

Геомагнетизм и аэрономия, 2022, T. 62, № 6, стр. 769-780
Определение положения Южного магнитного полюса по данным российских кругосветных экспедиций: 1820 г. (Беллинсгаузен), 2020 г. (“Адмирал Владимирский”) Часть 1. Экспедиция Беллинсгаузена
С. А. Меркурьев 1, 2, *, В. Г. Боярских 1, И. М. Демина 1, С. А. Иванов 1, В. А. Солдатов 1
1 Санкт-Петербургский филиал Института земного магнетизма, ионосферы
и распространения радиоволн РАН (СПбФ ИЗМИРАН)
Санкт-Петербург, Россия
2 Санкт-Петербургский государственный университет (СПбГУ)
Санкт-Петербург, Россия
* E-mail: sam_hg@hotmail.com
Поступила в редакцию 11.02.2022
После доработки 23.05.2022
Принята к публикации 25.05.2022
- EDN: SKNUIQ
- DOI: 10.31857/S0016794022060104
Аннотация
В ходе кругосветной экспедиции 2019‒2020 гг. на океанографическом исследовательском судне “Адмирал Владимирский”, повторившей маршрут Беллинсгаузена и Лазарева 1820 г., был получен большой объем магнитных данных, в том числе и в районе Антарктиды. Одной из целей проведенных исследований было определение положения Южного магнитного полюса по экспериментальным данным. Это послужило поводом, чтобы вернуться к данным о склонении, полученным в ходе экспедиции Беллинсгаузена, и определить по этим данным положение Южного магнитного полюса. В первой части представляемой работы предложено и реализовано несколько методов решения этой задачи, которые были предварительно протестированы на модельных примерах. Во второй части положение Южного магнитного полюса определяется по данным компонентных и модульных измерений, полученным на океанографическом исследовательском судне “Адмирал Владимирский”.
1. ВВЕДЕНИЕ
Задача определения местоположения Северного и Южного магнитных полюсов всегда была в центре внимания и путешественников, и магнитологов, и до настоящего времени не потеряла своей значимости и актуальности. Для решения этой сложной в теоретическом, методологическом и организационном плане задачи проводились экспедиционные исследования, велись наблюдения и теоретические изыскания. Их целью была и остается разработка методов и алгоритмов по оценке местоположения магнитных полюсов Земли на основе прямых измерений, построения региональных моделей и использования глобальных моделей магнитного поля Земли (МПЗ).
Важность и актуальность проведения геомагнитных исследований, направленных на определение положения Южного магнитного полюса (ЮМП), определяются тем, что знание современного положения магнитных полюсов и их динамики во времени необходимо для решения целого ряда фундаментальных геофизических задач, приближающего нас к пониманию природы и механизма генерации МПЗ [Merrill et al., 1998], а также того, как и почему происходят его инверсии.
В настоящее время не существует общепринятой гипотезы, отвечающей на вопрос: индикатором каких процессов служат изменения положения и скорости перемещения полюсов [Witze, 2019]. В качестве таковых рассматривались локальные процессы в ядре и связанные с ними джерки [Newitt et. al., 2002; Campbell, 2003] и/или глобальные изменения, ведущие в результате к инверсии поля [Кузнецов, 2006].
Знание фактического положения магнитных полюсов имеет и большое практическое значение, так как может быть использовано для уточнения и проверки точности глобальных моделей геомагнитного поля в полярных регионах, в которых отличия наблюдаемого МПЗ и поля глобальных моделей наиболее значительны. Существенное изменение положения Северного магнитного полюса, в частности, вынуждает обновить так называемую Всемирную модель магнитного поля (World Magnetic Model или WMM), которая, в том числе, лежит в основе всех навигационных систем.
Кроме того, важным вопросом является оценка влияния смещений истинных магнитных полюсов на верхнюю атмосферу [Ляхов и др., 2006], на термосферу и ионосферу Земли [Намгаладзе и др., 2018], на климат [Беликов и др., 2018], на биосферу [Решетняк и Павлов, 2016] и, в конечном счете, на человека [Valet, Valladas, 2010].
1.1. Историческая справка и определения
Магнитный полюс – это блуждающая точка на поверхности Северного (Южного) полушария Земли, где вектор геомагнитного поля T направлен вертикально, т.е. горизонтальная составляющая H равна нулю. Поскольку все линии равного магнитного склонения D сходятся на магнитном полюсе, на самом полюсе склонение не определено. Кроме того, в силу наличия недипольной составляющей геомагнитного поля, эта сходимость не является радиальной даже в полярных областях. То, что компас не указывает на географический север, было замечено еще в 11-ом веке в Китае и в конце 15-го века в Старом Свете. Это послужило толчком к активизации регулярных измерений склонения. Стало очевидным, что наличие достоверных карт значений склонения на акватории является необходимым условием обеспечения судоходства. Измерения D проводились регулярно во время рейсов судов Британского адмиралтейства.
Начало магнитных измерений в полярных областях приходится на 16 век и связано с поисками Северо-восточного прохода в Китай и Индию [Hakluyt, 1589; Де-Фер, 1936]. В девятнадцатом веке было предпринято несколько неудачных попыток достичь ЮМП, среди которых попытки французского исследователя Дюмон-Дюрвиля (1837–1840 гг.), американца Чарльза Уилкса (экспедиция 1838–1842 гг.) и британца Джеймса Кларка Росса (экспедиция 1839–1843 гг.) [Ross, 1847].
