

Геомагнетизм и аэрономия, 2022, T. 62, № 4, стр. 528-536
Алгоритм компенсации искажений широкополосных сигналов при распространении по спутниковым ионосферным радиолиниям
В. В. Батанов 1, Л. Е. Назаров 1, 2, *
1 Информационные спутниковые системы им. акад. М.Ф. Решетнева
г. Железногорск (Красноярский край), Россия
2 Институт радиотехники и электроники им. В.А. Котельникова РАН
г. Фрязино (Московская обл.), Россия
* E-mail: levnaz2018@mail.ru
Поступила в редакцию 14.10.2021
После доработки 28.02.2022
Принята к публикации 30.03.2022
- EDN: AKVHAN
- DOI: 10.31857/S0016794022040058
Аннотация
Дано описание распространения сигналов по спутниковым ионосферным радиолиниям. Показано, что при распространении по данным радиолиниям искажаются комплексные огибающие цифровых сигналов при существенном расширении их частотной полосы за счет дисперсионных свойств земной ионосферы. Дана модель искажений сигналов при распространении по этим радиолиниям, действие которых эквивалентно линейной фильтрации. Приведено описание алгоритма компенсации данных искажений путем формирования фильтра, инверсного к фильтру ионосферной радиолинии. Параметры инверсного фильтра вычисляются путем обработки пилот-сигналов. Определено условие корректной работы алгоритма компенсации искажений – дано оценочное значение периода включения пилот-сигналов в сигнальный поток, которое должно быть согласовано с временем стационарности радиолинии, одним из важных ее параметров. Приведены результаты моделирования алгоритма компенсации при приеме используемых в спутниковых информационных системах цифровых сигналов с 16-ти позиционной фазовой манипуляцией, более перспективных, чем сигналы с двоичной фазовой манипуляцией относительно частотной эффективности, но значительно сильнее подверженных искажающему влиянию земной ионосферы. Показана возможность компенсации искажений для рассматриваемого класса сигналов при распространении и достижения вероятностных характеристик при приеме, практически совпадающих с вероятностными характеристиками при распространении в свободном пространстве.
1. ВВЕДЕНИЕ
Расширение частотной полосы сигналов приводит к повышению помехоустойчивости систем связи различного назначения, определяет также повышение точности оцениваемых параметров сигналов систем радиолокационного наблюдения [Скляр, 2003]. Вместе с тем при использовании этих сигналов возникает ряд проблем по отношению к узкополосным сигналам. Одна из важных проблем связана с возникновением значительных искажений комплексных огибающих данных сигналов при распространении по физическим радиолиниям, что требует более сложной обработки при приеме для обеспечения задаваемых вероятностных характеристик. В статье рассматривается распространение широкополосных сигналов по спутниковым радиолиниям, вносящим рассматриваемые искажения [Колосов и др., 1969; Иванов и др., 2015]. Суть данных искажений – изменения фазо- и амплитудно- частотных характеристик сигналов за счет дисперсионных и поглощающих свойств земной ионосферы, что порождает интерференционные мультипликативные помехи в дополнение к канальным аддитивным шумам [Колосов и др., 1969; Иванов и др., 2015; Гуляев и Стрелков, 2006; Гинзбург, 1960; Кутуза и др., 2015; Арманд, 2003; Назаров и Батанов, 2016; Назаров и др., 2017; Dvorak and Dudle, 1995]. Искажения комплексных огибающих сигналов и интерференционные помехи снижают надежность передачи информации по рассматриваемым радиолиниям и снижают точность оцениваемых параметров сигналов радиолокационных систем [Скляр, 2003; Колосов и др., 1969; Иванов и др., 2015; Гинзбург, 1960; Назаров и др., 2016].
Интерференционные помехи представляют случайный и в общем случае нестационарный процесс, статистические характеристики которого (частотная полоса, мощность, спектральная плотность мощности, др.) зависят от параметров ионосферной радиолинии, от центральной частоты, от частотной полосы сигналов и их информационного содержания [Назаров и Батанов, 2017]. При расширении частотной полосы сигналов и при уменьшении их центральной частоты искажающее влияние земной ионосферы увеличивается (в частности, для частот P диапазона), разрушая при определенных условиях нормальное функционирование информационных спутниковых систем [Скляр, 2003; Назаров и Батанов, 2017].
Для рассматриваемых радиолиний предложены алгоритмы обработки сигналов при приеме с целью компенсации их искажений [Батанов и Назаров, 2020; Батанов и Назаров, 2021]. Эти алгоритмы основаны на использовании пилот-сигналов, которые включаются в сигнальный поток и используются для идентификации радиолинии. Данный подход исследован для простых цифровых сигналов с двоичной фазовой манипуляцией (ФМ2 сигналы) и показана возможность практически полной компенсации их искажений [Батанов и Назаров, 2021].
