

Геомагнетизм и аэрономия, 2022, T. 62, № 4, стр. 470-481
Прогнозирование геомагнитных бурь на основе нейросетевой цифровой обработки совместных наблюдений мюонного годоскопа УРАГАН и станций нейтронных мониторов
В. Г. Гетманов 1, 2, *, В. Е. Чинкин 1, **, Р. В. Сидоров 1, ***, А. Д. Гвишиани 1, 2, ****, М. Н. Добровольский 1, *****, А. А. Соловьев 1, 2, ******, А. Н. Дмитриева 1, 3, *******, А. А. Ковыляева 1, 3, ********, И. И. Яшин 1, 3, *********
1 Геофизический центр РАН
г. Моcква, Россия
2 Институт физики Земли им. О.Ю. Шмидта РАН
г. Москва, Россия
3 Национальный исследовательский ядерный университет “МИФИ”
г. Москва, Россия
* E-mail: vgetm2015@yandex.ru
** E-mail: v.chinkin@gcras.ru
*** E-mail: r.sidorov@gcras.ru
**** E-mail: adg@wdcb.ru
***** E-mail: m.dobrovolsky@gcras.ru
****** E-mail: a.soloviev@gcras.ru
******* E-mail: ANDmitriyeva@mephi.ru
******** E-mail: AAKovylyaeva@mephi.ru
********* E-mail: IIYashin@mephi.ru
Поступила в редакцию 13.10.2021
После доработки 21.01.2022
Принята к публикации 30.03.2022
- EDN: ZFTASO
- DOI: 10.31857/S0016794022040083
Аннотация
Предложен метод прогнозирования геомагнитных бурь, основанный на нейросетевой цифровой обработке совместных наблюдений мюонного годоскопа УРАГАН и международной системы станций нейтронных мониторов; использовались временны́е ряды Dst-индексов. Разработаны формулы экстраполяции модельных оценок Dst-индексов. Была применена полносвязная нейронная сеть прямого распространения. Реализовано правило принятия решений по прогнозированию. Сформированы оценки вероятностных характеристик прогнозирования геомагнитных бурь. Экспериментальное исследование метода прогнозирования подтвердило его эффективность. Показано, что наблюдения системы годоскоп–мониторы повысили вероятность правильного прогнозирования геомагнитных бурь по сравнению с использованием каждого из видов наблюдений по отдельности.
1. ВВЕДЕНИЕ
Геомагнитные возмущения возникают обычно при экстремальных событиях в гелиосфере, которые являются следствием плазменных образований в виде солнечных корональных выбросов масс (СМЕ – Coronal Mass Ejection). Геомагнитными бурями (ГМБ) принято считать геомагнитные возмущения, имеющие амплитуды больше заданной. Прогнозирование ГМБ представляет собой актуальную научную проблему, которая к настоящему времени не решена исчерпывающим образом.
Геомагнитная активность характеризуется различными геомагнитными индексами, среди которых являются достаточно распространенными k-, kр- и aр-индексы [Menvielle еt al., 2011]. Данная статья основана на применении часто используемых в практике геомагнетизма Dst-индексов [Sugiura and Kamei, 1991]. Эти индексы, измеряемые в нанотеслах (нТл), определяются почасовым усреднением значений меридиональных составляющих геомагнитного поля для магнитных обсерваторий, расположенных по экватору Земли. Для спокойных состояний магнитосферы Dst-индексы принимают, в основном, значения в пределах –50…+20 нТл; для ГМБ Dst-индексы принимают значения в диапазоне –150…–50 нТл и в исключительных случаях выходят за указанный диапазон.
В статье используется информация из следующих источников:
1. Временнóй ряд матричных наблюдений из базы данных [Real-time URAGAN, 2015] мюонного годоскопа (Muon Hodoscope – МH) УРАГАН, сконструированного в МИФИ [Yashin et al., 2015]. Здесь рассматривается один из возможных вариантов упрощения решения задачи прогнозирования ГМБ, который состоит в том, что временнóй ряд матричных наблюдений мюонного годоскопа преобразуется в скалярный временнóй ряд, полученный посредством усреднения матриц МН-наблюдений. Указанный временнóй ряд образуют величины МН-наблюдений, пропорциональные интенсивности потоков мюонов, регистрируемых годоскопом УРАГАН. Матричные временны́е ряды МH-наблюдений для прогнозирования ГМБ станут предметом исследований в следующих публикациях.
2. Временнóй ряд скалярных наблюдений международной системы станций нейтронных мониторов (Neutron Monitor – NМ) [NMDB, 2021]. Здесь используются функции изотропных составляющих NM-наблюдений, полученные на основе метода глобальной съемки [Абунина и др., 2018]. Данный временнóй ряд образуют величины NМ-наблюдений, пропорциональные интенсивности потоков нейтронов, регистрируемых нейтронными мониторами.
3. Временнóй ряд скалярных Dst-индексов на сайте WDCG – World Data Center of Geomagnetism, Kуoto [World Data Center, 2021].
Прогнозирования ГМБ определяются видом используемых информационных источников, применяемой аппаратурой, математических методов и вариантами реализуемых прикладных задач. Существует целый ряд служб различной ведомственной и государственной принадлежности, которые публикуют информацию по прогнозированию ГМБ.
Для РФ следует отметить Центр прогнозирования космической погоды ИЗМИРАН [Гайдаш и др., 2016; Центр прогнозов, 2016; Gaidash et al., 2017], который выдает потребителям более 20 видов продуктов, связанных с прогнозированием космической погоды и ГМБ, в том числе: 3-х суточный прогноз трехчасовых k- и kp-индексов, 8-ми суточный геомагнитный прогноз на основе среднесуточных aр-индексов и вероятностей наибольших kр-индексов в сутках, прогноз геомагнитной активности на основе ар-индексов на 55 сут вперед и т.д.
Заметной является деятельность Лаборатории рентгеновской астрономии ФИАН в решении проблемы прогнозирования ГМБ с привлечением технологий солнечной радиографии. На сайте [Лаборатория рентгеновской, 2017] приводятся вычисления kр-индексов на 3-х дневный и 27-дневный интервалы прогнозирования, которые осуществляются с учетом оценок параметров солнечного ветра.
