

Астрономический вестник, 2023, T. 57, № 4, стр. 342-356
Лидар для исследования атмосферы Марса с поверхности
А. Н. Липатов a, *, А. Н. Ляш a, **, А. П. Экономов a, В. С. Макаров a, В. А. Лесных a, В. А. Горетов a, Г. В. Захаркин a, Л. И. Хлюстова a, С. А. Антоненко a, Д. С. Родионов a, О. И. Кораблев a
a Институт космических исследований Российской академии наук (ИКИ РАН)
Москва, Россия
* E-mail: slip@iki.rssi.ru
** E-mail: alyash@iki.rssi.ru
Поступила в редакцию 16.03.2023
После доработки 21.03.2023
Принята к публикации 24.04.2023
- EDN: REWIMK
- DOI: 10.31857/S0320930X23040096
Аннотация
Прибор Лидар в составе метеорологического комплекса Посадочной платформы ЭкзоМарс-2022 предназначен для исследования марсианского аэрозоля, пограничного слоя, и мелкомасштабной атмосферной турбулентности. Миниатюрный лидар на основе импульсного полупроводникового лазера и лавинного фотодиода в режиме счета фотонов позволит получать профили обратного рассеяния аэрозоля на вертикальной трассе от 10 до 1500 м днем и от 15 до 10 000 м ночью. В пассивном режиме яркость неба измеряется в узком спектральном диапазоне и в узком телесном угле с частотой до сотен герц. Измеряемые флуктуации могут дать информацию о турбулентности дневной атмосферы и ее связи с пылевой активностью. В статье рассмотрены научные задачи эксперимента, программа измерений на поверхности Марса и подробно описаны составные части аппаратуры и особенности их работы.
ВВЕДЕНИЕ
Лидар (LIDAR, Light Detection And Ranging) – оптический прибор для измерения расстояния до объекта и/или для исследования зависимости коэффициента рассеяния или отражения среды вдоль трассы зондирования (Measures, 1984). В качестве передатчика в приборах используется импульсный или модулируемый лазер, а в приемной части – чувствительный детектор с возможностью регистрации временной формы отраженного сигнала. Полезной информацией являются время задержки и амплитуда отраженного от препятствия или рассеянного средой зондирующего излучения. В более развитых лидарных системах используются несколько длин волн зондирования и усложненные многоканальные оптические устройства приема, что позволяют различать спектральные и поляризационные свойства отраженного излучения. Это дает дополнительную информацию о плотности, газовом составе атмосферы, профиле ветра, распределении температур и других физических свойств среды вдоль трассы зондирования.
Для исследования Марса лидары применялись дважды. Прибор Mars Orbiter Laser Altimeter (MOLA) на КА Mars Globa Surveyor (MGS; NASA, 1996–2006 гг.) (Zuber, 1992) состоял из Nd:YAG лазера (1064 нм) и приемного телескопа диаметром 50 см с лавинным фотодиодом в качестве детектора. По данным MOLA выполнена глобальная альтиметрия Марса (Smith и др., 1998; 1999), в частности, было впервые выяснено, что северное полушарие Марса ниже южного относительно экваториальной плоскости. Приемная часть MOLA не была предназначена для исследования обратного рассеяния атмосферой, тем не менее удалось получить данные об облаках и дымках (Ivanov, Muhlemann, 1998).
Лидар для исследования атмосферы с поверхности, входивший в состав метеокомплекса посадочного аппарата Phoenix (NASA, 2007–2008 гг.) также работал на импульсном Nd:YAG лазере на двух длинах волн (1064 и 532 нм). Приемная часть включала телескоп с входным зрачком 10 см и два детектора: лавинный фотодиод для канала 1064 нм и фотоумножитель для 532 нм. В зависимости от содержания аэрозоля, этот прибор позволял зондировать атмосферу до высот 15 км (Whiteway и др., 2008). При помощи лидара Phoenix полярная атмосфера Марса исследовалась в течение пяти месяцев в сезон северного лета. Место посадки находилось на северной широте 68.22°. В течение этого периода (Ls 97°–150°) развивалась и затухала сублимация северной полярной шапки, и в эксперименте, помимо пыли, удалось наблюдать особенности водяного атмосферного цикла, формирование конденсационных облаков, осадки и др. (Whiteway и др., 2009). Данные эксперимента о планетном пограничном слое, пыли и конденсационных облаках продолжают широко использоваться (см., например, Hinson и др., 2022; Tamppari, Lemmon, 2020; Moores и др., 2011; Daerden и др., 2010; 2015).
В данной работе представлен миниатюрный лидар на основе полупроводникового импульсного лазера для решения атмосферных задач со стационарной посадочной платформы ЭкзоМарс-2022 (Vago и др., 2015a). Прототипом устройства послужил лидар (Arumov и др., 1999; Bukharin и др., 1998; Линкин и др., 2004), разработанный в Институте космических исследований (ИКИ) РАН под руководством В.М. Линкина для проекта NASA Mars Polar Lander (MPL или Mars Surveyor 98 Lander). Основой этой разработки, в свою очередь, был портативный лидар для контроля окружающей среды (Pershin и др., 1992; 1993; Pershin, 1995). Посадка MPL в 1999 г. в южной полярной области Марса завершилась неудачей. Для следующей версии полярной платформы NASA Phoenix был выбран метеорологический комплекс Канадского космического агентства (ASC), включающий лидар большей размерности (Whiteway и др., 2008). Российский прибор был исключен.