Первое вычисление магнитного наклонения для определения местоположения ЮМП было сделано 23 января 1838 г. гидрографом Клементом Адрианом Винсендоном-Дюмулином [Voyage, 1842–1846], членом экспедиции Дюмон-Дюрвиля на корветах “Астролябия” и “Zélée” в 1837–1840 гг. в Антарктике и Океании, в ходе которой была открыта Земля Адели.
В двадцатом веке: 16 января 1909 г. трое участников экспедиции сэра Эрнеста Шеклтона (Дуглас Моусон, Эджуорт Дэвид и Алистер Маккей) декларировали, что по измерениям наклонения нашли ЮМП [Шеклтон, 2014], который согласно исторической модели gufm [Jackson et al., 2000] в то время находился на суше. Координаты магнитных полюсов, вычисленные по этой модели, можно найти, например, на сайте National Geophysical Data Center [NGDC]. Они установили флагшток на месте полюса и объявили эту территорию владениями Британской империи. Чтобы достичь ЮМП, исследователи прошли в общей сложности 1260 миль, волоча за собой сани и припасы, которые весили приблизительно 670 фунтов. Определенное ими положение полюса 16 января 1909 г. составило 72°25′ S, 155°16′ E [Магидович и Магидович, 1985].
Исследование движения магнитных и геомагнитных полюсов и эволюции магнитного поля Земли в обоих полярных регионах за последние тысячелетия представлено в [Korte, Mandea, 2008]. Исторические геомагнитные данные, полученные с 1510 по 1930 год, были собраны в течение двух последних десятилетий 20-го века, их всесторонний обзор дан в [Jonkers et al., 2003]. Динамика движения обоих полюсов в 2015−2019 гг. исследовалась в [Regi et al., 2021] на большом объеме данных, собранных тремя спутниками программы SWARM.
1.2. Геомагнитные исследования Антарктики от Кука до “Адмирала Владимирского”
Первые геомагнитные измерения в Антарктическом регионе были выполнены в ходе второй кругосветной экспедиции Дж. Кука (1772−1775 гг.) [Cook, 1777; The Journals, 1961], см. рис. 1а. Результаты измерений склонения, выполненных астрономом экспедиции W. Beyley, были опубликованы и использованы, в частности, при построении исторической модели геомагнитного поля gufm. Но оценок местоположения ЮМП по полученным данным он, по-видимому, не делал, это выходило за рамки стоявших перед экспедицией задач.
Рис. 1.
Схема распределения пунктов измерения склонения: (а) – в ходе экспедиции Кука, (б) – в ходе экспедиции Беллинсгаузена. Стрелками показаны результаты измерения склонения, звездочкой показано положение ЮМП по модели gufm на эпоху экспедиций.
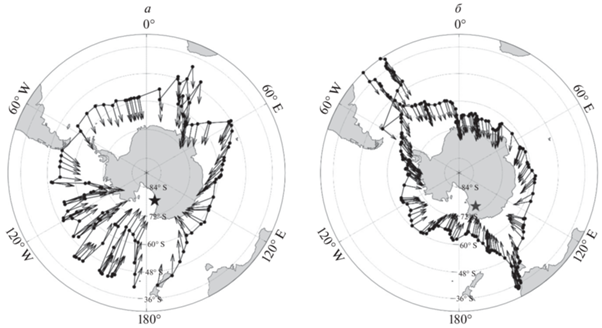
Первое экспериментальное определение местоположения ЮМП было выполнено в ходе кругосветной антарктической экспедиции русских мореплавателей Беллинсгаузена и Лазарева (1819− 1821 гг.). Для решения этой задачи шлюпы “Восток” и “Мирный” обогнули Антарктиду, выполнив 146 измерений магнитного склонения (рис. 1б). Частично, где это было возможно, участники экспедиции повторили маршрут экспедиции Кука. Это позволило в недавней работе [Распопов и др., 2014] оценить вековой ход склонения за прошедшие между экспедициями 48 лет. Результаты выполненных измерений были использованы Беллинсгаузеном для вычисления положения ЮМП. По его расчетам полюс располагался в точке с координатами 76° S и 142°30′ E. Однако неизвестно, какие именно точки с измеренным склонением были использованы Беллинсгаузеном для расчета этих координат. В отчете [Беллинсгаузен, 1949] Беллинсгаузен опубликовал всего 52 точки с измеренными значениями склонения, из которых 46 − в районе Антарктиды. Позднее по просьбе Гаусса он передал ему 203 точки со значениями склонения. Метод, которым Беллинсгаузен определил координаты ЮМП, в его отчетах и переписке с Гауссом не описан. Можно только предположить, что он использовал методику, которая приведена в статье [Duperrey, 1841], как один из возможных подходов к определению положения полюса. Согласно этой методике, на карту в полярной проекции наносятся прямые в направлении измеренного склонения, пересечение этих прямых должно дать положение полюса.
Программа юбилейной кругосветной экспедиции “Адмирала Владимирского” (2019–2020 гг.) была составлена так, что ее ход должен был в основном повторять кругосветную экспедицию Беллинсгаузена. Наряду с попутными геофизическими и океанографическими исследованиями были запланированы специальные работы по проведению магнитных измерений с целью экспериментального определения координат ЮМП. В рамках данной работы нами были получены оценки местоположения ЮМП по магнитным измерениям, выполненным в ходе экспедиций Кука и Беллинсгаузена (ЧАСТЬ 1) и “Адмирала Владимирского” (ЧАСТЬ 2).
2. ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЮМП ПО ДАННЫМ ЭКСПЕДИЦИЙ КУКА И БЕЛЛИНСГАУЗЕНА
2.1. Методы определения положения магнитного полюса
Местоположение магнитного полюса может быть определено тремя способами: путем прямых измерений наклонения (экспериментальный), путем обработки данных магнитной съемки в приполярных областях (алгоритмический) или путем определения полюса по глобальным моделям геомагнитного поля (аналитический) [Newitt et al., 2009]. Экспериментальное определение положения магнитного полюса подразумевает проведение магнитной съемки непосредственно в районе полюса. Заметим, что независимо от метода, задача нахождения магнитного полюса с помощью приборов является сложной по нескольким причинам: во-первых, в силу погрешности измерений область, где горизонтальная составляющая очень мала (то есть, наклонение близко к максимальному значению 90°) довольно обширна; во-вторых, положение магнитного полюса не является фиксированной точкой, полюса могут смещаться в течение суток на расстояния от первых десятков до сотни километров от своего среднего положения в зависимости от геомагнитных возмущений в ионосфере и магнитосфере [Wasserfall, 1938; Dawson and Newitt, 1982] и, наконец, полярные области относительно недоступны для проведения экспедиционных работ.
Тем не менее, имея набор точек с измеренными значениями какой-либо или нескольких компонент геомагнитного поля, положение полюса по этим данным можно рассчитать. Для решения этой задачи предложено несколько подходов, которые применяются для тех или иных типов данных. Наиболее известными из методов являются локальный сферический гармонический анализ, метод виртуального магнитного полюса, метод полиномов и др. [Newitt et al., 2009]. Возможности каждого из этих подходов ограничены возникающими краевыми эффектами, поэтому важно, чтобы искомый полюс находился внутри области, образованной точками измерений.
Аналитический способ определения положения полюсов основан на использовании глобальных моделей, представляющих геомагнитное поле в виде разложения в ряд по сферическим гармоническим функциям. В отличие от локальной модели коэффициенты глобальных моделей могут быть использованы для вычисления значений всех компонент поля в любой точке на поверхности Земли, в частности, в районе полюса. Результаты вычислений зависят от выбранной модели – так например, модель может учитывать или не учитывать аномальное магнитное поле. В первом варианте результат должен быть ближе к результату, полученному экспериментальными методами. На практике геомагнитное поле является почти вертикальным на области овальной формы, причем размеры и положение этой области могут меняться ежедневно [Dawson and Newitt, 1982].
2.2. Использованные данные
В качестве исходных данных для определения положения ЮМП нами были использованы результаты измерения склонения, выполненные в ходе второй кругосветной экспедиции Кука (1772− 1775 гг.) и в ходе кругосветной антарктической экспедиции русских мореплавателей Беллинсгаузена и Лазарева (1819−1821 гг.). Перед экспедицией Кука не стояла задача определения положения ЮМП. Ее целью было установление факта наличия материка в Южном океане. В нашей работе мы использовали только те данные Кука, широта места которых выше 45° S.
Проф. И.М. Симоновым, астрономом экспедиции Беллинсгаузена, в ходе экспедиции были выполнены измерения склонения D в 203 точках. Именно в таком количестве они были переданы Гауссу, который использовал эти значения D для проверки предложенного им представления геомагнитного поля в виде разложения по сферическим функциям и опубликовал эти данные [Гаусс, 1952]. Мы из них использовали 146 точек, имеющих широту выше 45° S, как и в случае обработки данных Кука. На рисунке 1б показано географическое положение этих точек. Определения местоположения ЮМП проводилось несколькими методами, включая аналитический, который использует историческую модель gufm. Применимость всех методов тестировалась на моделях: в точках с географическими координатами реальных измерений D вычислялись значения склонения по модели gufm на момент проведения измерений. По модельным значениям склонения каждым методом определялось положение полюса. После этого координаты полученных полюсов сравнивались с координатами ЮМП, вычисленными по модели gufm. Фактически, для модельных значений склонения разница координат определяла ошибку конкретного метода. Снизить эту ошибку, обладая лишь измерениями склонения, довольно трудно, поскольку все методы в той или иной степени используют дипольное приближение.
2.3. Метод двух кругов
Первый метод, который мы использовали для определения координат магнитного полюса по данным о склонении, полученным в экспедициях Кука и Беллингсгаузена, мы условно назвали “метод двух кругов”, т.к. в литературе нам не встретилось описание такого метода решения поставленной задачи. Мы, естественно, не претендуем на авторство этого метода, поскольку его интуитивная идея вытекает из свойства склонения. Действительно, все изогоны сходятся в точке расположения магнитного полюса, поэтому линии больших кругов, построенные в направлении, заданном склонением в дипольном приближении, если они не лежат на одной изогоне, пересекаются в точке магнитного полюса.
Таким образом, метод двух кругов состоит в следующем: через точку с известным склонением проводится большой круг, проходящий по заданному азимуту (склонению в этой точке). То же делается для второй точки со своим азимутом (склонением). Эти два круга пересекаются в двух точках, и южная точка пересечения дает оценку положения ЮМП. Для случая чисто дипольного поля эта оценка будет точна, поскольку каждый большой круг проходит через полюс диполя. Назовем полученную этим методом точку виртуальным магнитным полюсом (ВМП) по аналогии с работой [Кузнецов, 1998], в отличие от принятого в палеомагнитологии понятия о виртуальном геомагнитном полюсе.
