соотношений $\frac{{dx}}{{dl}} = \cos {{\theta }}$, $\frac{{dy}}{{dl}} = \sin {{\theta }}$ и преобразований представлены следующие расчетные зависимости (2.5) для описания очертания упругого стержня [1–3] при L = 1 (в усл. ед.):
(2.5)
$x = \frac{{2{{\lambda }}}}{{K - F\left( {{\varphi }} \right)}}[\sqrt {1 - 0.5{{{{\lambda }}}^{{ - 2}}}} - {\text{cn}}\left( u \right)]$3. Метод и построение решения. Следует отметить, что аналитическое решение различных прикладных задач механики с эллиптическими функциями Якоби и эллиптическими интегралами 1 и 2 рода (не выражающимися через элементарные функции) представляет собой значительные математические трудности, связанные, в том числе, с использованием специальных графиков и таблиц и необходимостью нелинейного, перекрестного и обратного интерполирования их данных. В то же время, используемые в настоящее время математические программы позволяют на основе численных решений находить значения эллиптических функций и интегралов с заданной точностью – однако, при этом результаты получаются в “цифрах” и только для отдельных дискретных точек. Указанное не позволяет получить общее аналитическое решение в элементарных функциях более сложной и многокомпонентной задачи, в которую отдельными “фрагментами” могут входить специальные функции, что ограничивает возможности выявления причинно-следственных связей исходных факторов и их влияние на итоговые результаты решаемых задач [7–10].
При этом известные аппроксимации указанных интегралов [11] не охватывают всю область их определения и представлены достаточно громоздкими приближенными формулами с большим числом интервалов их разбиения и т.д.
Другим направлением исследований является получение на основе результатов теоретических исследований упрощенных аналитических зависимостей для решения прикладных инженерных задач. В частности, в работах [12, 13] выполнены такие исследования для представления в элементарных функциях параметров прогиба стержня при изгибе от воздействия продольной нагрузки.
Аналогичные упрощенные зависимости для определения прогиба консоли от действия поперечной силы на свободном конце получены на основе “модифицированного линейного решения” [14, 15] (с численным решением алгебраических уравнений), а также путем разложения эллиптических интегралов в ряды [16] (с результатами близкими к точным). Вместе с тем, следует указать на недостаточность таковых исследований для оценки “укорочения” консоли при прогибе, то есть по определению абсциссы ее конца, что имеет важное значение при проектировании гибких стержневых систем.
Ниже приводятся расчетные зависимости для аналитического представления эллиптических интегралов 1 и 2 рода: $K$, $F\left( {{\varphi }} \right)$, $E\left( {{\varphi }} \right)$, $E\left[ {am\left( u \right)} \right]$ и эллиптических функций Якоби: ${\text{sn}}(u)$, ${\text{cn}}(u)$ в элементарных функциях, полученные на основе результатов гидромеханических решений (с погрешностью ≪1–2%) для заданных значений модуля $\frac{{\sqrt 2 }}{2} \leqslant {{\lambda }} < 1$.