Прибор Лидар входит в состав метеорологического комплекса (МТК) посадочной платформы ЭкзоМарс-2022 и имеет аббревиатуру БДА МТК. Летный образец прибора изготовлен, испытан и откалиброван в ИКИ РАН и с ноября 2019 г. находится на предприятии-изготовителе космического аппарата. В статье рассмотрены научные задачи эксперимента, программа измерений на поверхности Марса и подробно описаны составные части аппаратуры и особенности работы прибора.
НАУЧНЫЕ ЗАДАЧИ
Основные научные задачи, решаемые с помощью лидара, следующие: измерение оптических свойств атмосферного аэрозоля Марса, плотности облачного слоя, обнаружение и детализация тонкой структуры облачных слоев и дымок приземного слоя атмосферы. Прибор такого рода предполагается применить в экваториальных широтах Марса (Vago и др., 2015b) впервые. Особенно ценные данные лидар обещает дать для исследования планетного пограничного слоя (Petrosyan и др., 2011; Read и др., 2017). Структура и динамика профилей, как пыли, так и конденсационных аэрозолей в приповерхностном слое, даст уникальную информацию об этой пока плохо изученной области атмосферы Марса (Daerden и др., 2010; Dickinson и др., 2010; 2011). Для понимания водного и пылевого циклов атмосферы Марса важно изучение структуры облачности на различных временных и пространственных масштабах, наблюдение суточной и сезонной динамики атмосферного аэрозоля (см., например, Daerden и др., 2015; Moores и др., 2011). Длительные регулярные наблюдения, возможно, позволят пролить свет на процессы в атмосфере при прохождении фронта пылевой бури. Регулярные измерения в течение суток при различных сезонах и погодных условиях позволят выяснить закономерности цикла водяного пара и минерального аэрозоля в приповерхностном планетном пограничном слое. Активное зондирование позволит существенно расширить высотный диапазон исследуемой атмосферы Марса.
Основной измеряемой величиной является коэффициент обратного рассеяния атмосферы. Его профиль измеряется на дальности от 10 м до 1.5 км днем или 10 км ночью с пространственным разрешением 7.5 или 15 м. Измерения коэффициента обратного рассеяния позволяют, при условии привлечения дополнительной информации, уточнить такие свойства аэрозоля, как размер, состав, форма и концентрация частиц (Davy и др., 2009; Komguem и др., 2013).
Кроме того, в пассивном режиме измерения фоновой засветки лидар может работать как прецизионный фотометр. При этом квазинепрерывно производятся измерения солнечного излучения, рассеянного атмосферой Марса, в узком спектральном диапазоне и в узком телесном угле (2 мрад). Частота таких измерений может быть задана вплоть до сотен герц, что позволит зарегистрировать флуктуации интенсивности, как правило, связанные с быстропротекающими нестационарными процессами в атмосфере. Данная опция на основе статистического анализа принимаемого сигнала и в сочетании с измерениями давления (также с высоким временным разрешением), возможно, позволит определить параметры турбулентности дневной атмосферы и выяснить ее связь с пылевой активностью (Kurgansky, 2018; Mason, Smith, 2021; Spiga, 2021).
Большой интерес представляет сопоставление лидарных данных с данными других приборов метеокомплекса и посадочной платформы в целом, в первую очередь, с измерениями давления, температуры, скорости и направления ветра. Особенности образования конденсационных облаков и параметры турбулентности можно будет проследить, сравнивая данные лидара с профилями температуры по данным Фурье-спектрометра теплового ИК-диапазона FAST на борту посадочной платформы. Отдельный интерес имеет связь лидарных данных с приборами, непрерывно измеряющими оптическую прозрачность атмосферы Марса (ODS, SIS) (Toledo и др., 2016; Arruego и др., 2017). С их помощью можно будет отслеживать временную динамику облачности в течение суток, вероятно, обнаружить связи с вертикальными ветровыми потоками. Данные приборов пылевого комплекса (ПК) посадочного аппарата (Zakharov и др., 2022), в частности, нефелометра MicroMED (Scaccabarozzi и др., 2018), позволят дополнить данные лидара в части свойств частиц марсианской пыли.
ХАРАКТЕРИСТИКИ И ОБЩАЯ СТРУКТУРА
Лидар реализован по бистатической схеме, т.е. его передающий и приемные тракты разделены. Разработка основана на использовании относительно маломощного лазерного излучателя с высокой частотой повторения зондирующих импульсов и фотодетектора, работающего в режиме счета фотонов. Вероятность регистрации слабого сигнала обратного рассеяния от единичного зондирующего импульса мала. Повышение регистрируемого уровня такого сигнала достигается накоплением единичных квантовых событий вплоть до получения необходимого соотношения сигнал/шум. Общая длительность накопления сигнала может составлять от нескольких секунд до десяти минут при частоте повторения зондирующих импульсов до нескольких килогерц. Основные характеристики лидара приведены в табл. 1; его общий вид и блок-схема – на рис. 1 и 2.
Таблица 1.