Ошибка этого метода складывается из двух составляющих: случайной погрешности измерений (инструментальная ошибка) и систематической ошибки, порожденной недипольной составляющей поля. Первая ошибка проиллюстрирована на рис. 2: видно, что при близком расположении точек малые изменения склонения приводят к значительным смещениям точки пересечения.
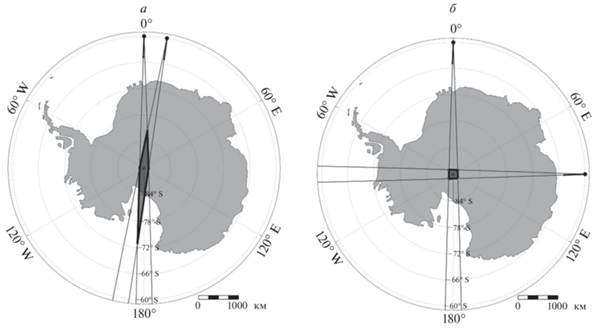
Рис. 2.
Зависимость ошибки определения положения ЮМП от углового расстояния между точками измерения: (а) – угловое расстояние 10°, (б) – угловое расстояние 90°. Случайные ошибки определения D взяты равными ±2°.
Если применить метод к чисто дипольной модели, то можно показать, что при расстоянии между соседними точками, равном 250 км (пять градусов долготы при широте около 60° S), и погрешностях измерений склонения в 2° погрешность определения положения ВМП составляет почти 2000 км. Для поиска оптимального расстояния между точками, которое следует выбирать при определении ВМП данным методом, нами были проведены расчеты для двух вариантов, как если бы измерения выполнялись в поле осевого геоцентрического диполя и в поле модели gufm. В качестве точек измерения склонения были использованы координаты пунктов измерения экспедиции Беллинсгаузена, а значения склонений вычислялись в соответствии с рассматриваемым полем. К склонению добавлялось небольшое возмущение и данным методом получались в зависимости от вида поля две оценки положения полюса. В первом случае, погрешность – это расстояние от полученной оценки до географического полюса, а во втором – до полюса модели gufm. Учитывая, что маршрут движения судна вокруг Антарктиды можно рассматривать в первом приближении как субдолготный, определялось оптимальное долготное расстояние между точками, образующими пару. Для первой модели было получено, что оптимальное долготное расстоянием между точками в паре составляет 90°. Для второй – это долготное расстояние составляет 65°.
На рисунке 3 показана систематическая ошибка метода. Проведены два больших круга через две точки по азимутам, построенным согласно модели gufm на эпоху 1820. Точки взяты из данных экспедиции Беллинсгаузена и их долготы различаются примерно на 90°. Несовпадение ВМП и построенного по модели полюса объясняется наличием в модели недипольной части поля.
Рис. 3.
Систематическая ошибка определения положения магнитного полюса методом больших кругов. Черными кружками показаны точки, в которых рассчитывались склонения по модели gufm. Сплошной линией показаны дуги большого круга. Квадратом показан ВМП. Звездочкой показано положение ЮМП на эпоху 1820 г. по модели gufm.

Для получения оценки положения ЮМП по данным экспедиций Кука и Беллинсгаузена для каждой из экспедиций брались пары точек, отстоящие друг от друга на 40°−120°, описанным методом вычислялись ВМП и затем для нахождения положения ЮМП применялся метод бутстреппинга – метод исследования вероятностных распределений, основанный на многократной генерации выборок методом Монте-Карло на базе имеющейся выборки [Efron and Tibshirani, 1986]. Этот метод позволяет довольно точно оценивать среднее и дисперсию для данных с систематическими ошибками. Оценки координат положения ЮМП, полученные данным методом по экспериментальным данным Кука и Беллинсгаузена и соответствующим модельным данным, приведены в табл. 1.
Таблица 1.
Координаты ЮМП, полученные разными методами
| Метод | Беллинсгаузен | Кук | |||
|---|---|---|---|---|---|
| Модельное склонение | широта | долгота) | широта | долгота) | |
| Больших кругов | –74.28 | 149.77 | –75.24 | 162.26 | |
| Эффективный диполь | –72.9 | 157.9 | –78.7 | 150.4 | |
| Аппроксимация | –74.0 | 151.0 | –77.4 | 146 | |
| Итерационный | –72.5 | 154.5 | –74.0 | 151.0 | |
| Cреднее | –73.44 | 153.41 | –77.11 | 155.32 | |
| gufm | –74.39 | 152.93 | –76.71 | 160.17 | |
| Измеренное склонение | Больших кругов | –73.01 | 150.43 | –75.62 | 161.21 |
| Эффективный диполь | 73.2 | 154.8 | –78.7 | 148.4 | |
| Аппроксимация | –73.56 | 151 | –78 | 143.6 | |
| Итерационный | –72.8 | 153.8 | – | – | |
| Среднее | –73.15 | 152.52 | –77.55 | 151.74 | |
| Беллинсгаузен | –76 | 142.5 | – | – | |
2.4. Метод эквивалентного диполя
Этот метод также использует для описания поля в районе ЮМП дипольное приближение. Рассмотрим диполь с магнитным моментом M, расположенный в центре Земли. Поле диполя описывается известной формулой
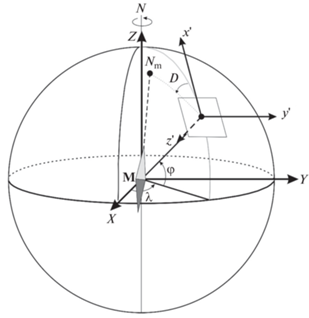
Рис. 4.