При этом неполный эллиптический интеграл 1 рода $F\left( {{\varphi }} \right)$ для рассматриваемых случаев $\frac{{\sqrt 2 }}{2} \leqslant {{\lambda }} < 1$ рекомендуется определять по новой расчетной зависимости (3.1), основанной на результатах ранее полученных гидромеханических решений [7, 8, 17],
(3.1)
$F\left( {{\varphi }} \right) = - K + \frac{{K{\kern 1pt} _{{}}^{'}}}{{{\pi }}}{\text{Arch}}\left( {r\frac{{{{{{\varepsilon }}}_{1}} + \sqrt {{{\varepsilon }}_{1}^{2} - {{\varepsilon }}_{2}^{2}} }}{{{{{{\varepsilon }}}_{2}}}}} \right)$(3.2)
$K = \frac{{{\pi }}}{2} + \frac{{\ln \sqrt {1 - {{{{\lambda }}}^{2}}} }}{{\ln [0.35(1 - 0.2\sqrt {1 - {{{{\lambda }}}^{2}}} )]}}$(3.3)
$K_{{}}^{'} = \frac{{{\pi }}}{2} + \frac{{\ln {{\lambda }}}}{{\ln \left[ {0.35\left( {1 - 0.2{{\lambda }}} \right)} \right]}}.$При этом получена новая аналитическая зависимость (3.4) в элементарных функциях для прямого определения значений эллиптического синуса Якоби ${\text{sn}}(u)$ (основанная на работах [7, 8, 17]), в виде:
(3.4)
${\text{sn}}(u) = \frac{{({{\xi }}_{{}}^{*} - n)\left( {1 - m} \right)}}{{{{\xi }}_{{}}^{*}\left( {1 + m - 2n} \right) + n\left( {1 + m} \right) - 2m}},\quad {{\xi }}_{{}}^{*} = \frac{2}{r}\frac{{{\text{ch}}\left[ {\frac{{{\pi }}}{{K_{{}}^{'}}}\left( {u + K} \right)} \right]}}{{1 + {{r}^{{ - 2}}}{\text{c}}{{{\text{h}}}^{2}}\left[ {\frac{{{\pi }}}{{K_{{}}^{'}}}\left( {u + K} \right)} \right]}}$Величина эллиптического косинуса Якоби ${\text{cn}}(u)$ определяется по формуле [6]
Значения же неполного эллиптического интеграла 2 рода $E\left( {{\varphi }} \right)$ находятся для двух интервалов в зависимости от заданных величин модулярного угла ${{{{\alpha }}}_{0}} = \frac{{{\alpha }}}{{{\pi }}} \cdot 180^\circ $ и амплитуды ${{\varphi }} = \arcsin \left( {\frac{{\sqrt 2 }}{{2{{\lambda }}}}} \right)$ по следующим усовершенствованным формулам [10]:
(3.6)
$E\left( {{\varphi }} \right) = {{\varphi }} - \left( {{{\varphi }} - \sin {{\varphi }}} \right)\frac{{{{{{\alpha }}}_{0}}}}{{90^\circ }},\quad 0 \leqslant {{\varphi }} \leqslant 1$Значения $E\left( {{\varphi }} \right)$, полученные по зависимостям (3.6), близко (~1%) согласуются с графиками точного решения [5], а для частных случаев (граничных участков) значения $E\left( {{\varphi }} \right)$ полностью совпадают с точными формулами, в частности, при ${{{{\alpha }}}_{0}} = 0;$ $\frac{{{\pi }}}{2}$ и ${{\varphi }} = 0;$ $\frac{{{\pi }}}{2}$, соответственно, $E\left( {{{\varphi }},0} \right) = {{\varphi }}$; $E\left( {{{\varphi }},1} \right) = \sin {{\varphi }}$ и $E\left( {0,{{\lambda }}} \right) = 0$; $E\left( {\frac{{{\pi }}}{2},{{\lambda }}} \right) = E$.
Величина интеграла $E\left[ {am\left( u \right)} \right]$ в зависимости (2.5) также находится по формулам (3.6), принимая в них вместо ${{\varphi }}$ величину эллиптической амплитуды am(u) = $\arcsin [{\text{sn}}(u)]$, в котором значение эллиптического синуса Якоби ${\text{sn}}(u)$ рассчитывается по (3.4).
Таким образом, подставляя рекомендуемые расчетные зависимости, выраженные в элементарных функциях (3.1)–(3.7), в формулы (2.5), строятся очертания линии изогнутой консоли для заданных значений модуля ${{\lambda }}$.