Основные характеристики Лидара
| Параметры | |
|---|---|
| Наименование параметра | Значение |
| Масса прибора | 450 г |
| Потребляемая мощность | 4 Вт |
| Габаритные размеры | 170 × 80 × 48 мм |
| Температурный диапазон | От минус 20°С до плюс 50°С |
| Диапазон измерений по дальности: | |
| Дневной | От 10 до 1500 м, разрешение 7.5 м |
| Ночной | От 15 до 10 000 м, разрешение 15 м |
| Пассивные измерения фона | Длительность 1 с, с частотой до 100 Гц |
| Тракт передатчика | |
| Лазер | Полупроводниковый лазерный диод FLC-905-50P-MJ (Frankfurt Laser Company) |
| Длина волны излучения | 905 нм |
| Спектральная ширина линии излучения (FWHM) | 8 нм |
| Длительность импульса | 15 нс |
| Частота повторения | 2.0 кГц |
| Расходимость пучка | 2 × 0.2 мрад |
| Энергия импульса | 0.45 мкДж |
| Приемный тракт | |
| Входная апертура | Диаметр 20 мм |
| Угол поля зрения | 2.5 × 0.3 мрад |
| Ширина полосы спектрального пропускания (FWHM) | 11 нм |
| Фотодетектор | Кремниевый лавинный фотодиод в режиме счета
фотонов, стробируемый SAP 500 T6 (Laser Components) |

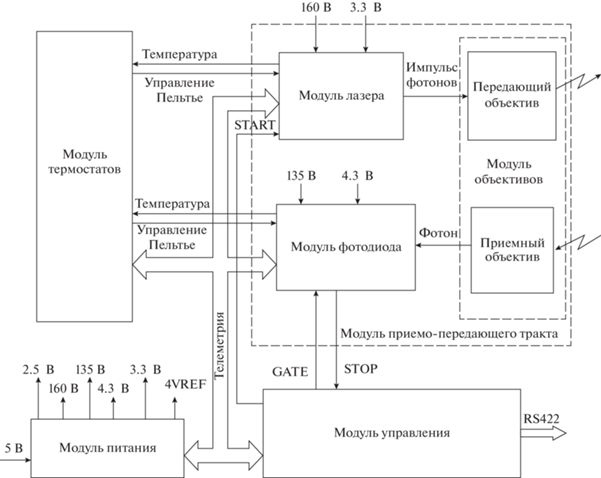
Лидар – блок датчиков аэрозоли метеорологического комплекса (БДА МТК) входит в состав посадочной платформы ЭкзоМарс-22. Прибор собран в виде моноблока. Электропитание (5 В), прием команд и передача научной и служебной информации осуществляются через блок датчиков верхней атмосферы метеорологического комплекса (БДВА МТК). Блок БДВА соединен с системами посадочной платформы через блок сбора научной информации и управления научной аппаратурой. Прибор включает следующие основные узлы: модуль приемо-передающего тракта, оптико-механический модуль с электроникой (с передающим и приемным объективами), модуль управления, модуль термостабилизации, модуль источника питания, модули лазера и фотодиода. Управление всеми узлами осуществляется модулем управления. Перечисленные модули подробно рассмотрены ниже.
МОДУЛЬ ОБЪЕКТИВОВ
Для максимальной эффективности работы лидара, в поле зрения приемного объектива, начиная с некоторого расстояния от прибора, должно полностью попадать пятно (сечение) лазерного пучка. Иными словами, угол зрения объектива должен быть больше или равен углу расходимости лазерного пучка. Одновременно, чем меньше угол зрения приемного объектива и больше размер приемной апертуры, тем выше соотношение сигнал/шум при работе прибора в условиях внешней, фоновой засветки.
Модуль объективов имеет передающий и приемный оптический тракты. Оптическая схема узла представлена на рис. 3.
Рис. 3.
Оптическая схема лидара: 1 – лазер, 2 – модуль лазерного излучателя, 3 – объективы передатчика и приемника, 4 – диафрагма 20 × 190 мкм приемного канала, 5 – интерференционный фильтр, 6 – защитное окно и отрезной светофильтр из цветного стекла, 7 – модуль фотодиода, 8 – фотодиод.
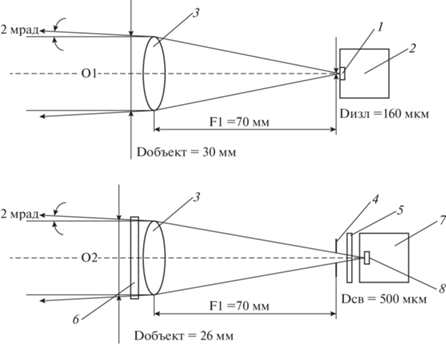
Оптическая схема собрана в едином корпусе, что обеспечивает высокую временную и температурную стабильность оптических характеристик модуля. Направление оптических осей О1 и О2 совпадает с точностью не хуже 0.1 мрад. В конструкции оптического узла предусмотрена взаимная юстировка передающего и принимающего объективов с целью обеспечения соосности объективов с точность ±0.1 мрад в двух взаимно ортогональных направлениях. Диаметры приемного и передающего объектива вместе с элементами конструкции составляет 30 мм для передающего объектива и 26 мм для приемного. Излучение лазера собирается передающим объективом в параллельный пучок с расходимостью порядка 2 мрад. В связи с тем, что лазерный диод имеет прямоугольную зону излучения 10 × 160 мкм (пятно излучения в дальней зоне имеет вид сильно вытянутого эллипса), в приемном тракте близко к фокальной плоскости установлена щелевая диафрагма с подобными размерами. Это обеспечивает наилучшее соотношение сигнал/шум принимаемого потока излучения. С этой же целью в приемном тракте установлен интерференционный узкополосный фильтр, который обрезает фоновое излучение, приходящее в приемный тракт в остальном спектральном диапазоне.