Актуальными являются проблемы определения условий корректной работы рассматриваемых алгоритмов обработки, а также моделирования данных алгоритмов для классов цифровых сигналов, широко используемых в спутниковых информационных системах сигналов и более эффективных по отношению к ФМ2 сигналам.
2. ПОСТАНОВКА ЗАДАЧИ
Содержание данного пункта относительно использования приближения геометрической оптики к точному решению волнового уравнения, а также приведенное ниже описание базовой модели распространения сигналов по спутниковым ионосферным радиолиниям и искажений сигналов даны в работах [Яковлев и др., 2009; Назаров и Батанов, 2016; Назаров и др., 2017; Батанов и Назаров, 2020; Батанов и Назаров, 2021]. Для логичного и более удобного изложения для чтения ниже приводятся основные результаты этих работ.
Распространение сигналов по физическим радиолиниям определяется решением волнового уравнения относительно электрического поля $\vec {E}(\vec {r},f)$ плоской волны с частотой $f$ [Яковлев и др., 2009; Дэвис, 1973; Крюковский и др., 2012]. При нормальном падении плоской волны на изотропную непоглощающую среду с диэлектрической проницаемостью ${\varepsilon (z,f)}$ и при распространении по оси $z$ волновое уравнение имеет скалярный вид [Гинзбург, 1960]
(1)
${\frac{{{{d}^{2}}E(z,f)}}{{d{{z}^{2}}}} + \frac{{{{{(2\pi )}}^{2}}{{f}^{2}}}}{{{{c}^{2}}}}\varepsilon (z,f)E(z,f) = 0}.$При условии ${\frac{{d\varepsilon (z,f)}}{{dz}}\lambda \ll 1}$ решение (1) задается приближением геометрической оптики [Гинзбург, 1960]
(2)
${E(z,f) = \operatorname{Re} \left( {E(0,f)\exp \left( { - \frac{{j2\pi f}}{c}\int\limits_0^z {n(x,f){\kern 1pt} dx} } \right)} \right)}{\kern 1pt} .$Для широкополосных цифровых сигналов $s(t)$ решение уравнения (1) является более сложным. В этом случае данные сигналы представляются в частотной области множеством спектральных компонент, которые при распространении приобретают частные фазовые и амплитудные смещения за счет дисперсионных и поглощающих свойств ионосферы. Это порождает искажения комплексных огибающих сигналов на входе приемных устройств и возникновение интерференционных помех [Скляр, 2003; Спилкер, 1979]. Мощность этих помех определяется мощностью передаваемых сигналов $s(t)$, поэтому путем ее повышения невозможно снизить влияние искажений при приеме сигналов $s(t)$ [Скляр, 2003].
Разработанные алгоритмы обработки широкополосных цифровых сигналов, снижающие эффективность интерференционных помех, основаны на использовании монохроматических пилот-сигналов с различными центральными частотами [Скляр, 2003; Батанов и Назаров, 2020]. Известно развитие этого подхода – предложено использовать пилот-сигналы, совпадающие по структуре с информационными цифровыми сигналами, что упрощает реализацию метода компенсации искажений [Батанов и Назаров, 2021]. Суть данных алгоритмов – идентификация радиолинии (оценивание ее параметров) на основе обработки пилот-сигналов и компенсация искажающего влияния земной ионосферы с использованием этой информации [Колосов и др., 1969; Яковлев и др., 2009; Долуханов, 1960].
Вместе с тем открытой является проблема относительно условий корректности применения данных алгоритмов компенсации с учетом отмеченного нестационарного поведения земной ионосферы, а также проблема исследования и моделирования данных алгоритмов обработки при приеме цифровых сигналов с многоуровневой фазовой манипуляцией, альтернативных рассмотренным ФМ2 сигналам относительно частотной эффективности, но более подверженных искажающему влиянию земной ионосферы.
3. МОДЕЛЬ РАСПРОСТРАНЕНИЯ СИГНАЛОВ ПО СПУТНИКОВЫМ ИОНОСФЕРНЫМ РАДИОЛИНИЯМ
Рассматриваемая модель ионосферной радиолинии соответствует сферически-симметричной изотропной среде с неоднородной диэлектрической проницаемостью $\varepsilon (z,f)$ [Гинзбург, 1960; Яковлев и др., 2009; Дэвис, 1973]
(3)
${\varepsilon (z,f) = 1 - {{f_{p}^{2}(z)} \mathord{\left/ {\vphantom {{f_{p}^{2}(z)} {{{f}^{2}}}}} \right. \kern-0em} {{{f}^{2}}}}}.$Для ${f > {{f}_{p}}(z)}$ соотношение (3) определяет вещественные значения $\varepsilon (z,f)$, т.е. поглощение радиоволн отсутствует и рассматриваются лишь фазо-частотные искажения комплексных огибающих сигналов при распространении.