Необходимо упомянуть подразделение Space Whether Prediction Center NOAA (National Oceanic and Atmospheric Administration, CША) [NOAA/ NWS, 2021], занимающееся вариантами прогнозирований ГМБ. На сайте NOAA помещаются данные по kр и aр-индексам для 1–4-х недельных интервалов прогнозирований. Для решения задач прогнозирований ГМБ используются снимки ультрафиолетового телескопа EIT (Extreme Ultraviolet Imaging Telescope) и солнечного коронографа LASCO (Large Angle and Spectrometric Coronagraph) [NOAA/NWS, 2021], с помощью которых оцениваются характеристики нагрева солнечной короны и процессы в CME, а также определяется влияние короны на солнечный ветер. Изображения LASCO используются для прогнозирующей модели WSA-Enlil [NOAA/NWS, 2021], которая действует с 2011 г. Эта крупномасштабная физическая модель гелиосферы предназначена для обеспечения заблаговременного предупреждения за 1‒4 дня об изменениях в структурах солнечного ветра и направлений движений CME. Используется космический аппарат (КА)АСЕ (Advanced Composition Explorer, USA) [NOAA/NWS, 2021], запущенный в 1997 г., постоянно находящийся в точке Лагранжа, расположенной на расстоянии 1.44 млн км от Земли на прямой, соединяющей Землю и Солнце. Данный КА, который можно принять в качестве патрульного, непрерывно регистрирует параметры солнечного ветра и межпланетного магнитного поля и автоматически передает их на Землю; зарегистрированные параметры размещаются на веб-сайтах NOAA для принятия последующих оперативных решений.
Прогнозирование ГМБ может реализовываться на основе целого ряда методов, например, с применением вероятностных моделей или распознаванием аномалий во временны́х рядах. Так, в статьях [Добровольский и др., 2019; Chinkin et al., 2019] для матричных MH-наблюдений предлагается применение специальных двумерных функций вариаций мюонных потоков и индикаторных матриц.
Нейронные сети (Neural Networks – NN) широко используются в солнечно-земной физике в задачах прогнозирования (распознавания) экстремальных событий в гелиосфере и магнитосфере [Бархатов и Ревунов, 2010]. Целый ряд публикаций, связанных с NN, Dst-индексами и ГМБ, отличаются вариантами применяемых методов, программных продуктов и используемых информационных источников (баз данных). Указанные обстоятельства вносят значительные разнообразия в постановки задач.
В публикациях [Бархатов и др., 2001; Ефиторов и др., 2018; Широкий, 2015; Dolenko et al., 2005; Gruet et al., 2018; Pallocchia еt al., 2006; Stepanova and Pérez, 2000; Wu and Lundstedt, 1997] помещены материалы, касающиеся исследований возможностей прогнозирований ГМБ, реализуемых с помощью вариантов NN.
Целью данной работы является разработка метода прогнозирования ГМБ, базирующегося на моделях Dst-индексов, совместном использовании МH и NМ-наблюдений, технологии экстраполяции и применения NN. Предлагаемая постановка в некоторых деталях может считаться дополнительной по отношению к перечисленным публикациям. Полученные в статье результаты по прогнозированию ГМБ на основе нейросетевых модельных оценок Dst-индексов с экстраполяцией предназначены для целого ряда научных и технических приложений, например, при возможном внезапном отсутствии (пропуске) Dst-индексов, прогнозирование ГМБ может быть реализовано на основе заранее построенных моделей Dst-индексов, работающих только на основе МH и NМ-наблюдений. Предлагаемое прогнозирование ГМБ может оказаться альтернативным при возможных сбоях работы патрульного КА.
2. АНАЛИЗ DST-ИНДЕКСОВ И MH, NM-НАБЛЮДЕНИЙ
Все переменные, которые использовались для NN в рамках данной статьи, были синхронизированы и подвергнуты дискретизации часовым шагом в единой шкале времени UTC. Временнóй индекс k определял моменты дискретизации Tk, T = 1 ч. Dst-индексы YD(k) и NМ-наблюдения YN(k) реализовывались на интервале времени 01.01.2002–31.12.2018, МH-наблюдения YM(k) – на интервале 01.01.2008–31.12.2018. Начальный и конечный индексы для YD принимали значения k0 = 1, kf = 149 016, для YM – индексы k01 = 52 285, kf = 149 016, для YN – k02 = 1, kf = 149 016.
На рисунке 1 помещены примеры графиков фрагментов исходных переменных YD = YD(k), YM = YM(k) и YN = YN(k) для шестимесячного временнóго интервала 01.04.2012–30.09.2012 в зависимости от времени Tk. ГМБ-события определялись неравенством YD(k) ≤ YD0. Для порога YD0 = = –50 нТл на данном интервале имели место 9 ГМБ-событий. Анализ YD(k) на рис. 1 позволил сделать вывод, что средняя продолжительность ГМБ составила величину порядка 2–2.5 сут. Рассмотрение исходных переменных дало возможность заключить, что для них средний период аддитивных неинформативных низкочастотных трендов, подлежащих фильтрации, составил величину примерно 60–75 сут. На рисунке 1 неинформативные тренды YDФ0(k), YMФ0(k) и YNФ0(k) показаны плавными линиями.
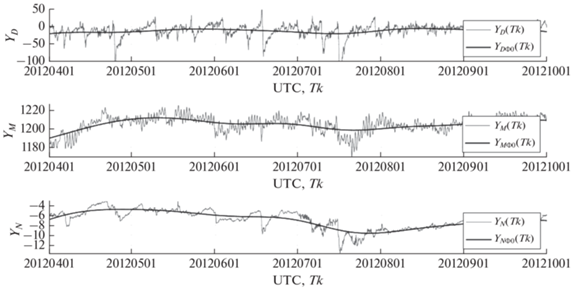
Видно из графиков, что переменные YD(k) и YN(k) можно представить в виде суммы информативных низкочастотных трендов и высокочастотных шумов. Переменную YM(k) можно представить в виде суммы информативного низкочастотного тренда, помеховых составляющих от суточных колебаний и высокочастотных шумов. Анализ изменений информативных низкочастотных трендов переменных YM(k), YN(k) позволил сделать вывод об их, в ряде случаев, почти одинаковом поведении во времени.