МОДУЛЬ ЛАЗЕРА
Лазерный модуль включает в себя полупроводниковый лазерный диод в корпусе (далее сокращенно лазер), системы термостабилизации лазера, токового драйвера, цепи заряда и ключа разряда лазерного конденсатора. Задача узла по приходу стартового импульса (Start) выработать один лазерный импульс мощностью до 50 Вт. Параметры лазера приведены в табл. 2. Блок-схема узла приведена на рис. 4.
Таблица 2.
Параметры лазера при температуре 22°C
| Параметр | Значение |
|---|---|
| Длина волны на максимуме интенсивности | 905 нм |
| Температурный дрейф длины волны | 0.27 нм/°C |
| Максимальная импульсная мощность | 50 Вт |
| Светоизлучающая область | 10 × 160 мкм |
| Максимальный импульсный ток при длительности импульса 100 нс | 22 А |

Стабилизация длины волны лазера необходима для согласования положения линии излучения с полосой пропускания интерференционного фильтра. Длина волны определяется температурой лазера. Температура диода стабилизируется с помощью термостата на основе внешнего элемента Пельтье и температурного датчика. Опорное значение температуры выбирается с учетом характеристики лазера и диапазона рабочих температур прибора. Рабочая температура лежит в диапазоне от плюс 15°С до плюс 20°С и стабилизируется с точностью ±0.01°С. Термостат работает как на охлаждение, так и на нагрев. Ток через элемент Пельтье регулируется с помощью микросхемы широтно-импульсной модуляции (ШИМ). Максимальный ток – 1.5 А, что достаточно для стабилизации температуры лазера в рабочем диапазоне температур.
Для запуска лазерного диода использован конденсатор накачки, который разряжается через лазер через ключ на основе лавинного транзистора. Токовый драйвер формирует импульс включения лавинного транзистора по импульсу запуска лазера START. Для того чтобы лавинный транзистор перешел в режим пробоя, необходимо достичь тока 200 мА. В момент разряда ток через лазер достигает 20 А и происходит излучение импульса света с мощностью в импульсе до 50 Вт и длительностью 15 нс. В паузе между излучаемыми импульсами конденсатор разряда лазера заряжается через резистор от источника питания 160 В током ~5 мА. Выбранные параметры обеспечивают частоту запуска лазера 2 кГц.
МОДУЛЬ ФОТОДИОДА
Лавинные фотодиоды, работающие в режиме счета фотонов, позволяют эффективно регистрировать слабые импульсные сигналы без использования прецизионных усилителей и скоростных аналогово-цифровых преобразователей (АЦП). Они позволяют работать на уровне предельно малых потоков излучения и дают сигнал в цифровой форме. Измерение интенсивности достигается за счет накопления отсчетов при многократном повторении зондирующих импульсов от импульсных лазеров, способных работать на частотах до десятков килогерц (в нашем случае 2 кГц). Большое число событий, увеличивающих статистическую точность, позволяет значительно снизить требования к нестабильности параметров, дрожанию фронтов времязадающих электронных цепей.
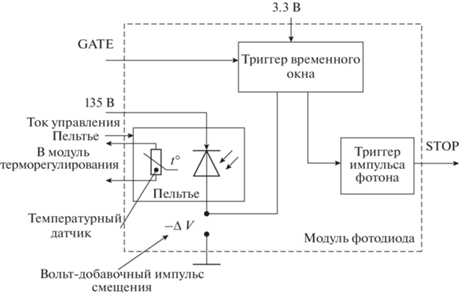
Модуль включает лавинный фотоприемник, который находится в фокальной плоскости приемного объектива, термостат на встроенном Пельтье и температурном датчике, триггер включения временного окна работы фотоприемника в режим счета фотонов и формирователь сигнала приема единичного фотона. В качестве фотоприемника используется кремниевый лавинный фотодиод, работающий в режиме счета единичных фотонов SPAD SAP500T6 (Single-Photon Avalanche Diode). Лавинные диоды имеют герметичный корпус и встроенный охладитель Пельтье. Характеристики лавинного диода приведены в табл. 3, а блок-схема узла – на рис. 5.
Таблица 3.
Характеристики лавинного диода при температуре 22°C
| Наименование параметра | Значение |
|---|---|
| Напряжение пробоя | 135 В |
| Темновой ток | 200 пА |
| Температурный коэффициент напряжения пробоя | 0.35 В/°C |
| Вероятность детектирования фотона при ΔV = 2 В | 5% |
| Частота шумовых отсчетов при ΔV = 2 В | 5000 Гц |
Термостат фотодиода состоит из встроенного Пельтье и температурного датчика и аналогичен термостату лазера. Модуль терморегулирования поддерживает температуру фотодиода 15°С с точностью 0.5°С.
Запирающее напряжение фотодиода устанавливается около 135 В, на 2 В выше порога срабатывания лавины. Для каждого фотодиода порог срабатывания подбирается индивидуально при настройке прибора. Запирающее напряжение поддерживается с точностью не хуже ±20 мВ с током нагрузки 0.5 мА. Фотодиод управляется триггером временного окна. В исходном состоянии фотодиод находится под напряжением ниже порога срабатывания лавины на 1.3 В (фаза гашения лавины). Включение диода в режим счета фотонов происходит по приходу на триггер сигнала “GATE”. Триггер вырабатывает вольт-добавочный импульс, задавая рабочее напряжение выше порога лавинного пробоя.