Для профиля электронной плотности ${{{N}_{{\text{э}}}}(z)}$ известен ряд моделей, одной из используемых является однослойная модель [Долуханов, 1960; Bilitza et al., 2011]
(4)
${{{N}_{э}}(z) = \sqrt {\gamma \exp [ - {\kern 1pt} (\exp (b(z - {{z}_{{\text{м}}}})) + bz)]} }{\kern 1pt} .$Ионосферные спутниковые радиолинии представляются линейным фильтром. Искаженные сигналы ${\hat {s}(t)}$ в этом случае описываются оператором свертки во временной области либо как результат линейной фильтрации передаваемых сигналов ${s(t)}$ [Гинзбург, 1960; Назаров и др., 2016; Dvorak and Dudley, 1995]
(5)
${\hat {s}(t) = \int\limits_{ - \infty }^\infty {\dot {S}(f)\dot {H}(z,f)\exp \left( { - j2\pi ft} \right)df} }.$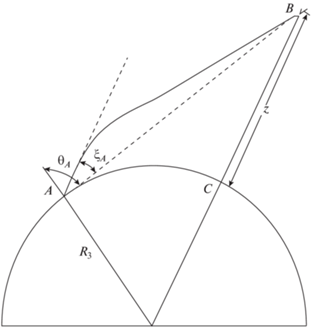
Время $\tau (z,f)$ задается известным соотношением [Яковлев и др., 2009]
(6)
$\begin{gathered} \tau (z,f) = \\ = {\kern 1pt} {\kern 1pt} \int\limits_0^z {\frac{{n(x,f)({{R}_{{\text{З}}}} + x)dx}}{{c(x,f)\sqrt {{{n}^{2}}(x,f){{{({{R}_{{\text{З}}}}{\kern 1pt} {\kern 1pt} + {\kern 1pt} {\kern 1pt} x)}}^{2}}{\kern 1pt} {\kern 1pt} - {\kern 1pt} {\kern 1pt} {{{(n(0,f){\kern 1pt} {{R}_{{\text{З}}}}{\kern 1pt} \sin ({{\theta }_{A}}{\kern 1pt} {\kern 1pt} - {\kern 1pt} {\kern 1pt} {{\xi }_{A}}))}}^{2}}} }}} \\ \end{gathered} .$Приближенное выражение для $\tau (z,f)$ получается при упрощающем условии сравнительно быстрого снижения электронной плотности от ее максимального значения ${{{N}_{{\text{м}}}}}$ (вверх и вниз) и без учета параметра ${{{\xi }_{А}}}$ вследствие его малого значения [Колосов и др., 1969]
(7)
$\begin{gathered} \tau (z,f) = \frac{{4.03 \times {{{10}}^{7}}}}{{{{f}^{2}}}} \times \\ \times \,\,\frac{{({{R}_{{\text{З}}}} + {{z}_{{\text{м}}}})}}{{\sqrt {{{{({{R}_{{\text{З}}}} + {{z}_{{\text{м}}}})}}^{2}} - {{{({{R}_{{\text{З}}}}\sin {{\theta }_{A}})}}^{2}}} }}\int\limits_0^z {{{N}_{{\text{э}}}}(x)dx} . \\ \end{gathered} $Интегрирование в (7) производится по линии CB (рис. 1).
Вид искаженного сигнала ${\hat {s}(t)}$ определяется вычислением (5) для значений коэффициента передачи ${\dot {H}(z,f)}$ в частотном диапазоне сигналов ${\Delta F}$.
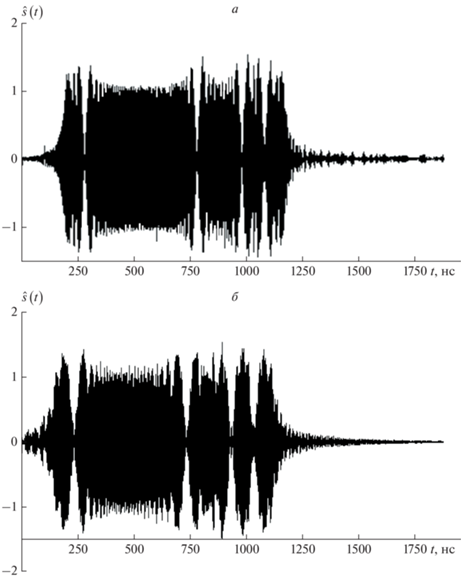
На рис. 2 приведен фрагмент сигнала ${\hat {s}(t)}$ в виде последовательности радиоимпульсов с огибающей в виде меандра, центральная частота ${{f}_{0}} = 400$ МГц (P частотный диапазон), длительность $T = 100$ нс (частотная полоса $\Delta F = 20$ МГц), зенитный угол ${{{\theta }_{A}}}\,\, = 0$ и ${{\theta }_{A}} = 60^\circ $ [Батанов и Назаров, 2021]. По оси абсцисс отложено время относительно распространения в свободном пространстве. Видны вариации (искажения) комплексной огибающей, временное рассеяние составляющих радиоимпульсов, определяющее интерференционные помехи, и временная задержка относительно распространения в свободном пространстве.