3. ПОСТАНОВКА ЗАДАЧИ ПРОГНОЗИРОВАНИЯ ГМБ
В практике анализа геомагнитных наблюдений, иногда принято делать заключение о прогнозировании ГМБ по критериям, которые формируются на основе различных вариантов геомагнитных индексов. Достаточно распространенным и, в определенной степени, надежным при прогнозировании ГМБ является критерий, основанный на сравнении Dst-индексов с задаваемым порогом. Однако иногда непосредственное использование Dst-индексов для прогнозирования может оказаться проблематичным в связи с возможным их отсутствием в текущий и последующие моменты времени, по различным причинам.
Между Dst-индексами и величинами МН, МN-наблюдений имеет место вполне определенная функциональная связь, которая может быть представлена модельной схемой на основе [Borog, 2008]. Функции Dst-индексов выполняют роль индикаторов ГМБ и их величины определяются интенсивностью взаимодействия образований СМЕ с магнитосферой Земли. Время движения СМЕ от Солнца до Земли и время возникновения ГМБ, если его отсчитывать от момента выброса СМЕ, обычно составляет 1.5‒2 сут. Одновременно СМЕ модулируют интенсивности потоков релятивистских протонов, направляющихся к Земле; время их движения от Солнца к Земле составляет порядка 8 мин. Потоки протонов вступают в ядерные реакции с атомами веществ верхних слоев атмосферы, в результате этих реакций образуются потоки мюонов и нейтронов, интенсивность которых регистрируется годоскопом УРАГАН и нейтронными мониторами. Модуляции интенсивностей потоков протонов при определенных условиях, вызывают модуляции интенсивностей образовавшихся потоков мюонов и нейтронов – величин МН, МN-наблюдений. Возникновение модуляций потоков мюонов и нейтронов происходит по времени существенно раньше возникновения ГМБ; данное обстоятельство положено в основу предлагаемого метода прогнозирования ГМБ.
Будем полагать, что:
– задан рассматриваемый текущий момент времени, которому соответствует временнóй индекс k, удовлетворяющий неравенствам kf0 + 1 ≤ ≤ k ≤ kf. Предшествующими моментами времени будем считать моменты, которым соответствуют временны́е индексы kf0 + 1, …, k – 1, где kf0 – заданный временнóй индекс; начальный индекс k0, конечный индекс kf и заданный индекс kf0 связаны неравенствами k0 < kf0 < kf.
– на интервале k01 ≤ k ≤ kf0 реализован временнóй ряд МН-наблюдений и временнóй ряд Dst-индексов, в интервале k02 ≤ k ≤ kf0 – временнóй ряд NМ-наблюдений и временнóй ряд значений Dst-индексов.
– на интервале kf0 + 1, k – 1, k реализованы только временны́е ряды МН и NМ-наблюдений;
Прогнозирование ГМБ будем рассматривать относительно текущих моментов времени с индексами k на ke индексов вперед.
Цель работы состоит в том, чтобы на основе реализованных временны́х рядов Dst- индексов и МН, NМ-наблюдений на интервалах k01 ≤ k ≤ kf0, k02 ≤ k ≤ kf0 сформировать на интервале kf 0 + 1 ≤ k ≤ kf. систему модельных оценок Dst-индексов и использовать их для прогнозирования ГМБ. Для данной задачи применим полносвязную NN прямого распространения и технологию экстраполяции при формировании модельных оценок Dst-индексов.
4. ОБЩИЙ ПЛАН РЕШЕНИЯ ЗАДАЧИ ПРОГНОЗИРОВАНИЯ ГМБ И ФОРМУЛЫ ЭКСТРАПОЛЯЦИИ
4.1. Общий план решения задачи прогнозирования ГМБ с учетом формулировки в п. 3 постановки подразделяется на пять пунктов, включающих:
1. Алгоритмы предварительной цифровой обработки исходных Dst-индексов и МН, NМ-наблюдений для выделения в них существенных информативных составляющих;
2. Алгоритмы обучения и валидации NN;
3. Алгоритм экстраполяции МН, NМ-наблюдений;
4. Алгоритм тестирования – вычисления модельных оценок Dst-индексов с экстраполяцией на основе NN с использованием экстраполированных МН, NМ-наблюдений;
5. Алгоритм правила принятия решений для прогнозирования ГМБ.
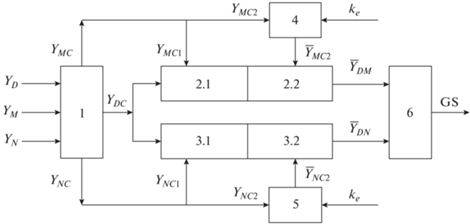
На рисунке 2 представлена схема вычислительных операций, которая поясняет решение задачи прогнозирования ГМБ. Вычислительные операции подразделены на: блок 1 предварительной цифровой обработки; блоки 2.1, 3.1 обучения MH, NM-нейронной сети; блоки 4, 5 экстраполяции; блоки 2.2, 3.2 вычисления модельных оценок Dst-индексов для МН, NM; блок 6 принятия решений по прогнозированию ГМБ.
Алгоритмы предварительной цифровой обработки для исходных Dst-индексов YD = YD(k) и МН, NМ-наблюдений YM = YM(k), YN = YN(k) реализуют их фильтрацию [Filter Design, 2021] с целью устранения высокочастотных шумов и суточных колебаний, удаление низкочастотных неинформативных трендов и масштабирование для обеспечения соизмеримости исходных переменных, которая необходима для эффективной работы NN.
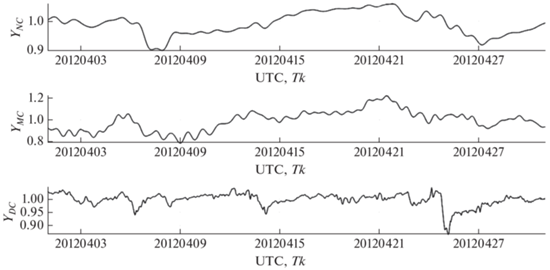
Результаты предварительной цифровой обработки обозначаются как YDС = YDС(k), YMС = YMС(k) и YNС = YNС(k). Операция масштабирования приводит результаты предварительной обработки к единому диапазону: Ymin ≤ YMС(k) ≤ Ymax, Ymin ≤ ≤ YNС(k) ≤ Ymax, Ymin ≤ YDС(k) ≤ Ymax, Ymin = 0.7, Ymax = = 1.3. На рис. 3 представлены примеры графиков фрагментов переменных YMС = YMС(k), YNС = = YNС(k) и YDС = YDС(k), полученных в результате предварительной цифровой обработки на месячном интервале времени 01.04.2012–30.04.2012.