Длительность сигнала “GATE” может принимать два значения 50 и 100 нс, за это время свет проходит соответственно 15 и 30 м, что соответствует пространственному разрешению 7.5 и 15 м. Если в течение временного окна “GATE” на фотодиод поступит хотя бы один фотон, возникнет лавинный ток по появлению которого триггер с малой задержкой переходит в режим гашения лавины. При этом вырабатывается сигнал прихода фотона, передаваемый в модуль управления. Если ни один фотон не попадает на фотоприемник, перевод фотоприемника в режим гашения происходит по концу сигнала “GATE”.
МОДУЛЬ УПРАВЛЕНИЯ
Модуль предназначен для управления и контроля всеми модулями прибора, обеспечивает сбор и обработку накопленной информации с последующей передачей ее в блок управления МТК. Модуль включает в себя измеритель временных интервалов, собранный на ПЛИС (FPGA) и микроконтроллере. Измеритель временных интервалов предназначен для запуска циклограммы работы модулей и формирования временных задержек и длительности окна приема с последующим суммированием принятых сигналов для каждого окна как функции распределения дальности.
Измеритель временных интервалов включает также преобразователь “время–код”. Параметры дискретизации событий по времени и уровню могут меняться по командам от микроконтроллера. Полученные гистограммы считываются контроллером в память прибора, где они обрабатываются, упаковываются в кадры и передаются в блок управления МТК. Технические характеристики измерителя временных интервалов представлены в табл. 4, а его блок-схема – на рис. 6.
Таблица 4.
Технические характеристики измерителя временных интервалов
| Параметр | Значение |
|---|---|
| Число входных каскадов | 1 |
| Шаг дискретизации входных сигналов | 50 нс |
| “Мертвое” время после регистрации события | 50 нс |
| Ширина канала гистограммы | 50; 100; …, (232–1) нс |
| Максимальное количество каналов гистограммы | 64 К |
| Максимальное число событий в одном канале гистограммы | 232 |
Рис. 6.
Структурная схема измерителя временных интервалов: АЦП – цифро-аналоговый преобразователь; МДС – модуль дискретного сравнения; FPGA – измеритель временных интервалов; М1, М2 – блоки памяти; Σ1 – предварительный сумматор; Σ2 – главный сумматор; микроконтроллер; RS422 – порт компьютера; EEPROM – перепрограммируемая память.
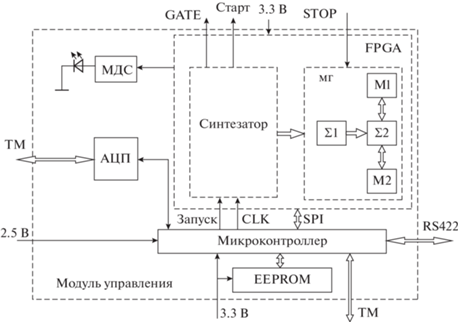
Микроконтроллер управляет ПЛИС по порту SPI. С кварцевого генератора микроконтроллера на ПЛИС поступает частота 100 МГц, на основе которой формируются сетки частот, необходимые для работы модуля дискретного сравнения, модуля лазера, модуля фотодиода. По команде “Запуск” от микроконтроллера запускается циклограмма, по которой на лазер с заданной частотой поступает 64 импульса “Старт”. В паузе между импульсами лазера синтезатор формирует четыре последовательности из 256 импульсов “GATE”, сдвинутых по времени друг относительно друга на 25 нс и которые поступают на фотодиод. Длительность “GATE” составляет 50 нс. Задержка между импульсами составляет соответственно 100 нс. Количество этих импульсов может меняться по команде от микроконтроллера от 256 до 4096. Для каждого импульса “GATE” в памяти ПЛИС выделяются ячейки памяти глубиной суммирования от 256 бит до 64 Кбит. Если в течение временного окна “GATE” приходит импульс “STOP”, он добавляется в соответствующую ячейку памяти ПЛИС. Глубина ячеек памяти устанавливается по команде от микроконтроллера. Длительность временного окна 50 нс соответствует пространственной длине 7.5 м. Соответственно, в каждой ячейке памяти накапливаются фотоны, отраженные средой, находящейся в поле зрения прибора, из объема (усеченный конус) протяженностью 7.5 м.
После завершения аппаратного накопления гистограмма считывается в оперативную память для последующей программной обработки данных. Размер данных гистограммы и, соответственно, время пересылки в оперативную память зависят от соотношения величины установленного временного окна к величине канала гистограммы.
На плате также установлен аналого-цифровой преобразователь и мультиплексор для опроса контрольных сигналов с последующей записью в память. Из полученных данных микроконтроллер формирует пакеты для передачи через порт RS-422. Считывание пакетов происходит по запросам от блока управления БДВА МТК.
МОДУЛЬ ТЕРМОРЕГУЛИРОВАНИЯ
Модуль терморегулирования, или термостабилизации, состоит из двух идентичных каналов, каждый из которых включает мостовую схему с усилителями и схему управления Пельтье на основе широтно-импульсной модуляции тока. Блок-схема модуля приведена на рис. 7.