4. ФАЗО-РАЗНОСТНЫЙ АЛГОРИТМ КОМПЕНСАЦИИ ИСКАЖЕНИЙ
Для компенсации интерференционных помех формируется фильтр с комплексным коэффициентом передачи ${{\dot {H}}^{{ - 1}}}(z,f) = \exp \left( { - j\varphi {(z,f)}} \right)$, инверсный к фильтру ионосферной радиолинии. Результирующий сигнал ${{s}_{r}}(t)$ с компенсацией искажающего действия ионосферы вычисляется с использованием соотношения
(8)
${{{s}_{r}}(t) = \int\limits_{ - \infty }^\infty {\dot {Y}(f)\exp \left( { - j\varphi {(z,f)}} \right)\exp \left( {j2\pi f} \right)df} }.$Фазовая характеристика $\varphi {(z,f)}$ задается соотношением
(9)
$\varphi (z,f) = \frac{{2\pi }}{f}\frac{{\Delta \tau (z,{{f}_{1}},{{f}_{2}})}}{{\left( {\frac{1}{{f_{1}^{2}}} - \frac{1}{{f_{2}^{2}}}} \right)}},$Оценка значений $\Delta \tau (z,{{f}_{1}},{{f}_{2}})$ производится на основе вычисления корреляционных соотношений [Скляр, 2003; Батанов и Назаров, 2020; Батанов и Назаров, 2021]
(10)
$\Delta \tau (z,{{f}_{1}}) = \mathop {\max }\limits_\tau \left| {\int\limits_0^T {\dot {y}(t + \tau )\dot {s}_{1}^{*}(t)dt} } \right|,$(11)
$\Delta \tau (z,{{f}_{2}}) = \mathop {\max }\limits_\tau \left| {\int\limits_0^T {\dot {y}(t + \tau )\dot {s}_{2}^{*}(t)dt} } \right|.$Сигналы ${{\dot {s}}_{1}}(t)$ и ${{\dot {s}}_{2}}(t)$, используемые при вычислении (10), (11) в приемном устройстве, формируются на основе пилот-сигнала ${{\dot {s}}_{{\text{п}}}}(t)$, структура которого (частотная полоса, огибающая, тип манипуляции) совпадает со структурой используемых информационных сигналов $\dot {s}(t)$. Это упрощает реализацию данного направления по отношению к пилот-сигналам в виде монохроматических сигналов с частотами ${{f}_{1}}$, ${{f}_{2}}$ на интервале времени анализа.
Метод формирования ${{\dot {s}}_{1}}(t)$ и ${{\dot {s}}_{2}}(t)$ приведен в работе [Батанов и Назаров, 2021] и заключается в следующем. Вычисляется спектр ${{\dot {F}}_{{\text{п}}}}(f)$ сигнала ${{\dot {s}}_{{\text{п}}}}(t)$, который представляется в виде двух непересекающихся множеств спектральных составляющих ${{\dot {F}}_{{\text{1}}}}(f),{{\dot {F}}_{{\text{2}}}}(f)$ с равными энергиями. Обратные спектральные преобразования над ${{\dot {F}}_{{\text{1}}}}(f)$ и ${{\dot {F}}_{{\text{2}}}}(f)$ задают соответствующие сигналы ${{\dot {s}}_{1}}(t)$ и ${{\dot {s}}_{2}}(t)$. Следует отметить выполнение тождества ${{\dot {s}}_{{\text{п}}}}(t)$ = $ = {{\dot {s}}_{1}}(t) + {{\dot {s}}_{2}}(t)$ [Варакин, 1985].