Рис. 3.
Графики переменных YMP(k), YNP(k) и YDP(k), полученных в результате предварительной цифровой обработки на месячном интервале.
Этап обучения NN для переменных MH YMС1(k) реализуется на интервале с индексами k01 + dk01 + 1 ≤ k ≤ kf0, для переменных NM YNС1(k) – на индексах k02 + dk02 + 1 ≤ k ≤ kf0, на указанных интервалах реализуются переменные YDС(k). Величины dk01, dk02 задаются. На вход NN подаются скользящие с единичным шагом последовательности векторов размерности ∆k, образованные указанными переменными. Этап валидации нейросетевых моделей после обучения для переменных MH осуществляется для индексов k01 ≤ k ≤ ≤ k01 + dk01, для переменных NM на индексах k02 ≤ k ≤ k02 + dk02. В результате этапов обучения и валидации производятся формирования MH, NM-нейросетевых моделей для Dst-индексов. Этап тестирования отводится для вычислений модельных Dst-индексов на основе нейросетевых моделей на интервале с индексами kf0 + 1 ≤ k ≤ kf . Для тестирования реализуется алгоритм экстраполяции над переменными YMС2(k) и YNС2(k) с целью последующего использования экстраполяций в сформированных нейросетевых моделях.
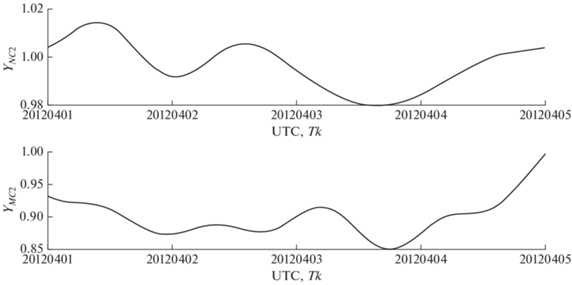
На рисунке 4 приведены примеры графиков переменных YMС = YMС2(k), YNС = YNС2(k), полученных в результате фильтрации и масштабирования на 4-х дневном интервале 01.04.2012–04.04.2012 и подготовленных для экстраполирования. Можно заключить, что переменные YMС2(k), YNС2(k) хорошо приспособлены для реализации экстраполирования: видно, что вполне допустима их успешная экстраполяция на основе параболических функций по крайней мере на ke = 5–10 шагов вперед.
Рис. 4.
Графики переменных YMP2(k), YNP2(k), полученных в результате операций фильтрации и масштабирования на 4-х дневном интервале 01.04.2012–04.04.2012 г.
4.2. Формулы экстраполяции реализуются на основе построения аппроксимационных параболических моделей относительно текущего индекса k; назначается параметр экстраполяции ke – количество шагов экстраполяции k + 1, k + 2, …, k + ke. Задается ka – количество индексов на интервале k, k – 1, …, k – ka + 1, на котором предполагается производить построение аппроксимационной модели. Формируются аппроксимационные параболические функциями с параметрами $c_{1}^{Т} = ({{с}_{{01}}},{{с}_{{11}}},{{с}_{{21}}})$, $c_{2}^{Т} = ({{с}_{{02}}},{{с}_{{12}}},{{с}_{{22}}})$ и аппроксимационные функционалы
(1)
$\begin{gathered} {{{\bar {Y}}}_{{MС2}}}(k,{{k}_{e}}) = c_{{01}}^{^\circ } + c_{{11}}^{^\circ }k + c_{{21}}^{^\circ }{{k}^{2}}, \\ {{{\bar {Y}}}_{{NС2}}}(k,{{k}_{e}}) = c_{{02}}^{^\circ } + c_{{12}}^{^\circ }k + c_{{22}}^{^\circ }{{k}^{2}}. \\ \end{gathered} $(2)
$\begin{gathered} \bar {Y}_{{MС2}}^{{}}(k,{{k}_{e}}) = {{{\bar {Y}}}_{{MС2}}}(k), \\ \bar {Y}_{{NС2}}^{{}}(k,{{k}_{e}}) = {{{\bar {Y}}}_{{NС2}}}(k). \\ \end{gathered} $(3)
${{k}_{{1T}}} = {{k}_{{f0}}} - {{k}_{e}} + \Delta k,\,\,\,\,{{k}_{{2T}}} = {{k}_{f}} - {{k}_{e}}.$Алгоритм правила принятия решений для прогнозирования ГМБ основывается на вычисленных скользящих экстраполированных модельных оценках Dst-индексов ȲDM, ȲDN и сравнении их с задаваемым порогом YD0. Принятие решений о прогнозировании ГМБ реализуется на интервале k1T ≤ k ≤ k2T (3).
5. АРХИТЕКТУРА НЕЙРОННОЙ СЕТИ
Результаты, полученные выше, основываются на полносвязной NN прямого распространения, сформированной с использованием универсального программного продукта [Deep Learning, 2021]. Применение NN этого типа обусловливается тем, что исходные данные и наблюдения в данном случае представляют собой скалярные временны́е ряды.
Архитектура используемой NN представлена на рис. 5. Были реализованы 4 слоя (СL – Сonnected Layer) с входными переменными YDС, YMС1, YNС1, на основе которых формировались входные последовательности векторов размерности ∆k. Использовались функции активации f(x) = 1, x > 0, f(x) = 0, x ≤ 0. Выходы от четырех слоев CL1–CL4 подавались на суммирующий полносвязный слой (FCL – Fully Connected Layer). Выходом NN на этапе обучения являются сформированные нейросетевые модели.
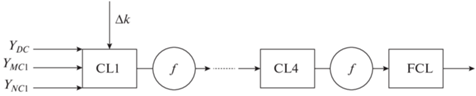
Индексы интервалов исходных переменных принимали численные значения в соответствие с п.2 и были назначены dk01 = 12 000, dk02 = 15 000. Назначался индекс kf0 = 131 810, соответствующий дате 01.01.2017 г., определявший 8-ми летний интервал обучения 01.01.2008–31.12.2016 для МН и 14-ти летний интервал 01.01.2002–31.12.2016 для NM. 2-х летний интервал 01.01.2017–31.12.2018 отводился на вычисления модельных оценок Dst-индексов на основе MH, NM-наблюдений с использованием нейросетевых модельных структур.