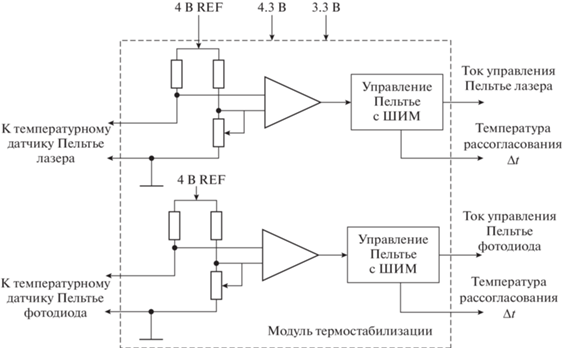
Температурный датчик лазера или фотодиода включен в одно плечо мостовой схемы. В другом плече моста находится регулируемый делитель. С помощью регулировки в этом плече устанавливается напряжение, соответствующее выбранной температуре стабилизации. Мост запитывается высокостабильным напряжением 4 В (REF). Разность сигналов между двумя делителями усиливается и подается на схему управления Пельтье. В зависимости от температуры, мост разбалансируется и на выходах усилителя появляется отрицательный или положительный сигнал, который преобразуется в ШИМ ток управления Пельтье. Также, разностный сигнал поступает в модуль управления как контрольный параметр.
МОДУЛЬ ПИТАНИЯ
Модуль питания формирует необходимые уровни напряжения для всех систем прибора из шины питания 5 В. Модуль включает преобразователи на 160 В, на 3.3 В, на 2.5 В, опорного напряжения на 4 В, а также линейный стабилизатор на 4.3 В и регулятор высокостабильного напряжения 135 В. Блок-схема модуля приведена на рис. 8.

Низковольтный преобразователь на 4.3 В собран на линейном стабилизаторе; опорное напряжение на высокостабильном стабилизаторе. Для выходного напряжения 160 В используется DC/DC конвертор. Выходное напряжение 135 В (регулируемое в диапазоне от 120 до 150 В) получается понижением 160 В. Высокая стабильность и регулировка понижающего преобразователя обеспечиваются с помощью ЦАП и усилителей, включенных в обратную цепь. Уровень напряжения устанавливается по команде от контроллера.
ПРОГРАММА РАБОТЫ ПРИБОРА НА ПОВЕРХНОСТИ МАРСА
Для работы прибора предусмотрены три стандартных режима работы:
1) дневной режим;
2) ночной режим;
3) пассивный режим.
Работа прибора привязана к общей циклограмме работы метеокомплекса посадочного аппарата ЭкзоМарс-2022. Управление осуществляется от блока БДВА МТК, который формирует временную диаграмму включений Лидара в дневное и ночное время. Параметры периода и продолжительности базового сценария работы прибора приведены в табл. 5, 6, 7. При необходимости, временная последовательность включений может быть изменена по командам с Земли; аналогично могут быть изменены все параметры режимов работы прибора. Первое включение прибора производится после отстрела парашюта во время посадки аппарата на поверхность Марса, которое продолжается до момента касания поверхности. Частота включений на начальном этапе связана с ограниченными возможностями передачи информации с посадочного аппарата на Землю. Поэтому во время спуска прибор включается после отделения парашюта и работает до посадки с параметрами дневного режима (см. табл. 5). В дальнейшем при работе на поверхности прибор работает по временной циклограмме с параметрами, приведенными в табл. 5−7.
Таблица 5.
Режим 1, дневной
| № | Обозначение | Наименование параметра | Значение |
|---|---|---|---|
| 0 | T_heater | Задержка от подачи питания до начала измерения | 60 c |
| 1 | N samples | Число ячеек дальности (1.5 км) | 200 |
| 2 | Period | Частота повторения лазерных вспышек | 500 мкс |
| 3 | N | Число запусков строба фотоприемник для каждой ячейки дальности | 40 000 |
| 4 | LP enable | Разрешение работы лазера | Вкл. |
| 5 | DATA block | Объем блока данных (4 × 200 байт) | 800 байт |
| 6 | Длительность измерения | 140 с | |
| 7 | Периодичность включения | 1 раз в 15 мин |
Таблица 6.
Режим 2, ночной
| № | Обозначение | Наименование параметра | Значение |
|---|---|---|---|
| 0 | T_heater | Задержка от подачи питания до начала измерения | 60 c |
| 1 | N samples | Число ячеек дальности (10 км) | 1500 |
| 2 | Period | Частота повторения лазерных вспышек | 500 мкс |
| 3 | Ncycles (×16) | Число запусков строба фотоприемник для каждой ячейки дальности | 120 000 |
| 4 | LP enable | Разрешение работы лазера | Вкл. |
| 5 | DATA block | Объем блока данных (4 × 200 байт) | 800 байт |
| 6 | Длительность измерения | 300 с | |
| 7 | Периодичность включения | 1 раз в 30 мин |
Таблица 7.
Режим 3, фотометрический (пассивный)
| № | Обозначение | Наименование параметра | Значение |
|---|---|---|---|
| 0 | T_heater | Задержка от подачи питания до начала измерения | 30 c |
| 2 | N samples | Число ячеек дальности (10 км) | 20 |
| 3 | Period | Частота повторения запуска | 100 мкс |
| 4 | N | Число стартов измерения в одной диаграмме | 40 000 |
| 7 | LP enable | Разрешение работы лазера | Выкл. |
| 9 | DATA block | Объем блока данных (4 × 20 байт) | 80 байт |
| 10 | Длительность измерения | 33 с | |
| 11 | Периодичность включения 15 мин, перед каждым активным режимом 3 раза подряд | 1 раз в 15 мин |
Каждый режим имеет следующие параметры: дальность, число включений лазера во время измерения, число стартов (стробов) фотоприемника для накоплений в ячейку дальностей. Дневной режим включает получение профиля распределения аэрозоля на дистанции до 1500 м и дальность измерений ограничивается шумом рассеянного света в приемном канале. Ночной режим включает получение профиля распределения аэрозоля на дистанции до 2000 м и обнаружение возможного облачного слоя до 10 км и ограничивается собственными шумами фотоприемника. Пассивный режим включается каждый раз перед активным режимом, три измерения длительностью 1 с подряд.