Значение центральной частоты ${{f}_{{\text{1}}}}$ для множества спектральных составляющих ${{\dot {F}}_{{\text{1}}}}(f)$ вычисляется с использованием соотношения
(12)
${{f}_{1}} = {{\sum\limits_{i{\kern 1pt} \in {\kern 1pt} {{F}_{1}}(f)} {i\Delta {\kern 1pt} fA_{i}^{2}} } \mathord{\left/ {\vphantom {{\sum\limits_{i{\kern 1pt} \in {\kern 1pt} {{F}_{1}}(f)} {i\Delta {\kern 1pt} fA_{i}^{2}} } {\sum\limits_{i{\kern 1pt} \in {\kern 1pt} {{F}_{1}}(f)} {A_{i}^{2}} }}} \right. \kern-0em} {\sum\limits_{i{\kern 1pt} \in {\kern 1pt} {{F}_{1}}(f)} {A_{i}^{2}} }}{\kern 1pt} .$5. РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ
Одной из основных характеристик систем передачи информации является вероятность ошибки ${{P}_{{\text{с}}}}$ при приеме сигнальных символов [Скляр, 2003]. При наличии канального аддитивного белого гауссовского шума (АБГШ) оптимальный прием основан на вычислении взаимной корреляции входной реализации $r(t) = \hat {s}(t) + n(t)$ с множеством составляющих радиоимпульсов и принятии решения относительно переданного сигнального символа, соответствующего максимальному значению в множестве корреляций [Скляр, 2003; Прокис, 2000].
Ниже рассматриваются сигналы $s(t)$ на основе 16-ти позиционной фазовой манипуляции (ФМ16 сигналы), используемые в спутниковых информационных системах [Прокис, 2000]. Сигналы $s(t)$ представляют последовательность фазоманипулированных радиоимпульсов ${{s}_{i}}(t,{{\varphi }_{{il}}}) = Au(t + iT) \times $ $ \times \,\,\exp (j({{\varphi }_{{il}}} + 2\pi ft))$ длительностью $T$ [Прокис, 2000]. Здесь $u(t + iT) = 1$ при $iT \leqslant t < i(t + iT)$, иначе $u(t + iT) = 0$; $A,{{\varphi }_{{il}}}$ – амплитуда и фаза, задаваемая для значения $i$ правилом ${{\varphi }_{{il}}} = {{\pi l} \mathord{\left/ {\vphantom {{\pi l} {16}}} \right. \kern-0em} {16}}$, $l = 0,1,...,15$.
Рассматриваемые сигналы обладают существенно большей частотной эффективностью по отношению к ФМ2 сигналам – при эквивалентной частотной полосе ФМ16 сигналы обеспечивают скорость передачи в 4 раза превышающую скорость передачи с использованием ФМ2 сигналов. Вместе с тем ФМ16 сигналы значительно более подвержены искажающему влиянию земной ионосферы.
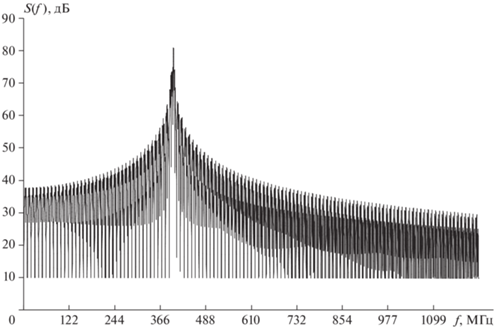
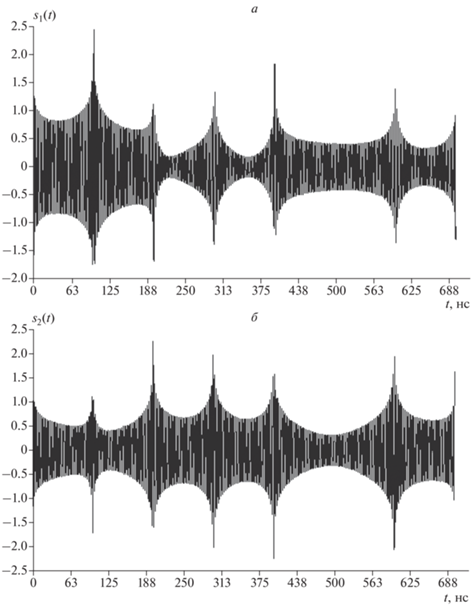
На рисунке 3 приведен вид спектральной плотности мощности используемых при моделировании алгоритма компенсации широкополосного пилот-сигнала на основе ФМ16 сигналов, длительность $T = 100$ нс (частотная полоса $\Delta F = 20$ МГц), количество составляющих сигналов в составе пилот-сигналов 7, центральная частота ${{f}_{0}} = 400$ МГц. На рисунке 4 приведен вид сигналов ${{s}_{1}}(t)$ и ${{s}_{2}}(t)$, которые сформированы с использованием приведенного выше метода на основе непересекающихся множеств спектральных компонент $\left| {{{{\dot {F}}}_{1}}(f)} \right| < 400$ МГц и $\left| {{{{\dot {F}}}_{{\text{2}}}}(f)} \right| > {\text{400}}$ МГц. Соответствующие значения центральных частот равны${{f}_{1}} = 389.77$ МГц и ${{f}_{2}} = 404.10$ МГц.