6. ПРАВИЛО ПРИНЯТИЯ РЕШЕНИЙ ПО ПРОГНОЗИРОВАНИЮ ГМБ
Метод прогнозирования ГМБ сведем к процедуре классификации [Фомин, 2010; Bishop, 2006], основанной на сравнении экстраполированных модельных оценок Dst-индексов с задаваемым порогом для текущего индекса k с учетом шагов экстраполяции ke.
Сформируем правило принятия решений о прогнозировании ГМБ на основе совместного использования МН, NM-модельных оценок Dst-индексов, которое состоит в том, что если будет выполняться хотя бы одно или оба условия для текущего индекса k
(4)
$\begin{gathered} \bar {Y}_{{DM}}^{{}}(k,{{k}_{e}}) \leqslant {{Y}_{{D0}}}\,\,\,\,{{\text{и}} \mathord{\left/ {\vphantom {{\text{и}} {{\text{или}}}}} \right. \kern-0em} {{\text{или}}}}\,\,\,\,\bar {Y}_{{DN}}^{{}}(k,{{k}_{e}}) \leqslant {{Y}_{{D0}}}, \\ {{k}_{{1T}}} \leqslant k \leqslant {{k}_{{2T}}}, \\ \end{gathered} $Сделаем пояснения по поводу реализации прогнозирования. Положим, что возможная ГМБ реализовывалась на временнóм интервале с индексами, которые удовлетворяли неравенствам kGS1 ≤ k ≤ kGS2. По-прежнему будем считать, что прогнозирование осуществляется для момента времени с индексом k на ke индексов вперед. Рассмотрим два возможных варианта: 1. когда момент k принятия решения по прогнозированию находится вне интервала с ГМБ, 2. когда момент k принятия решения по прогнозированию находится внутри интервала с ГМБ. В том случае, даже если в обоих вариантах прогнозирования реализовались, что эквивалентно неравенству kGS1 ≤ ke ≤ ≤ kGS2, то эти варианты существенно отличаются. Для первого варианта реализованный вариант является вполне полноценным, поскольку прогнозирование осуществилось заблаговременно по отношению к ГМБ. Во втором варианте прогнозирование осуществилось, когда ГМБ уже наступила. На рис. 6а, б приводятся прогнозирования по первому и второму вариантам. Первому и второму варианту прогнозирования ГМБ соответствуют следующие неравенства

7. ВЫЧИСЛЕНИЕ ОЦЕНОК ВЕРОЯТНОСТЕЙ ПРАВИЛЬНОГО И ЛОЖНОГО ПРОГНОЗИРОВАНИЯ ГМБ
Прогнозирование ГМБ, обычно сопровождается погрешностями – пропусками правильных и образованиями ложных прогнозирований. Данные погрешности зависят от вероятностных характеристик переменных ȲDM, ȲDN. Воспользуемся результатами работы [Мерков, 2014; Михайлов и Войтишек, 2006] для их приближенного вычисления. Сформируем оценки вероятностей погрешностей прогнозирований, в которых используем исходные Dst-индексы YD(k), модельные оценки прогнозируемых Dst-индексов ȲDM(k, ke), ȲDN(k, ke) , которые являются случайными. Реализуем вычисления для ряда вариантов шагов экстраполяции ${{k}_{e}}$ и используем правило принятия решений (4).
Фиксируем порог YD0 и рассмотрим момент времени с индексом k + ke, в котором имеет место ГМБ, если выполняется неравенство YD(k + ke) ≤ YD0. Количество NGS состояний с ГМБ, которые определяются выполнениями данного неравенства на интервале k1T ≤ k ≤ k2T вычислим с помощью следующей суммы
(5)
${{N}_{{GS}}} = \sum\limits_{k{\kern 1pt} = {\kern 1pt} {{k}_{{1T}}}}^{{{k}_{{2T}}}} {{\text{sign}}({{Y}_{{D0}}} - {{Y}_{D}}(k + {{k}_{e}}))} ,$(6)
$\begin{gathered} {{N}_{{M,GS}}} = \sum\limits_{k{\kern 1pt} = {\kern 1pt} {{k}_{{1T}}}}^{{{k}_{{2T`}}}} {{\text{sign}}({{Y}_{{D0}}} - {{Y}_{D}}(k + {{k}_{e}}))} \times \\ \times \,\,{\text{sign}}({{Y}_{{D0}}} - \bar {Y}_{{DM}}^{{}}(k,{{k}_{e}})),\,\,\,\,\beta _{M}^{^\circ } = \frac{{{{N}_{{M,GS}}}}}{{{{N}_{{GS}}}}}. \\ \end{gathered} $(7)
$\begin{gathered} {{N}_{{N,GS}}} = \sum\limits_{k{\kern 1pt} = {\kern 1pt} {{k}_{{1T}}}}^{{{k}_{{2T}}}} {{\text{sign}}({{Y}_{{D0}}} - {{Y}_{D}}(k + {{k}_{e}}))} \times \hfill \\ \times \,\,{\text{sign}}({{Y}_{{D0}}} - \bar {Y}_{{DN}}^{{}}(k,{{k}_{e}})),\,\,\,\,\beta _{N}^{^\circ } = \frac{{{{N}_{{N,GS}}}}}{{{{N}_{{GS}}}}}. \hfill \\ \end{gathered} $(8)
$\begin{gathered} {{N}_{{MN,GS}}} = \sum\limits_{k{\kern 1pt} = {\kern 1pt} {{k}_{{1T}}}}^{{{k}_{{2T}}}} {{\text{sign}}[{{Y}_{{D0}}} - {{Y}_{D}}(k + {{k}_{e}}))} \times \\ \times \,\,{\text{sign}}({\text{sign}}({{Y}_{{D0}}} - \bar {Y}_{{DN}}^{{}}(k,{{k}_{e}})) + \\ + \,\,{\text{sign}}({{Y}_{{D0}}} - \bar {Y}_{{DM}}^{{}}(k,{{k}_{e}}))],\,\,\,\,\beta _{{MN}}^{^\circ } = \frac{{{{N}_{{MN,GS}}}}}{{{{N}_{{GS}}}}}. \\ \end{gathered} $8. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ МЕТОДА ПРОГНОЗИРОВАНИЯ ГМБ
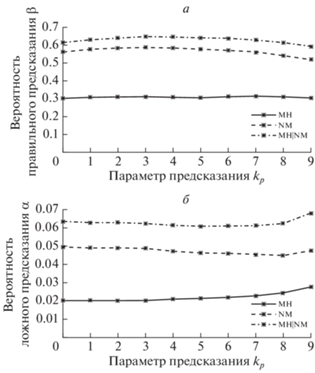
8.1. Оценивание вероятности правильного и ложного прогнозирования ГМБ в зависимости от шага экстраполяции ke. На интервале с индексами k1T ≤ k ≤ k2T был рассмотрен временнóй ряд YD(k) Dst-индексов из базы данных [World Data Сеnter, 2021]. Для заданных целочисленных параметров ke вычислялись экстраполированные модельные оценки ȲDM(k, ke), ȲDN(k, ke) и производились их сравнения с порогом YD0, а также определялись вероятности правильного и ложного прогнозирования ГМБ по формулам (5)–(8) в зависимости от параметра ke для диапазона ${{k}_{{e,mn}}} \leqslant {{k}_{e}} \leqslant {{k}_{{e,mx}}}$, ${{k}_{{e,mn}}} = 0,$ ${{k}_{{e,mx}}} = 9$ при YD0 = –50 нТл.