Кроме этого, по подсчитанным по формуле (2.6) значениям угла $u$, определяются также по нижеследующим зависимостям [1] значения изгибающих моментов
и углов ${{\theta }}$ между касательной к текущей точке консоли и осью $0x$(3.8)
${{\theta }} = 2\arcsin \left[ {{{\lambda }} \cdot {\text{sn}}\left( u \right)} \right] - \frac{{{\pi }}}{2}$Кривизна изгиба консоли k вдоль длины стержня определится производной
в которой ${\text{dn}}\left( u \right) = \sqrt {1 - {{{{\lambda }}}^{2}}{\text{s}}{{{\text{n}}}^{2}}\left( u \right)} $ – дельта амплитуды Якоби (рис. 2).
Рис. 2.
Графики параметров изгибаемой консоли: кривые 1, 2 и 7, 8 – очертания консоли $y = f\left( {x,{{\lambda }}} \right)$ для заданных значений ${{{{\beta }}}^{2}} = 0.7305,3.4055$ для нелинейной и линейной задач; кривые 3, 4 и 5, 6 – значения изгибаемых углов ${{{{\theta }}}_{0}} = f\left( {t,{{\lambda }}} \right)$ и кривизны консоли ${{\theta }}_{0}^{'} = f\left( {t,{{\lambda }}} \right)$ для тех же значений ${{{{\beta }}}^{2}}$; кривая 9 – эпюра внутренней энергии изгиба $V = f\left( {{{{{\alpha }}}_{0}}} \right)$.

Внутренняя энергия изгиба консоли $V$ находится по формуле [1]
(3.10)
$V = PL\left\{ {\frac{2}{{{\beta }}}\left[ {E - E\left( {{\varphi }} \right)} \right] - 2(1 - {{{{\lambda }}}^{2}})} \right\}$Для расчетов прикладных задач (с погрешностью <1.5–2.5%) аналитическую взаимосвязь между значениями ${{\beta }}$ и ${{\lambda }}$ в формуле (2.4), можно выразить через значения модулярного угла ${{{{\alpha }}}_{0}}$ в виде зависимостей (3.11) и (3.12), полученных на основе [9]:
(3.11)
$\begin{gathered} {{\beta }} = K - {{\left[ {\frac{1}{{{\varphi }}}\left( {1 - \frac{{{{{{\alpha }}}_{0}}}}{{60^\circ }}} \right) + \frac{1}{{1.65 \cdot {{\varphi }} - 0.5}} \cdot \frac{{{{{{\alpha }}}_{0}}}}{{60^\circ }} + 1.15\left( {{{\varphi }} - 0.65} \right)\left( {{{K}^{{ - 1}}} + 0.165\frac{{{{{{\alpha }}}_{0}}}}{{60^\circ }} - \frac{2}{{{\pi }}}} \right)} \right]}^{{ - 1}}} \\ \;45^\circ < {{{{\alpha }}}_{0}} < 60^\circ \\ \end{gathered} $(3.12)
${{\beta }} = K - {{\left[ {\frac{{3 - \frac{{{{{{\alpha }}}_{0}}}}{{30^\circ }}}}{{1.665 \cdot {{\varphi }} - 0.5}} + \frac{{\frac{{{{{{\alpha }}}_{0}}}}{{30^\circ }} - 2}}{{\ln \left[ {{\text{tg}}\left( {\frac{{{\pi }}}{4} + \frac{{{\varphi }}}{2}} \right)} \right]}}} \right]}^{{ - 1}}},\quad 60^\circ \leqslant {{{{\alpha }}}_{0}} < 90^\circ $4. Анализ результатов и примеры. На рис. 1 приведена расчетная схема изгиба горизонтальной консоли от действия поперечной вертикальной силы $P$, на которой для заданных значений модуля λ, равных $\sqrt {0.6} $, $\sqrt {0.85} $, $\sqrt {0.99999} $, показаны:
– линии изгибов консоли (кривые 1–3), практически совпадающих с очертаниями кривых, построенных численным методом [2, рис. 2, с. 128];
– эпюры изгибающих моментов сил по длине консоли с учетом нелинейности (кривые 4–6) и для случая линейной задачи (кривые 7, 8).