Моделирование алгоритма компенсации интерференционных помех выполнено с целью оценивания деградации вероятности Рс при приеме сигналов ${\hat {s}(t)}$ относительно распространения в свободном пространстве и эффективности алгоритма компенсации интерференционных помех. Характеристики ионосферной радиолинии – однослойная модель (4) с параметрами дневной ионосферы , высота ${z = 400}$ км, центральная частота ${{f}_{{\text{0}}}} = {\text{400}}$ МГц, зенитный угол ${{{\theta }_{A}} = 60}^\circ $ [Батанов и Назаров, 2020; Батанов и Назаров, 2021].
На рисунке 5 (кривые 1–3) приведены вероятности Рс при наличии АБГШ. По оси абсцисс отложены значения сигнал/помеха ${{{{E}_{{\text{б}}}}} \mathord{\left/ {\vphantom {{{{E}_{{\text{б}}}}} {{{N}_{0}}}}} \right. \kern-0em} {{{N}_{0}}}}$; ${{N}_{0}}$ – односторонняя спектральная плотность АБГШ; ${{E}_{{\text{б}}}}$ – энергия сигналов на бит.
Рис. 5.
Вероятности ошибочного приема сигналов ФМ16 при распространении по ионосферной линии, ${{{\theta }_{A}} = 60}^\circ $: 1 – распространение в свободном пространстве; 2 – распространение по ионосферной радиолинии, ${T = 200}$ нс, $\Delta {F = 10}$ МГц; 3 – распространение по радиолинии, ${T = 100}$ нс, $\Delta {F = 20}$ МГц.
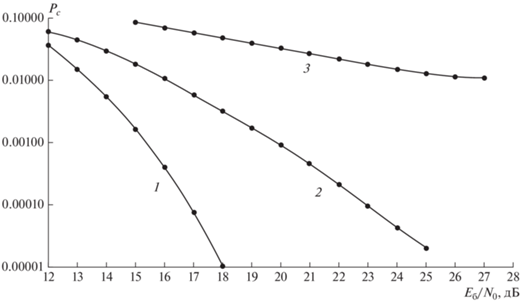
Кривая 1 соответствует теоретической кривой вероятности ошибки на символ Рс при распространении сигналов в свободном пространстве. Данная кривая вычислена с использованием соотношения, определяющего вероятность Рс для сигналов с многопозиционной фазовой манипуляцией [Прокис, 2000]
(13)
${{P}_{c}} = \sqrt {\frac{2}{\pi }} \int\limits_{\sqrt {{{2k{{E}_{{\text{б}}}}} \mathord{\left/ {\vphantom {{2k{{E}_{{\text{б}}}}} {{{N}_{0}}}}} \right. \kern-0em} {{{N}_{0}}}}} \sin ({\pi \mathord{\left/ {\vphantom {\pi M}} \right. \kern-0em} M})}^\infty {\exp ({{ - {{x}^{2}}} \mathord{\left/ {\vphantom {{ - {{x}^{2}}} 2}} \right. \kern-0em} 2})} {\kern 1pt} dx.$Кривая 2 соответствует распространению сигналов по ионосферной радиолинии, длительность радиоимпульсов ${T = {\text{200}}}$ нс, частотная полоса $\Delta {F = 10}$ МГц. Энергетический проигрыш по отношению к распространению в свободном пространстве для Рс = 0.0001 достигает 6 дБ.
При увеличении частотной полосы сигналов по отношению к рассмотренной полосе 10 МГц энергетические потери возрастают. Кривая 3 соответствует распространению сигналов с расширением полосы до $\Delta {F = 20}$ МГц (длительность радиоимпульсов ${T = {\text{100}}}$ нс). В этом случае при увеличении параметра ${{{{E}_{{\text{б}}}}} \mathord{\left/ {\vphantom {{{{E}_{{\text{б}}}}} {{{N}_{0}}}}} \right. \kern-0em} {{{N}_{0}}}}$ вероятность ошибочного приема практически не изменяется (Рс > > 0.01). Это показывает разрушение нормальной работы информационной системы за счет превышения мощности интерференционных помех по отношению к мощности АБГШ.