Возможность коррекции параметров и временных последовательностей позволит адаптивно скорректировать работу прибора по первым полученным данным с поверхности Марса.
КАЛИБРОВКА ПРИБОРА
Основное лидарное уравнение для расчета энергии принимаемого сигнала фотоприемником лидара имеет вид (Measures, 1984):
(1)
$P\left( {\lambda ,R} \right) = \,\,~{{E}_{L}}\xi (\lambda )T\left( R \right)K\left( R \right)\frac{{{{A}_{0}}}}{{{{R}^{2}}}}\beta \left( R \right)\frac{{c{{T}_{g}}}}{2},$Для Лидара, работающего в режиме счета фотонов, уравнение (1) можно записать в виде зависимости числа фотонов, прибывающих на фотоприемник:
(2)
$P\left( r \right) = \frac{{{{E}_{l}}}}{E}KG\left( R \right)T\left( R \right)\frac{{{{A}_{0}}}}{{{{R}^{2}}}}\beta \left( R \right)\frac{{c{{T}_{g}}}}{2},$Для лидара непосредственно измеряемой величиной является число зарегистрированных фото-отсчетов Ni при проведении N числа испытаний (включений строба регистрации). Связь числа Ni c числом фотонов Pi (произведена замена P(R) для i‑й ячейки, соответствующей дальности R) определяется формулой:
где $~\eta ~$ – квантовая эффективность.Следует понимать, что Pi − величина статистическая, определяющая энергию, выраженную в единицах фотонов, зафиксированную фотоприемником, и может быть меньше единицы. Более того, для оптимального режима работы величина Piη должна быть меньше единицы для предотвращения насыщения фотоприемника.
Отметим, что для лидара, работающего в среде без селективного поглощения, а также в слабо рассеивающей среде, где не учитывается поглощение на частицах аэрозоля, коэффициент пропускания T(R) = 1.
Целью калибровки лидара является получение соответствия между измеренным количеством фото-отсчетов и величиной коэффициента обратного отражения среды β в виде некоторого коэффициента. Значение такого коэффициента можно получить как расчетным путем, методом компьютерного моделирования, подставляя паспортные значения элементов, так и натурной калибровкой.
ЭКСПЕРИМЕНТАЛЬНАЯ КАЛИБРОВКА ЛИДАРА
На первом этапе калибровок проводилось измерение форм-фактора вдоль трассы лидарного зондирования, измерение функции перекрытия G(R). Калибровка заключалась в измерении величины лидарного сигнала при рассеянии импульса зондирования поверхностью топографической мишени в зависимости от расстояния до мишени. Измерения проводились на трассе в здании ИКИ РАН протяженностью 100 м. Для избегания насыщения перед лидаром помещались ослабители (нейтральные оптические фильтры).
Полученная нормированная экспериментальная зависимость приведена на рис. 9 вместе с аналогичной зависимостью, определенной методом численного моделирования. Моделирование проводилось по данным измерения распределения интенсивности в поперечном сечении лазерного пучка и измеренной чувствительности по полю зрения приемного объектива. Следует отметить, что экспериментально полученная зависимость находится в хорошем соответствии с данными численного моделирования. Экспериментальная кривая не перекрывает весь диапазон дальности работы лидара. поэтому предполагается, что для обработки лидарных данных будут использоваться соответствующая аппроксимация или данные численного моделирования.
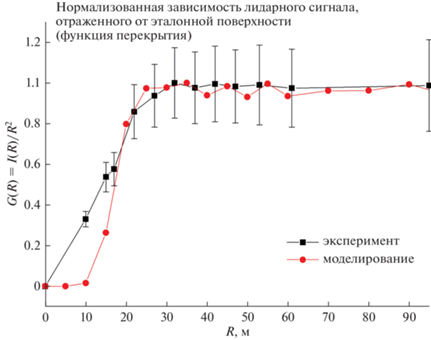
Зависимость G(R) необходима для коррекции сигнала в ближней зоне в интервале от 10 до 30 м и для подтверждения точности юстировки соосности пучка лазера, и поля зрения приемного тракта.
Для получения экспериментального калибровочного коэффициента связи коэффициента обратного рассеяния и измеряемого сигнала применялись дифузно-отражающие мишени с известным значением альбедо. Измерения проводились на горизонтальной трассе в здании ИКИ РАН. Мишени устанавливались в дальней зоне трассы зондирования на расстоянии 40–70 м от лидара. Для предотвращения насыщения измеряемого сигнала перед лидаром устанавливались ослабляющие оптические фильтры НС с паспортизованными коэффициентами поглощения. Апертура фильтров перекрывала одновременно передающий и приемный каналы с целью компенсации влияния отклонения от плоскостности поверхностей фильтров на взаимную ориентацию оптических осей каналов лидара. Для диффузно отражающей мишени в приближении закона Ламберта рассчитывался коэффициент отражения по нормали. Величины таких коэффициентов для использованных мишеней находились в интервале от 0.2 до 0.3 для рабочей длинны волны лидара. Проведенные измерения позволили определить коэффициент пересчета единиц АЦП показаний прибора к единицам коэффициента отражения твердой мишени имитирующего коэффициент обратного рассеяния среды. В ходе измерений для коэффициента ослабления 2 × 10–6 на дальности 50 м величина обнаружительной способности лидара составила 4 × 10–7 1/м ср при превышении измеряемого сигнала над уровнем собственных шумов в 3σ (при отсутствии фоновой засветки и минимального рабочего времени накопления сигнала).