Из рис. 1 также следует, что при силовых нагрузках с модулем ${{\lambda }} > \sqrt {0.85} $ завышение “линейных” моментов сил над “нелинейными” составляет от 20% до кратных значений.
В табл. 1 дается сравнение значений координат (при $L = 1$) изогнутой консоли, подсчитанных по рекомендуемым зависимостям (2.5), (2.6), (3.1)–(3.7) с данными численного (точного) решения Попова Е.П. [1, табл. 9.4 и 9.5 , с. 231] для силовых нагрузок ${{{{\beta }}}^{2}} = 0.7305,3.4055$ при соответствующих значениях модуля ${{\lambda }} = 0.8192,0.9659$.
Таблица 1.
Координаты изогнутой консоли при модулях ${{\lambda }} = 0.8192,0.9659$
| Приведенная длина стержня t | Координата $x$ | % (абс.) | Координата $y$ | % (абс.) | ||
|---|---|---|---|---|---|---|
| точные значения [1] | по автору (2.5), (2.6), (3.1)–(3.7) | точные значения [1] | по автору (2.5), (2.6), (3.1)–(3.7) | |||
| При ${{{{\beta }}}^{2}} = 0.7305$, модуле ${{\lambda }} = 0.8192$ (${{{{\alpha }}}_{0}} = 55^\circ $) | ||||||
| 0 | 0 | 0 | – | 0 | 0 | – |
| 0.2500 | 0.2489 | 0.2474 | –0.2 | 0.0201 | 0.0365 | +1.6 |
| 0.4375 | 0.4327 | 0.4300 | –0.3 | 0.0572 | 0.0746 | +1.7 |
| 0.6250 | 0.6132 | 0.6091 | –0.4 | 0.1076 | 0.1196 | +1.2 |
| 0.8125 | 0.7912 | 0.7855 | –0.6 | 0.1667 | 0.1692 | +0.2 |
| 0.9062 | 0.8795 | 0.8731 | –0.6 | 0.1981 | 0.1950 | –0.3 |
| 1.0 | 0.9676 | 0.9605 | –0.7 | 0.2301 | 0.2212 | –0.9 |
| При ${{{{\beta }}}^{2}} = 3.4055$, модуле ${{\lambda }} = 0.9659$ (${{{{\alpha }}}_{0}} = 75^\circ $) | ||||||
| 0 | 0 | 0 | – | 0 | 0 | – |
| 0.2500 | 0.2384 | 0.2372 | –0.1 | 0.0656 | 0.0572 | –0.8 |
| 0.4375 | 0.3886 | 0.3857 | –0.3 | 0.1769 | 0.1643 | –1.3 |
| 0.6250 | 0.5127 | 0.5075 | –0.5 | 0.3172 | 0.3031 | –1.4 |
| 0.8125 | 0.6178 | 0.6101 | –0.8 | 0.4724 | 0.4602 | –1.2 |
| 0.9062 | 0.6661 | 0.6572 | –0.9 | 0.5527 | 0.5430 | –1.0 |
| 1.0 | 0.7132 | 0.7030 | –1.0 | 0.6338 | 0.6283 | –0.6 |
Как следует из табл. 1, результаты подсчетов координат изогнутой консоли для модулей ${{\lambda }} = 0.8192,0.9659$, подсчитанные по предлагаемым зависимостям на основе элементарных функций (2.5), (2.6), (3.1)–(3.7), весьма близко (<1.0–1.7%) согласуются с данными численного (точного) решения [1] по всей длине консоли (рис. 2, кривые 1 и 2).
На рис. 2 для указанных модулей ${{\lambda }} = 0.8192,0.9659$ показаны также графики углов изгиба ${{{{\theta }}}_{0}}$ (в градусах), равные ${{{{\theta }}}_{0}} = \frac{{{\theta }}}{{{\pi }}}180^\circ $ – (кривые 3, 4) и кривизны консоли, определяемые производной  (кривые 5, 6).