Системы координат в методе эквивалентного диполя. XYZ – оси геоцентрической системы координат. x ', y ', z ' – оси топоцентрической системы координат. Ромбом показано местоположение диполя. Nm – точка пересечения оси диполя с поверхностью Земли. φ, λ – географические координаты. D – магнитное склонение.
Горизонтальные компоненты вектора B' связаны через склонение следующим образом: $B_{y}^{'} = {\text{tg}}(D)B_{x}^{'}$. Обозначим через аj строки матрицы A и выразим компоненты B, через аj. Тогда получаем
2.5. Аппроксимация поля суммой сферических гармоник
Для построения сферической гармонической модели по ряду точек с измеренными значениями склонения предложено два метода. Первый из них, так же как описанный выше метод эквивалентного диполя, основан на использовании определения склонения D = arctg(Y/X). В этом случае верно соотношение X sin(D) = Y cos(D). Обзор этого метода можно найти в [Baraclow, 1974]. Компоненты X и Y могут быть представлены в виде разложения в ряд по сферическим функциям.
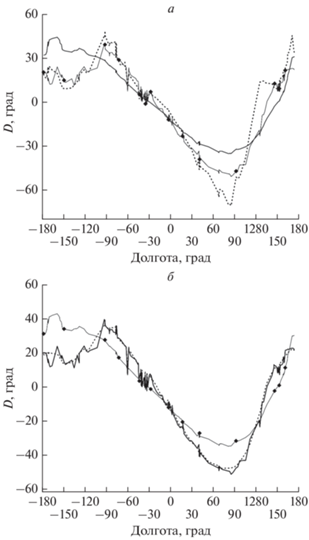
Рис. 5.
Аппроксимации D сферическими функциями: (а) – аппроксимационный метод (п.2.5), (б) – модифицированный метод линеаризации (п.2.6). Черной жирной линией показаны измеренные значения D, черная линия с ромбами – результат аппроксимации при n = 1 (для обоих методов), пунктирная линия – результат аппроксимации при n = 2 для (а) и n = 3 для (б).
2.6. Метод линеаризации
Задача построения сферической гармонической модели геомагнитного поля только по данным склонения D может быть решена методом линеаризации [Baraclow, 1974], которая осуществляется дифференцированием выражения для D.
Рассмотрим выражение для малых приращений склонения
Полученное выражение линейно относительно приращений. Рассмотрим следующий итерационный алгоритм.
Зададим некоторые первоначальные значения X0 и Y0, вычислим H0 и D0, сравним с измеренными значениями D. Линеаризованная формула позволяет вычислить δD. Представим δX и δY в виде сумм сферических функций с коэффициентами $\delta g_{n}^{m}~$ и $\delta h_{n}^{m}$ и подставим их в выражение для $\delta D$. Мы получаем систему линейных уравнений относительно $\delta g_{n}^{m}~$ и $\delta h_{n}^{m}$, по которым вычисляются поправки δX, δY, к X0, Y0 и затем по ним X1 = = X1 + δX, и Y1 = Y1 + δY, H1, D1 и новое δD. Таким образом, строится итерационный процесс. Особенность этого подхода состоит в том, что обычно требуется построить собственные функции оператора Лапласа для “сферической шапки”, что представляет сложную задачу. Но как раз геометрия точек подсказала вариант модификации этого подхода, который и был применен нами в данной работе. Для построения нулевого приближения мы предположили, что полюс находится в центре круговой области, ограниченной точками измерений. В этом случае можно считать модуль горизонтальной компоненты H во всех точках одинаковым (дипольная модель) и равным H0. Тогда можно вычислить X0 = H0 cos D, Y0 = H0 sin D. Величина H0 для определения положения полюса значения не имеет и может быть принята любой. Выразив X0 и Y0 через коэффициенты $g_{n}^{m}~$ и $h_{n}^{m}$, получаем систему уравнений относительно этих коэффициентов. Решение системы дает нулевое приближение сферических коэффициентов и по ним рассчитываются H1. Заменив в системе уравнений относительно $g_{n}^{m}$ и $h_{n}^{m}$ значения H0 на H1 и используя измеренные значения D, получаем новую систему уравнений, решая которую находим новые оценки $g_{n}^{m}$ и $h_{n}^{m}$. Повторяя вышеописанную процедуру, строим итеративный процесс. На каждом шаге наряду с Hi по полученным коэффициентам вычисляются синтезированные Di, которые можно сравнить с измеренными значениями. Полученная дисперсия разности служит критерием окончания итерационного процесса.
На моделях, построенных по данным Беллинсгаузена, описанный итерационный процесс сходился на 4−5 шаге в зависимости от порядка полиномов. При этом плохая обусловленность матрицы системы линейных уравнений наступала при n = 3. Применение метода к реальным данным показало схожие результаты, но потребовало дополнительной отбраковки отдельных точек. На рисунке 5б представлены результаты аппроксимации данным методом для модельных и измеренных D и порядка полинома n = 2. Поскольку описываемый метод в конечном счете основан на аппроксимации D, то расчет H для площади, так же как и в предыдущем методе, может включать ошибку экстраполяции за пределы “кольца” данных. Полученные при n = 3 оценки координат ЮМП приведены в табл. 1.