На рисунке 7а, б представлены графики результатов расчетов оценок вероятностей правильного прогнозирования $\beta _{M}^{^\circ }$(МН), $\beta _{N}^{^\circ }$(NM), $\beta _{{MN}}^{^\circ }$(MH|NM) и вероятностей ложного прогнозирования $\alpha _{M}^{^\circ }$(МН), $\alpha _{N}^{^\circ }$(NM), $\alpha _{{MN}}^{^\circ }$(MH|NM) в зависимости от ke. Из представленных графиков с результатами расчетов видно, что совместное использование МH и NМ-наблюдений повысило эффективность прогнозирования ГМБ. Из рисунка 7а можно заключить, что для параметра прогнозирования ke = 5, вероятность правильного совместного прогнозирования ГМБ принимала максимальное значение и составляла величину $\beta _{{MN}}^{^\circ } \approx 0.65$ что больше соответствующей величины $\beta _{N}^{^\circ } \approx 0.57$ на 13–15%. Вероятность ложного совместного прогнозирования, в соответствии с рис. 7б, не превысила величины $\alpha _{{MN}}^{^\circ } \approx 0.06$.
Рис. 7.
Оценки $\beta _{M}^{^\circ }$, $\beta _{N}^{^\circ }$, $\beta _{{MN}}^{^\circ }$ вероятностей правильного прогнозирования ГМБ ‒ (а). Оценки $\alpha _{M}^{^\circ }$, $\alpha _{N}^{^\circ }$, $\alpha _{{MN}}^{^\circ }$ вероятностей ложного прогнозирования ГМБ ‒ (б).
8.2. Вычисление прогнозирований ГМБ на заданном временнóм интервале. Рассматривался исходный временнóй интервал с индексами k1T ≤ k ≤ k2T, на котором вычислялись модельные оценки Dst-индексов и решалась задача прогнозирования ГМБ. На этом интервале формировался временнóй ряд YD(k) и для заданных значений параметра экстраполяции ke вычислялись экстраполированные модельные оценки ȲDM(k, ke), ȲDN(k, ke).
Рассматривался контрольный интервал с индексами k1C, k2C, которые удовлетворяли неравенствам k1T < k1C ≤ k ≤ k2C < k2T. Определялись последовательности интервалов kGS1 ≤ k ≤ kGS2 в которых имели место ГМБ с помощью проверки неравенства для скользящих k и заданного значения параметра экстраполяции ke
При прогнозировании ГМБ учитывалось взаимное расположение интервалов (kGS1, kGS2) и (kM1, kM2), (kN1, kN2). Были введены разности времен ТdkM, ТdkN для раздельных наблюдений и разности ТdkMN, где kMN = max(kM1, kN1) для совместных МН, NM-наблюдений, по которым можно судить об эффективности прогнозирований ГМБ
В зависимости от расположений (kGS1, kGS2) и (kM1, kM2), (kN1, kN2), очевидно, возможны реализации правильных прогнозирований (cf – correct forecasting), пропусков правильных прогнозирований (mcf – miss of correct forecasting) и ложных прогнозирований (ff – false forecasting) ГМБ. Чем больше величины введенных разностей, тем в большей степени заблаговременным является прогнозирование ГМБ. Отрицательные значения для dkM, dkN, dkMN можно принять соответствующими пропускам прогнозирований – mfс.
Для первого примера рассматривался контрольный временнóй пятимесячный интервал 01.05.2017–30.09.2017 г.; были использованы YD =YD(k) и ȲDM = ȲDM(k, ke), ȲDN = ȲDN(k, ke) с ke = 5. На рис. 8а приведены графики для данных переменных. Пунктирной линией отмечен назначенный порог YD0 = –52.5 нТл. Результаты вычислений прогнозирований помещены в табл. 1, для экономии места 2017 год в датах пропущен; в столбцах помещены календарные переменные месяц, день, час, полученные на основе преобразования индексов k. В столбцах 2, 3 помещены времена интервалов (TkGS1, TkGS2) начала и конца событий, обусловленные понижениями YD(k), которые могут оказаться ГМБ-событиями, первый столбец определял номера N0 интервалов с ГМБ-событиями. В столбцах 4, 5 и 7, 8 помещены времена интервалов (TkM1, TkM2), (TkN1, TkN2) с точностью до часа. Всего реализовалось 5 ГМБ-cобытий. Из содержимого столбца 10 со временем прогнозирования Тdke = max(ТdkM, ТdkN) можно заключить, что правильные прогнозирования ГМБ были осуществлены в четырех событиях – Ncf = 4: для № 1 – прогнозирование реализовывалось за 3 ч, № 2 – за 4 ч, № 3 – за 2 ч, № 4 – за 5 ч. Для события № 5 имел место пропуск правильного прогнозирования – Nmf = 1. Имело место 0 ложных прогнозирований – Nff = 0.
Рис. 8.
Графики переменных YD(k), ${{\bar {Y}}_{{DM}}}$(k, ke) и ${{\bar {Y}}_{{DN}}}$(k, ke), ke = 5 ‒ (а). Графики переменных YD(k), ${{\bar {Y}}_{{DM}}}$(k, ke) и ${{\bar {Y}}_{{DN}}}$(k, ke), ke = 7 ‒ (б).