Сигналы ${{\dot {s}}_{1}}(t)$ и ${{\dot {s}}_{2}}(t)$, используемые для вычисления обратного фильтра ${{{{\dot {H}}}^{{ - 1}}}(z,f)}$, формировались на основе пилот-сигнала ${{\dot {s}}_{{\text{п}}}}(t)$ в виде последовательности элементарных фазоманипулированных радиоимпульсов ${{s}_{i}}(t,{{\varphi }_{{il}}})$, вид сигналов ${{s}_{1}}(t)$ и ${{s}_{2}}(t)$ приведен на рис. 4.
Период включения $T$ пилот-сигналов в сигнальный поток определяется параметром радиолинии – ее временем стационарности ${{\tau }_{{st}}}$. Значение $T$ должно удовлетворять условию $T < {{\tau }_{{st,\min }}}$. Оценивание минимального значения времени стационарности ${{\tau }_{{st,\min }}}$ выполняется с использованием соотношения ${{\tau }_{{st,\min }}} < {{2{{r}_{1}}} \mathord{\left/ {\vphantom {{2{{r}_{1}}} {{{V}_{{\max }}}}}} \right. \kern-0em} {{{V}_{{\max }}}}}$, ${{V}_{{\max }}}$ – максимальная скорость движения ионосферы (до 500 м/с [Колосов и др., 1969; Яковлев и др., 2009]); ${{r}_{1}} = \sqrt {\lambda h} $ – радиус первой зоны Френеля от F-области ионосферы до приемного устройства ($h \approx 300$ км [Яковлев и др., 2009]); $\lambda $ – длина волны. Для P-частотного диапазона $\lambda \approx 0.75$ м и ${{\tau }_{{st,\min }}} < 1.9$ с. Обоснование соотношения относительно ${{\tau }_{{st,\min }}}$ заключается в рассмотрении существенной области ионосферы, примыкающей к трассе распространения сигналов и определяющей основной вклад в их искажения [Яковлев и др., 2009]. Эта область эквивалентна первой зоне Френеля с радиусом ${{r}_{1}}$, минимальное время прохождения ионосферы данной зоны задается параметром ${{\tau }_{{st,\min }}}$.
Моделирование показало, что при использовании приведенных алгоритмов (8)–(11) компенсации интерференционных помех на основе рассматриваемых пилот-сигналов для радиолиний энергетические потери незначительны – для анализируемых значений сигнал/помеха ${{{{E}_{{\text{б}}}}} \mathord{\left/ {\vphantom {{{{E}_{{\text{б}}}}} {{{N}_{{\text{0}}}}}}} \right. \kern-0em} {{{N}_{{\text{0}}}}}}$ соответствующие вероятностные кривые практически совпадают с вероятностной кривой 1 для распространения сигналов в свободном пространстве.
Приведенные результаты показывают эффективность исследуемого алгоритма компенсации искажений широкополосных сигналов при их распространении по ионосферным спутниковым радиолиниям.
6. ВЫВОДЫ
В статье приведено описание распространения сигналов по спутниковым ионосферным радиолиниям. При распространении по данным радиолиниям порождаются искажения комплексных огибающих цифровых сигналов при расширении их частотной полосы за счет дисперсионных свойств земной ионосферы. Это обусловливает возникновение интерференционных мультипликативных помех в дополнение к канальному аддитивному шуму, снижающих качество работы спутниковых информационных систем и разрушая при определенном состоянии спутниковых радиолиний их штатное функционирование.
Особенностью интерференционных помех по отношению к аддитивным шумам является невозможность снижения их искажающего влияния путем повышения мощности передаваемых сигналов [Скляр, 2003].
Приведено описание модели искажений цифровых сигналов при их распространении по рассматриваемым радиолиниям. Основу модели составляет концепция действия радиолиний, эквивалентного линейной фильтрации.
Приведено описание алгоритма компенсации данных искажений путем формирования фильтра, инверсного к фильтру ионосферной радиолинии [Батанов и Назаров, 2020; Батанов и Назаров, 2021]. Параметры инверсного фильтра вычисляются путем обработки в приемном устройстве сигналов, формируемых на основе пилот-сигналов, и идентификации радиолинии с использованием результатов обработки. Полезным свойством рассматриваемых пилот-сигналов является совпадение их структуры со структурой информационных цифровых сигналов. Определено условие корректной работы алгоритма компенсации искажений с учетом нестационарного поведения земной ионосферы – дано оценочное значение периода включения пилот-сигналов в сигнальный поток, который определяется временем стационарности радиолинии, одним из важных ее параметров.
Приведены результаты моделирования рассматриваемого алгоритма обработки при приеме широкополосных цифровых ФМ16 сигналов, более эффективных, чем ФМ2 сигналы [Батанов и Назаров, 2021] относительно частотной эффективности, но значительно сильнее подверженных искажающему влиянию земной ионосферы. Показана возможность компенсации искажений для ФМ16 сигналов при их распространении по рассматриваемым радиолиниям и достижения вероятностных характеристик ошибочного приема, практически совпадающих с характеристиками при распространении в свободном пространстве.