Описанный метод не является универсальным. Его применимость сильно зависит от пространственный структуры распределения точек измерений и их близости к полюсу. Так, для данных Кука пространственная структура точек измерений не отвечает основному требованию метода, и нам не удалось добиться сходимости метода уже на модельных данных. По этой причине к данным Кука метод не применялся.
3. ОБСУЖДЕНИЕ ПОЛУЧЕННЫХ РЕЗУЛЬТАТОВ
Для определения положения ЮМП к полученным в ходе экспедиций Кука и Беллинсгаузена измеренным значениям склонения были применены разные методы, которые используют возможности вычислительной техники, разработанный математический аппарат и модели магнитного поля Земли, недоступные во времена этих экспедиций. Полученные четырьмя методами оценки координат ЮМП сведены в табл. 1. Кроме того, в табл. 1 приведены координаты полюса, рассчитанные теми же методами по модельным данным, т.е. по склонениям, взятым из модели gufm для эпох, соответствующих временам экспедиций. Также добавлены координаты полюса, вычисленные Беллинсгаузеном. Как и следовало ожидать, между полученными оценками положения ЮМП имеется значительный разброс как по широте, так и по долготе.
Все оценки ЮМП, полученные как по измеренным, так и по модельным данным, показаны черными и незакрашенными кругами, соответственно, на рис. 6б для данных Кука и рис. 6a для данных Беллинсгаузена в азимутальной проекции, которая принята для изображения полярных областей. Средние значения координат ЮМП как для данных экспедиций, так и для модельных данных показаны на том же рисунке звездочками (черными и не закрашенными, соответственно). Для каждого осредненного полюса были рассчитаны 50-% эллипсы доверия, изображенные на рис. 6 сплошной линией для наблюденных данных и пунктирной для модельных.
Рис. 6.
Оценки положения ЮМП с помощью предложенных методов по модельным данным и по наблюдениям Кука и Беллинсгаузена. Белыми кругами показан результат, полученный по модельным данным, черными кругами показан результат, полученный по наблюденным данным, белая и черная звездочки – соответствующие средние значения координат, черный ромб положения ЮМП на эпохи 1771 и 1820 гг., полученныe с помощью модели gufm. Эллипсы соответствуют 50% доверительному интервалу. Сплошная линия – наблюденные данные, штриховая – модельные.
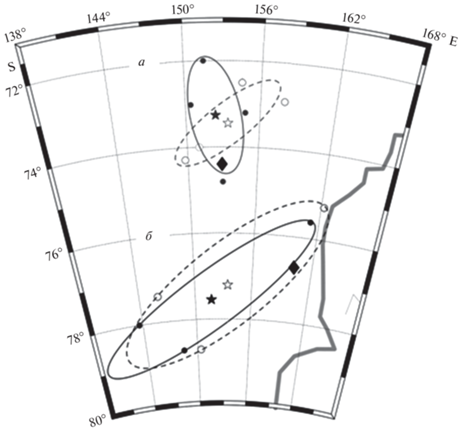
Как видно на рис. 6, размеры эллипса доверия для экспедиции Беллинсгаузена существенно меньше, чем для экспедиции Кука, что, по всей видимости, связано с большей точностью измерений в более поздней экспедиции Беллинсгаузена. Размеры осей эллипсов доверия для модельных и экспериментальных данных по каждой экспедиции примерно одинаковы. Но ориентация оказалась различной. Для данных экспедиции Кука оба эллипса доверия соосны, в то время как главные оси эллипсов, отвечающих экспедиции Беллинсгаузена, составляют значительный угол.
В качестве числовых характеристик разброса ВМП были вычислены расстояния от положения полюса модели gufm до найденных по измеренным и модельным данным разными методами. Результаты приведены в табл. 2 для данных экспедиции Беллинсгаузена и в табл. 3 для данных экспедиции Кука. В таблицу 2 добавлено расстояние до положения полюса, определенного Беллинсгаузеном. Из таблицы 2 видно, что полюс, рассчитанный Беллинсгаузеном, наиболее удален от полюса модели gufm, что может быть связано с ограниченностью имевшихся в распоряжении Беллинсгаузена средств и методов обработки и анализа данных. В то же время можно отметить, что расстояния от полюса модели gufm до полюсов, полученных усреднением ЮМП, рассчитанных по экспериментальным данным Беллинсгаузена и по соответствующим модельным данным, близки (30 км). Имеющееся различие может быть связано с присутствием в экспериментальных данных переменной части геомагнитного поля.
Таблица 2.
Расстояния от положения ЮМП, полученного по данным экспедиции Беллинсгаузена, до полюса, определенного самим Беллинсгаузеном, и до полюса модели gufm
| Расстояние в км до полюса, полученного Беллинсгаузеном | Расстояние в км до полюса, вычисленного по gufm | ||
|---|---|---|---|
| метод определения положения полюса | данные Беллинсгаузена | данные Беллинсгаузена | модельные данные |
| Больших кругов | 406.75 | 172.11 | 95.66 |
| Эффективный диполь | 476.78 | 144.47 | 227.16 |
| Аппроксимация | 367.0 | 109.66 | 72.78 |
| Итерационный | 330.06 | 178.89 | 215.56 |
| Среднее | 432.79 | 138.47 | 106.22 |
| Беллинсгаузен | 0 | 345.54 | – |
Таблица 3.