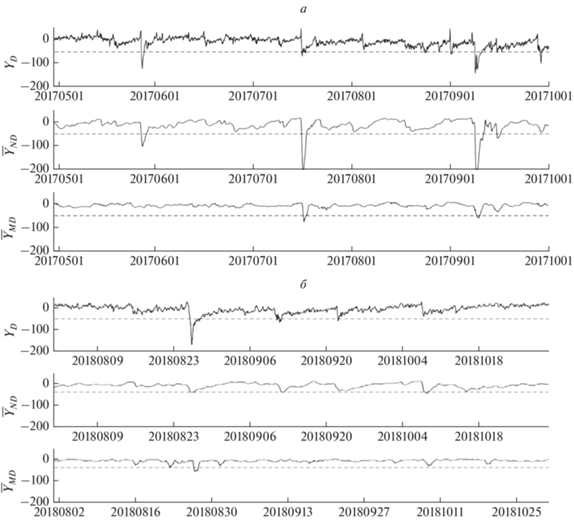
Таблица 1.
Экстраполяция kе = 5, 2017 г.
| N0 | ТkGS1 | ТkGS2 | ТkM1 | ТkM2 | ТdkM | ТkN1 | ТkN2 | ТdkN | Tdkе |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 05.28.00 | 05.28.20 | – | – | – | 05.27.21 | 05.29.11 | +3 | +3–cf |
| 2 | 07.16.12 | 07.17.17 | 07.16.21 | 07.17.17 | –5 | 07.16.08 | 07.17.21 | +4 | +4–cf |
| 3 | 09.07.23 | 09.10.03 | 09.08.03 | 09.08.21 | –4 | 09.07.21 | 09.10.09 | +2 | +2–cf |
| 4 | 09.14.20 | 09.14.21 | – | – | – | 09.14.15 | 09.15.17 | +5 | +5–cf |
| 5 | 09.28.01 | 09.28.13 | – | – | – | – | – | – | –mсf |
Для второго примера рассматривался контрольный трехмесячный интервал 2015.08.01–2015.10.31 и использованы YD = YD(k) и ${{\bar {Y}}_{{DM}}}$ = = ${{\bar {Y}}_{{DM}}}$(k, ke), ${{\bar {Y}}_{{DN}}}$ =${{\bar {Y}}_{{DN}}}$(k, ke) с ke = 7, назначен порог YD0 = –52.5 нТл. На рис. 8б изображены соответствующие графики переменных, пунктирной линией отмечен порог. Результаты вычислений помещены в табл. 2. Реализовалось три ГМБ-события в течение рассматриваемого трехмесячного интервала. Из содержимого столбца 10 можно заключить, что правильные прогнозирования ГМБ были осуществлены в двух случаях – Ncf = 2: для № 1 – прогнозирование реализовывалось за 1 ч, № 2 – за 7 ч. Имело место одно ложное прогнозирование – Nff = 1 и один пропуск прогнозирования – Nmf = 1.
Таблица 2.
Экстраполяция kе = 7, 2015 г.
| N0 | ТkGS1 | ТkGS2 | ТkM1 | ТkM2 | ТdkM | ТkN1 | ТkN2 | ТdkN | Tdkе |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 08.25.23 | 08.26.09 | 08.26.09 | 08.27.11 | –10 | 08.25.22 | 08.26.14 | +1 | +1–cf |
| 2 | 09.10.18 | 09.11.20 | – | – | – | 09.10.11 | 09.10.21 | +7 | +7–cf |
| 3 | 09.22.02 | 09.22.20 | 09.22.11 | 09.22.12 | –9 | – | – | –9 | –9–mсf |
| 4 | 10.07.18 | 10.08.12 | ff |
Для приближенного оценивания эффективности метода прогнозирования ГМБ вводились коэффициенты правильных и ложных прогнозирований εcf и εff, вполне очевидный физический смысл которых вытекает из следующих формул
9. ЗАКЛЮЧЕНИЕ
1. Предложенный метод прогнозирования геомагнитных бурь (ГМБ) на основе совместных наблюдений мюонного годоскопа УРАГАН и нейтронных мониторов с применением полносвязной нейронной сети прямого распространения и использованием экстраполированных модельных оценок Dst-индексов, оказался работоспособным.
2. Исследование предложенного метода прогнозирования ГМБ на наблюдениях мюонного годоскопа, нейтронных мониторов и Dst-индексов, полученных за 2008–2018 гг. и 2002–2018 гг., показало его эффективность.
3. Произведенные расчеты совместного использования МН и NМ-наблюдений показали, что для оптимального параметра предсказания ke = 5 оценка вероятности правильного прогнозирования ГМБ составила величину $\beta _{{MN}}^{^\circ } \approx 0.65$, что больше соответствующей величины $\beta _{N}^{^\circ } \approx 0.57$ на 13–15%; вероятность ложного прогнозирования не превышает величины $\alpha _{{MN}}^{^\circ } \approx 0.06$.
4. Рассмотрение примеров экспериментальных данных на пятимесячных интервалах показало возможность предлагаемого метода реализовать коэффициенты правильного и ложного прогнозирования ≈73%, ≈25%, что свидетельствует о приемлемых возможностях предложенного метода.
5. Предложенный метод прогнозирований ГМБ имеет большие резервы для усовершенствования, в частности, дальнейшей оптимизации настроек параметров нейронной сети с целью повышении вероятностей правильного и снижения вероятностей ложного прогнозирования.
6. Предложенный метод прогнозирований ГМБ имеет благоприятную перспективу его использования в прикладных задачах геофизики.
Список литературы
– Абунина М.А., Абунин А.А., Белов А.В., Ерошенко Е.А., Оленева В.А., Янке В.Г. Метод глобальной съемки для мировой сети нейтронных мониторов // Геомагнетизм и аэрономия. Т. 58. № 3. С. 374–389. 2018.https://doi.org/0.7868/S0016794018030082
– Бархатов Н.А., Ревунов С.Е. Искусственные нейронные сети в задачах солнечно-земной физики. Н. Новгород.: Типография “Поволжье”, 407 с. 2010.
– Бархатов Н.А., Королёв A.В., Пономарев С.М., Сахаров С.Ю. Долгосрочное прогнозирование индексов солнечной активности методом искусственных нейронных сетей // Изв. вузов. Радиофизика. Т. 44. № 9. С. 806–814. 2001.