(кривые 5, 6).
Для сравнительной оценки результатов полученного решения нелинейной задачи представлены также очертания изгибов консолей при решении линейной задачи (кривые 7, 8). Как видно из последнего, “линейное” очертание кривой 7 для модуля ${{\lambda }} = 0.8192$ достаточно близко совпадает с точной кривой (без учета горизонтального смещения на ~3%), однако же, для повышенных значений модуля ${{\lambda }} = 0.9659$ линейная задача с очертанием кривой 8 дает неприемлемые результаты с завышением прогибов консоли до 50–80%, не учитывая при этом и горизонтальное смещение на ~30%.
Из рассмотренного общего решения задачи следуют отдельные результаты, в частности, по определению координат свободного конца консоли. Последние выразятся из (2.5), (2.6), (3.4) и (3.5) при значении $t = 1$ в виде:
(4.1)
$x = \frac{2}{{{\beta }}}\sqrt {{{{{\lambda }}}^{2}} - 0.5} ,\quad y = 1 - \frac{2}{{{\beta }}}\left[ {E - E\left( {{\varphi }} \right)} \right]$Для нахождения значений указанных координат в зависимости от действующей силовой нагрузки ${{\beta }}$ предлагаются также следующие упрощенные зависимости для соответствующих интервалов нагрузки:
– для абсциссы $x = f\left( {{\beta }} \right)$
(4.2)
${{x}_{1}} = 1 - 0.09{{\beta }}\left[ {{{\beta }}\left( {{{\beta }} - 0.35} \right) + 0.035} \right],\quad 0 < {{\beta }} \leqslant 1$(4.3)
${{x}_{2}} = 0.96 - 0.32\left( {{{\beta }} - 1} \right)\left[ {1 - 0.12\left( {{{\beta }} - 1} \right)} \right],\quad 1 < {{\beta }} \leqslant 4.85$– для ординаты $y = f\left( {{\beta }} \right)$
(4.4)
${{y}_{1}} = 0.272{{\beta }}\left[ {0.135 + {{\beta }}\left( {1 - 0.032{{\beta }}} \right)} \right],\quad 0 < {{\beta }} \leqslant 1$(4.5)
${{y}_{2}} = 0.3 + 0.55\left( {{{\beta }} - 1} \right)\left\{ {1 - 0.385\left( {{{\beta }} - 1} \right)\left[ {1 - 0.145\left( {{{\beta }} - 1} \right)} \right]} \right\},\quad 1 < {{\beta }} \leqslant 3$(4.6)
${{y}_{3}} = 0.8 + 0.022{{\pi }}({{\beta }} - 3)\left\{ {1 - 0.268\left( {{{\beta }} - 3} \right)\left[ {1 - 0.124\left( {{{\beta }} - 3} \right)} \right]} \right\},\quad 3 < {{\beta }} \leqslant 6.26$В нижеследующей табл. 2 дается сравнение значений координат $x = f\left( {{\beta }} \right)$ и $y\, = \,f{\text{(}}\beta {\text{)}}$ для свободного конца изогнутой консоли, подсчитанных по рекомендуемым зависимостям (4.2)–(4.6) с точными данными (в том числе, заимствованными из [1, 16]) для интервала силовых нагрузок $0 < {{\beta }} \leqslant 4.85$.
Таблица 2.