Расстояния от положения ЮМП, полученного по данным экспедиции Кука, до полюса модели gufm
| Расстояние в км до полюса, вычисленного по gufm | ||
|---|---|---|
| метод определения положения полюса | экспериментальные данные | модельные данные |
| Больших кругов | 124.32 | 172.86 |
| Эффективный диполь | 354.79 | 319.39 |
| Аппроксимация | 426.34 | 360.25 |
| Среднее | 228.27 | 129.73 |
Для данных экспедиции Кука расстояния от средних положений полюсов, полученных по экспериментальным и модельным данным, от вычисленного по gufm, отличается на 100 км, что скорее всего связано с точностью определения склонения и навигационными ошибками в экспедиции Кука. В то же время для обеих экспедиций полученные по модельным данным средние положения ЮМП отличаются от вычисленного по gufm на 106 и 130 км. Поскольку эта величина характеризует погрешность методов, можно сделать вывод, что дипольной модели недостаточно для описания геомагнитного поля в районе ЮМП. В то же время положение ЮМП, вычисленное для эпохи 1820 г. по усеченной модели gufm для n = 1 (дипольное приближение) и n = 2 (квадрупольное приближение), составляют –78.65° S 118.06° E и –75.72° S 145.42° E, соответственно. Из сравнения с табл. 1 хорошо видно, что полученные нами координаты ЮМП значительно ближе к полюсу полной модели gufm, чем к дипольному и квадрупольному приближению, т.е., несмотря на имеющиеся недостатки, примененные нами методы, хоть и не в полной мере, позволили учесть влияние недипольной части. С другой стороны, полученные результаты косвенно подтверждают, что модель gufm применима для описания геомагнитного поля в районе ЮМП на эпоху экспедиций Беллинсгаузена и Кука.
4. ЗАКЛЮЧЕНИЕ
В данной работе получены оценки положения ЮМП в конце 18-го и начале 19-го веков. В качестве экспериментальных данных были использованы результаты измерения склонения, выполненные в районе Антарктиды в ходе экспедиций Кука (1772) и Беллинсгаузена (1820).
Для решения задачи определения координат полюса только по данным склонения было использовано несколько методов, которые предварительно тестировались на моделях. Хотя полученные каждым из этих методов оценки координат ЮМП образуют облако точек, среднее значение отстает от полученного по модели gufm только на 100−130 км. Поскольку все методы основаны на предположении, что вблизи полюса магнитное поле близко к дипольному, приведенная выше величина ошибки характеризует степень влияния недипольной части геомагнитного поля на величину склонения. Существенно большее расстояние до полюса gufm, полученное по измеренным значениям склонения в экспедиции Кука, скорее всего связано с большей погрешностью как собственно измерений склонения, так и определения координат точек, в которых они проводились.
Таким образом, данная работа представляет собой опыт определения координат ЮМП по экспериментальным данным и только по значениям склонения. Основной вывод состоит в том, что на эпохи экспедиций Кука и Беллинсгаузена недипольная часть геомагнитного поля оказывала существенное влияние на положение ЮМП.
Список литературы
‒ Беликов Ю.Е., Буров В.А., Дышлевский С.В., Котонаева Н.Г., Лапшин В.Б., Репин А.Ю. Возможная связь движения магнитного полюса и изменения солнечной активности с климатом Арктики. Часть 3 // Гелиогеофиз. исслед. Вып. 19. С. 25–31. 2018.
‒ Беллинсгаузен Ф.Ф. Двукратные изыскания в Южном Ледовитом океане и плавание вокруг света в продолжение 1819, 1820 и 1821 годов, совершенные на шлюпах “Востоке” и “Мирном” под начальством капитана Беллинсгаузена командира шлюпа “Восток”, шлюпом “Мирным” начальствовал лейтенант Лазарев. Ред. Е.Е. Шведе. М.: Географгис. 359 с. 1949.
‒ Гаусс К.Ф. Избранные труды по земному магнетизму. М.: АН СССР. 331 с. 1952.
‒ Де-Фер Г. Плавания Баренца. 1594–1597 / под редакцией, с введением и примечаниями В.Ю. Визе. Л.: Главсевморпути. 308 с. 1936
‒ Кузнецов В.В. Причина ускорения дрейфа северного магнитного полюса: джерк или инверсия? // Геомагнетизм и аэрономия. Т. 46. № 2. С. 280–288. 2006.
‒ Кузнецов В.В. Прогноз положения южного магнитного полюса на 1999 г. // ДАН. Т. 361. № 2. С. 248–251. 1998.
‒ Ляхов А.Н., Зецер Ю.И., Фуле-Роуэл Т. Возможные последствия смещения магнитных полюсов для структуры и динамики верхней атмосферы Земли // ДАН. Т. 409. № 5. С. 688–690. 2006.
‒ Магидович И.П., Магидович В.И. Очерки по истории географических открытий. Т.4. М.: Просвещение. 335 с. 1985.
‒ Намгаладзе А.А., Шаповалова Ю.А, Князева М.А. Исследование влияния смещения геомагнитных полюсов на термосферу и ионосферу земли: постановка задачи / Тр. Кольского науч. центра РАН. Гелиогеофизика. Т. 5. С. 137–145. 2018.