Список литературы
– Арманд Н.А. Распространение широкополосных сигналов в дисперсионных средах // Радиотехника и электроника. Т. 48. № 9. С. 1045–1057. 2003.
– Батанов В.В., Назаров Л.Е. Алгоритм приема широкополосных сигналов при распространении по трансионосферным линиям // Физические основы приборостроения. Т. 9. № 4(38). С. 24–29. 2020.
– Батанов В.В., Назаров Л.Е. Алгоритмы компенсации искажений сигналов при распространении по спутниковым ионосферным радиолиниям // Журн. радиоэлектроники. № 6. URL: http://jre.cplire.ru/jre/jun21/1/ text.pdf. 2021.
– Варакин Л.Е. Системы связи с шумоподобными сигналами. М.: Радио и связь, 384 с. 1985.
– Гинзбург В.Л. Распространение электромагнитных волн в плазме. М.: Наука, 552 с. 1960.
– Гуляев Ю.В., Стрелков Г.М. Распространение сверхширокополосного радиоимпульса в холодной плазме // Докл. Академии наук. Т. 408. № 6. С. 754–757. 2006.
– Долуханов М.П. Распространение радиоволн. М.: Гос. Изд. по вопросам связи и радио, 392 с. 1960.
– Дэвис К. Радиоволны в ионосфере. М.: Мир, 502 с. 1973.
– Иванов Д.В., Иванов В.А., Михеева Н.Н., Рябов Н.В., Рябова М.И. Распространение коротковолновых сигналов с расширенным спектром в среде с нелинейной дисперсией // Радиотехника и электроника. Т. 60. № 11. С. 1167–1177. 2015.
– Колосов М.А., Арманд Н.А., Яковлев О.И. Распространение радиоволн при космической связи. М.: Связь, 156 с. 1969.
– Крюковский А.С., Лукин Д.С., Кирьянова К.С. Метод расширенной бихарактеристической системы при моделировании распространения радиоволн в ионосферной плазме // Радиотехника и электроника. Т. 57. № 9. С. 1028–1034. 2012.
– Кутуза Б.Г., Мошков А. В., Пожидаев В. Н. Комбинированный метод, который устраняет влияние ионосферы при обработке сигналов бортовых радиолокаторов Р-диапазона с синтезированной апертурой // Радиотехника и электроника. Т. 60. № 9. С. 889–895. 2015.
– Назаров Л.Е., Батанов В.В. Анализ искажений радиоимпульсов при распространении по ионосферным линиям передачи спутниковых систем связи // Электромагнитные волны и электронные системы. Т. 21. № 5. С. 37–45. 2016.
– Назаров Л.Е., Батанов В.В., Данилович Н.И. Анализ искажений сигналов с фазовой манипуляцией при распространении по ионосферным спутниковым линиям передачи // Антенны. № 12. С. 17–24. 2017.
– Назаров Л.Е., Батанов В.В., Зудилин А.С. Искажения радиоимпульсов при распространении по ионосферным линиям спутниковых систем связи // Журн. радиоэлектроники. № 2. URL: http://jre.cplire.ru/jre/ feb16/1/text.pdf. 2016.
– Назаров Л.Е., Батанов В.В. Вероятностные характеристики обнаружения радиоимпульсов при распространении по ионосферным линиям передачи спутниковых систем связи // Радиотехника и электроника. Т. 62. № 9. С. 866–874. 2017.
– Прокис Дж. Цифровая связь. Пер. с англ. М.: Радио и связь, 798 с. 2000.
– Скляр Б. Цифровая связь. Теоретические основы и практическое применение. Пер. с англ. М.: Издательский дом “Вильямс”, 1104 с. 2003.
– Спилкер Дж. Цифровая спутниковая связь. Пер. с англ. М.: Связь, 592 с. 1979.
– Яковлев О.И., Якубов В.П., Урядов В.П., Павельев А.Г. Распространение радиоволн. М.: ЛЕНАНД, 496 с. 2009.
– Bilitza D., McKinnell L.-A., Reinisch B., Fuller-Rowell T. The International Reference Ionosphere (IRI) today and in the future // J. Geodesy. V. 85. P. 909–920. 2011.
– Dvorak S.L., Dudley D.G. Propagation of Ultra-wide-band electromagnetic pulses through dispersive media // IEEE T. Electromagn. C. V. 37. № 2. P. 192–200. 1995.
Дополнительные материалы отсутствуют.
Инструменты
Геомагнетизм и аэрономия