Координаты свободного конца изогнутой консоли при нагрузках $1 < {{\beta }} \leqslant 4.85$
| Формулы автора | Модулярный угол ${{{{\alpha }}}_{0}}$ (град) | Модуль ${{\lambda }}$ | Силовая нагрузка ${{\beta }}$ | Координаты свободного конца консоли при $t = 1$ | |||||
|---|---|---|---|---|---|---|---|---|---|
| ордината y | абсцисса x | ||||||||
| точные значения | по автору | точные значения | по автору | ||||||
| $y\, = \,f{\text{(}}\beta {\text{)}}$ | % | $x\, = \,f{\text{(}}\beta {\text{)}}$ | % | ||||||
| (4.2), (4.4) | 45.2 | 0.7096 | 0.1182 | 0.0046 | 0.0081 | 0.9999 | 0.9999 | – | |
| 46 | 0.7193 | 0.2643 | 0.0233 | 0.0285 | 0.9997 | 0.9997 | – | ||
| 48.515 [16] | 0.7491 | 0.4967 | 0.0834 | 0.0843 | +1.1 | 0.9960 | 0.9952 | –0.1 | |
| 50 | 0.7660 | 0.5941 | 0.1160 | 0.1160 | – | 0.9919 | 0.9904 | –0.2 | |
| 55 [1, с. 231] | 0.8192 | 0.8547 | 0.2301 | 0.2247 | –2.3 | 0.9676 | 0.9641 | –0.4 | |
| (4.3), (4.5) | 60 | 0.8666 | 1.0783 | 0.3405 | 0.3418 | +1.3 | 0.9274 | 0.9204 | –0.8 |
| 65 | 0.9063 | 1.3009 | 0.4455 | 0.4471 | +0.4 | 0.8716 | 0.8672 | –0.5 | |
| 66.252 [16] | 0.9153 | 1.3593 | 0.4707 | 0.4717 | +0.2 | 0.8552 | 0.8500 | –0.6 | |
| 70 | 0.9397 | 1.5467 | 0.5436 | 0.5424 | -0.2 | 0.8003 | 0.7965 | –0.5 | |
| 72.866 [16] | 0.9556 | 1.7088 | 0.5977 | 0.5944 | -0.3 | 0.7224 | 0.7525 | +1.6 | |
| 75 [1, с. 231] | 0.9659 | 1.8454 | 0.6338 | 0.6322 | -0.3 | 0.7132 | 0.7469 | +0.5 | |
| 80 | 0.9848 | 2.2541 | 0.7167 | 0.7273 | +1.5 | 0.6082 | 0.6191 | +1.8 | |
| (4.3), (4.6) | 85.89 [16] | 0.9974 | 3.1415 | 0.8101 | 0.8094 | –0.1 | 0.4478 | 0.4508 | +0.7 |
| 88 | 0.9994 | 3.8606 | 0.8472 | 0.8471 | – | 0.3659 | 0.3588 | –1.9 | |
| 89.257 | 0.9999 | 4.8503 | 0.8791 | 0.8788 | – | 0.2915 | 0.2972 | +1.9 | |
Как следует из табл. 2, значения координат $x = f\left( {{\beta }} \right)$ и $y = f\left( {{\beta }} \right)$ для свободного конца изогнутой консоли, подсчитанных по рекомендуемым зависимостям (4.2)–(4.6) весьма близко (~1–2%) согласуются с точными данными, в том числе, заимствованными из [1, 16], для всего интервала действия силовых нагрузок $0 < {{\beta }} \leqslant 4.85$.
Кроме этого, на рис. 2 представлено изменение характера внутренней энергии изгиба $V = f\left( {{{{{\alpha }}}_{0}}} \right)$ в зависимости от модулярного угла ${{{{\alpha }}}_{0}}$ (кривая 9), из которого следует, что консоль обладает наибольшей внутренней энергией при значениях ${{{{\alpha }}}_{0}} = 75^\circ ...80^\circ $, соответствующих силовому коэффициенту подобия ${{\beta }} = 1.845...2.284$.