‒ Распопов О.М., Демина И.М., Мещеряков В.В. Первые геомагнитные измерения в Антарктическом регионе // Геомагнетизм и аэрономия. Т. 54. № 3. С. 420–428. 2014. https://doi.org/10.7868/S0016794014030122
‒ Решетняк М.Ю., Павлов В.Э. Эволюция дипольного геомагнитного поля. Наблюдения и модели. // Геомагнетизм и аэрономия. Т. 56. № 1. С. 117–132. 2016. https://doi.org/10.7868/S0016794015060139
‒ Шеклтон Э. В сердце Антарктики / Пер. П.Ю. Шмидта, А. Бурашко, З. В. Житомирской и В. К. Житомирского, науч. ред. Н. Я. Болотников. М: Paulsen, 528 с. 2014.
‒ Barraclough D.R. Spherical harmonic analyses of the geomagnetic field for eight epochs between 1600 and 1910 // Geophys. J. R. Astr. Soc. V. 36. P. 497– 513. 1974.
‒ Campbell W.H. Comments on “Survey Tracks Current Position of South Magnetic Pole” and “Recent Acceleration of North Magnetic Pole Linked to Magnetic Jerks” // Eos. Trans. AGU. V. 84. № 41. 2003.
‒ Cook J., Furneaux T., Hodges W. A voyage towards the South Pole, and round the world.: performed in His Majesty’s ships the Resolution and Adventure, in the years 1772, 1773, 1774, and 1775. Written by James Cook, Commander of the Resolution. In which is included, Captain Furneaux’s narrative of his proceedings in the Adventure, illustrated with maps and charts by Mr. Hodges. (2 vols.). London. 1777.
‒ Dawson E., Newitt L.R. The magnetic poles of the earth // J. Geomag. Geoelectr. V. 34. P. 225–240. 1982.
‒ Duperrey M.L.I. Notice sur la position des pôles magnétiques de la terre // Bulletin de la Société de Géographie. Deuxième Série. Paris. Chez Arthur-Ber4trand./ Libraire de la Société de Géographie. P. 314–324. 1841.
‒ Efron B., Tibshirani R. Bootstrap method for standard errors, confidence intervals and other measures of statistical accuracy // Stat. Sci. V. 1. № 1. P. 54–77. 1986.
‒ Jackson A., Jonkers A.R.T., Walker M.R. Four centuries of geomagnetic secular variations from historical records // Philosophical Transactions of The Royal Society. A. London. V. 358. P. 957–990. 2000.
‒ Jonkers A.R.T., Jackson A., Murray A. Four centuries of geomagnetic data from historical records // Rev. Geophys. V. 41. № 2. 1006. 2003. https://doi.org/10-10292002000115
‒ The Journals of Captain James Cook / Edited by J.C. Beaglehole The Voyage of the “Resolution and Adventure” 1772–1775. Cambridge. The Hakluyt Society. 1961
‒ Hakluyt G. The Principal Navigations, Voyages and discoveries of the English nations, made by sea or over land, to the most remote and farthest distant quarters of the Earth at any time within the compass of the 1500 years. London. 1589.
‒ Korte M., Mandea M. Magnetic poles and dipole tilt variation over the past decades to millennia // Earth, Planets and Space. V. 60. P. 937–948. 2008. https://doi.org/10.1186/BF03352849
‒ Merrill R.T., McElhinny M.W., McFadden P.L. The magnetic field of the Earth, paleomagnetism, the core and the deep mantle// Intern. Geophysics. V. 63. Academic Press/ 531 pp. 1998.
– NGDC. https://ngdc.noaagov/geomag/data/poles/SP.xy
‒ Newitt L.R., Mandea M., McKee L.A., Orgeval J.-J. Recent acceleration of the North Magnetic Pole linked to magnetic jerks // Eos. Trans. AGU. V. 83. № 381. 2002.
‒ Newitt L.R., Chulliat A., Orgeval J.-J. Location of the North Magnetic Pole in April 2007 // Earth Planets Space. V. 61. P. 703–710. 2009.
‒ Regi M., Di Mauro D., Lepidi S. The Location of the Earth’s Magnetic Poles From Circum Terrestrial Observations. // J. Geophys. Res.: Space Physics. V. 126. Is. 2. 2021. https://doi.org/10.1029/2020JA028513
‒ Ross J.C. A voyage of discovery and research in the southern and Antarctic regions, during the years 1839–43. London: John Murray. V. 1. 414 p. V. 2. 516 p. 1847.
– Valet J.-P., Valladas H. The Laschamp-Mono lake geomagnetic events and the extinction of Neanderthal: a causal link or a coincidence? // Quaternary Science Reviews. V. 29. Is. 27–28. P. 3887–3893. 2010. https://doi.org/10.1016/j.quascirev.2010.09.010
– Voyage au Pôle sud et dans l’Océanie sur les corvettes “l’Astrolabe” et “la Zélée”, exécuté par ordre du Roi pendant les années 1837–1838–1839–1840 sous le commandement de M. J. Dumont-d’Urville, capitaine de vaisseau. Publié par ordonnance de Sa Majesté, sous la direction supérieure de M. Jacquinot, capitaine de vaisseau, commandant de “La Zélée”, rédigé à partir du tome 4 concernant l’Histoire du voyage par Vincendon-Dumoulin, hydrographe de l’expédition, à la suite du décès de Dumont-d’Urville, Paris, Gide éditeur, 1842–1846.
‒ Wasserfall K.F. On the diurnal variation of the magnetic pole // Terr. Magn. V. 43. P. 219–225. 1938.
‒ Witze A. Earth’s magnetic field is acting up // Nature. V. 565(7738). P. 143–144. 2019. https://doi.org/10.1038/d41586-019-00007-1
Дополнительные материалы отсутствуют.
Инструменты
Геомагнетизм и аэрономия