– Гайдаш С.П., Белов А.В., Абунин А.А., Абунина М.А. Центр прогнозов космической погоды (ИЗМИРАН) / Практические аспекты гелиогеофизики. Материалы специальной секции “Практические аспекты науки космической погоды” одиннадцатой ежегодной конференции “Физика плазмы в солнечной системе”. Москва, 17 февраля 2016 г. Серия “Прикладные аспекты космической погоды”. Ред. А.А. Петрукович, А.М. Мерзлый, С.Ю. Хабибулин. М.: ИКИ РАН. С. 22–32. 2016.
– Добровольский М.Н., Астапов И.И., Барбашина Н.С. и др. Метод поиска локальной анизотропии потоков мюонов в матричных данных годоскопа УРАГАН // Изв. РАН. Сер. физ. Т. 83. № 5. С. 706–708. 2019.https://doi.org/10.1134/S0367676519050120
– Ефиторов А.О. Мягкова И.Н., Широкий В.Р., Доленко С.А. Прогнозирование Dst-индекса, основанное на методах машинного обучения // Космические исследования. Т. 56. № 6. С. 420–428. 2018.https://doi.org/10.31857/S002342060002493-0
– Лаборатория рентгеновской астрономии Солнца, ФИАН. https://tesis.lebedev.ru/. 2021.
– Мерков А.Б. Распознавание образов: Построение и обучение вероятностных моделей. М.: URSS, 238 с. 2014.
– Михайлов Г.А., Войтишек А.В. Численное статистическое моделирование. Методы Монте-Карло. М.: Академия, 368 с. 2006.
– Фомин Я.А. Распознавание образов: теория и применения. М.: Фазис, 368с. 2010.
– Центр прогнозов космической погоды ИЗМИРАН. http://spaceweather.izmiran.ru/. 2016.
– Широкий В.Р. Сравнение нейросетевых моделей прогнозирования геомагнитного Dst индекса на различных наборах данных и сравнение методов оценки качества работы моделей / ХVII Всероссийская научно-техническая конф. “Нейроинформатика-2015” 19–23 янв. 2015, Москва. Сборник научных трудов. Т. 2. М.: НИЯУ МИФИ. С. 51–60. 2015.
– Bishop C.M. Pattern Recognition and Machine Learning. New York: Springer, 758 p. 2006.
–Borog V.V. Fundamentals of muon diagnostics. Moscow: Moscow Engineering Physics Institute (State University), 160 p. 2008.
– Chinkin V.E., Astapov I.I., Gvishiani A.D., Getmanov V.G., Dmitrieva A.N., Dobrovolsky M.N., Kovylyaeva A.A., Sidorov R.V., Soloviev A.A., Yashin I.I. Method for the Identification of Heliospheric Anomalies Based on the Functions of the Characteristic Deviations for the Observation Matrices of the Muon Hodoscope // Phys. Atom. Nuclei. V. 82. P. 924–928. 2019.https://doi.org/10.1134/S106377881966013X
– Deep Learning Toolbox – MATLAB. https://www. mathworks.com/products/deep-learning.html. 2021.
– Dolenko S.A., Orlov Y.V., Persiantsev I.G., Shugai J.S. Neural Network Algorithm for Events Forecasting and Its Application to Space Physics Data / Artificial Neural Networks: Formal Models and Their Applications – ICANN 2005. ICANN 2005. / Lecture Notes in Computer Science, 3697. Duch W., Kacprzyk J., Oja E., Zadrożny S. (eds). Berlin, Heidelberg: Springer. P. 527–532. 2005.https://doi.org/10.1007/11550907_83
– Filter Design Using MATLAB. https://www.mathworks.com/discovery/filter-design.html. 2021.
– Gaidash S.P., Belov A.V., Abunina M.A., Abunin A.A. Space Weather Forecasting at IZMIRAN // Geomagn. Aeron. V. 57. P. 869–876. 2017.https://doi.org/10.1134/S0016793217070088
– Gruet M.A., Chandorkar M., Sicard A., Camporeale E. Multiple-hour-ahead forecast of the Dst index using a combination of long short-term memory neural network and Gaussian process // Space Weather. V. 16. № 11. P. 1882–1896. 2018.https://doi.org/10.1029/2018SW001898
– Menvielle M., Iyemori T., Marchaudon A., Nosé M. Geomagnetic Indices / Geomagnetic Observations and Models / IAGA Special Sopron Book Series, 5. Mandea M., Korte M. (eds) Dordrecht: Springer. P. 183–228. 2011.https://doi.org/10.1007/978-90-481-9858-0_8
– NMDB: the Neutron Monitor Database. https:// www.nmdb.eu/. 2021.
– NOAA/NWS Space Weather Prediction Center. https:// www.swpc.noaa.gov/. 2021.
– Pallocchia G., Amata E., Consolini G., Marcucci M.F., Bertello I. Geomagnetic Dst index forecast based on IMF data only // Ann. Geophys. V. 24. P. 989–999. 2006.https://doi.org/10.5194/angeo-24-989-2006
– Real-time URAGAN data. http://nevod.mephi.ru/uragan_data.htm. 2015.
– Stepanova M.V., Pérez P. Autoprediction of Dst index using neural network techniques and relationship to the auroral geomagnetic indices // Geofísica Internacional. V. 39. № 1. P. 143–146. 2000.https://doi.org/10.22201/igeof.00167169p.2000.39.1.310
– Sugiura M., Kamei T. Equatorial Dst index 1957–1986. IAGA Bulletin № 40. Saint-Maur-des-Fossés: ISGI Publications Office. 251 p. 1991.
– World Data Center for Geomagnetism, Kyoto. http:// wdc.kugi.kyoto-u.ac.jp. 2021.
– Wu J.-G., Lundstedt H. Geomagnetic storm predictions from solar wind data with the use of dynamic neural networks // J. Geophys. Res. V. 102. № A7. P. 14 255–14 268. 1997.https://doi.org/10.1029/97JA00975
– Yashin I.I., Astapov I.I., Barbashina N.S. et al. Real-time data of muon hodoscope URAGAN // Adv. Space Res. V. 56. № 12. P. 2693–2705. 2015.https://doi.org/10.1016/j.asr.2015.06.003
Дополнительные материалы отсутствуют.
Инструменты
Геомагнетизм и аэрономия