Заключение. В работе рассматривается классическая нелинейная задача изгиба консоли от действия вертикальной силы. При этом получены расчетные зависимости в элементарных функциях для прямого аналитического определения основных параметров изгибаемой консоли, таких как – координаты очертания консоли, изгибаемые углы и кривизна по длине консоли, моменты сил и внутренняя энергия изгиба, а также упрощенные формулы для нахождения координат свободного конца консоли. Сравнение полученных расчетных значений с графическими и табличными данными известных численных (точных) решений дало достаточно высокую сходимость результатов (<1–2%), приведены примеры расчета, в том числе со сравнением с результатами линейного расчета. Полученные результаты могут быть использованы, в частности, при определении (обратным методом) жесткости стержней консолей произвольного поперечного сечения, а также модуля упругости материала консоли при известных сечениях, в том числе при конструировании защитных сооружений от опасных склоновых геофизических процессов и др.
Список литературы
Попов Е.П. Теория и расчет гибких упругих стержней. М.: Наука, 1986. 294 с.
Захаров Ю.В., Охоткин К.Г. Нелинейный изгиб тонких упругих стержней // ПМТФ. 2002. Т. 43. № 5. С. 124–131.
Захаров Ю.В., Захаренко А.А. Динамическая потеря устойчивости в нелинейной задаче о консоли // Вычислительные технологии. 1999. Т. 4. № 1. С. 48–54.
Анахаев К.Н. К расчету математического маятника // Доклады академии наук. 2014. Т. 459. № 3. С. 288–293. https://doi.org/10.7868/S0869565214330081
Милн-Томсон Л. Эллиптические интегралы // Справочник по специальным функциям / Под редакцией М. Абрамовица, И. Стиган М.: Наука, 1979. С. 401–441.
Милн-Томсон Л. Эллиптические функции Якоби и тэта-функции // Справочник по специальным функциям / Под редакцией М. Абрамовица, И. Стиган М.: Наука, 1979. С. 380–400.
Анахаев К.Н. О совершенствовании гидромеханических методов расчета потенциальных (фильтрационных) потоков // “Инженерные системы – 2009”. Труды межд. научн.-практ. конф. Т. 2. М.: РУДН, 2009. С. 588–595.
Анахаев К.Н. Об определении эллиптических функций Якоби // Вестник РУДН. Сер.: Мат. Информат. Физ. 2009. № 2. С. 90–95.
Анахаев К.Н. О полных эллиптических интегралах 3-го рода в задачах механики // Доклады академии наук. 2017. Т. 473. № 2. С. 151–153. https://doi.org/10.7868/S0869565217080072
Анахаев К.Н. Эллиптические интегралы в нелинейных задачах механики // Доклады РАН. Физика. Техн. науки. 2020. Т. 491. № 1. С. 24–29. https://doi.org/10.31857/S2686740020020042
Пархомовский Я.М. Приближенные формулы для эллиптических интегралов и примеры приложения их к двум задачам нелинейной статики упругих балок // Уч. записки ЦАГИ. 1978. Т. 9. № 4. С. 75–86.
Астапов Н.С. Приближенные формулы для прогибов сжатых гибких стержней // ПМТФ. 1996. Т. 37. № 4. С. 135–138.
Анфилофьев А.В. Стрела прогиба и сближение концов стержня в продольном изгибе // ПМТФ. 2001. Т. 42. № 2. С. 1–6.
Зуев Д.М. Стрела прогиба консоли под действием поперечной сосредоточенной нагрузки. Приближенные формулы для модификации линейной теории // Актуальные проблемы авиации и космонавтики. 2018. Т. 1. С. 294–296.
Зуев Д.М., Охоткин К.Г. Модифицированные выражения для стрелы прогиба консоли в случае поперечной нагрузки // Космические аппараты и технологии. 2020. Т. 4. № 1 (31). С. 28–35.
Захаров Ю.В., Охоткин К.Г., Власов А.Ю. Приближенные формулы для стрелы прогиба упругого стержня при поперечном нагружении // ПМТФ. 2002. Т. 43, № 5. С. 132–134.
Анахаев К.Н. О расчете потенциальных потоков// ДАН 2005. Т. 401. № 3. С. 337–341.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Механика твердого тела