ПОДТВЕРЖДЕНИЕ ФУНКЦИОНАЛЬНЫХ ВОЗМОЖНОСТЕЙ ПРИБОРА НА РЕАЛЬНЫХ ТРАССАХ
Для проверки работы прибора в реальных условиях выполнены измерения городского аэрозоля на наклонной трассе при наличии слабой облачности. Пример измеренного распределения аэрозоля для чистой атмосферы представлен на рис. 10.
Рис. 10.
Распределения аэрозоля на наклонной трассе (70° от горизонта) в условиях чистой атмосферы и слабой, переменной облачности.
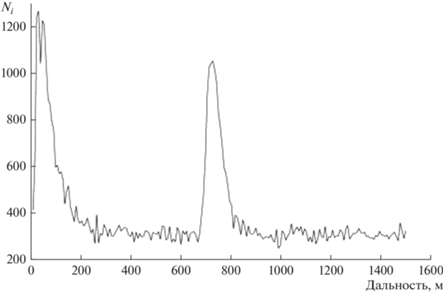
Для оценки величины коэффициента обратного отражения городского аэрозоля были применены показания метеостанции в аэропорте Внуково в период измерения с 18:00 до 20:00 ч 15.10.2019 г. как ближайшей точки измерений и данные сайта www.accuweather.com. Использовались данные о высоте границы облачного слоя, мощности облачного покрова и метеорологической дальности видимости (МДВ). Для метеостанции Внуково показания по МДВ указаны более 10 км, высота облачного слоя 650 м, облачность 6 баллов, а по данным сайта https://www.accuweather.com/ показания МДВ – 52 км.
Для численной оценки коэффициента обратного рассеяния в ближней зоне применено значение МДВ равное 52 км, что соответствует коэффициенту рассеяния βsc = 7.8 × 10–5 м–1 (Мак-Картни, 1979). Коэффициент βsc является интегральной величиной для всех углов рассеяния, и вычисление коэффициента обратного рассеяния, измеряемого лидаром, возможно только при точных данных о физических свойствах аэрозоля. Для подтверждения функциональных возможностей прибора можно использовать оценку связи коэффициента обратного рассеяния βπ с МДВ (или коэффициент рассеяния) для прибрежных атмосферных дымок, приведенных в литературе (Калошин и др., 1994). Соответственно проведенные измерения показали, что разработанный лидар способен регистрировать аэрозоль с коэффициентом отражения βπ ≈ 2 × 10–5 м–1ср–1 на дальности не менее 200 м в условиях слабой фоновой засветки.
Также, для подтверждения функциональной возможности прибора проводились измерения до нижней границы облачности при уменьшении наклона трассы. Максимальная дальность наклонной трассы ограничивалась городской застройкой и позволяла измерять динамику и структуру облачного слоя на расстоянии не менее 1200 м.
Полученные экспериментальные результаты подтвердили требования к прибору по назначению. К сожалению, в силу жестких временных и финансовых ограничений при разработке прибора не удалось провести кросс-калибровки с лидарами других разработчиков и по эталонным аэрозолям в аэрозольных камерах НПО “Тайфун”.
ЗАКЛЮЧЕНИЕ
Миниатюрный лидар на основе полупроводникового импульсного лазера, разработанный для посадочной платформы Европейского космического агентства (ESA) и Роскосмоса ЭкзоМарс-2022, изготовлен и прошел все необходимые тестовые испытания. Его высокие характеристики подтверждены лабораторными и натурными калибровками. После завершения совместной программы ESA−Роскосмос прибор может быть использован в национальной программе исследования Марса при помощи посадочной платформы. Его малая масса (1 кг, по сравнению с 6 кг лидара Phoenix) повышает шансы установки прибора на другие средства исследования на поверхности Марса, увеличивая объем информации о пограничном слое и метеорологии планеты. Подобный лидар также имеет перспективы применения с аэростатной платформы для исследования облачного слоя Венеры.
Список литературы
Калошин Г.А., Козлов В.С., Панченко М.В., Полькин В.В. Локационный измеритель метеорологической дальности видимости в составе лазерного маяка // Оптика атмосферы и океана. 1994. Т. 7. № 10. С. 1444–1449.
Линкин В.М., Липатов А.Н., Ляш А.Н. Микролидар для исследования приземных слоев атмосфер планет // “Современные и перспективные разработки и технологии в космическом приборостроении”, Таруса (25–27 марта 2003 г.) // Сб. докл. ИКИ РАН. 2004. С. 295–308.
Мак-Картни Э. Оптика атмосферы. М.: Изд. МИР, 1979. 422 с.
Arruego I., Apéstigue V., Jiménez-Martín J., Martίnez-Oter J., Álvarez-Rıós F.J., González-Guerrero M., Rivas J., Azcue J., Martίn I., Toledo D., Gómez L., Jiménez-Michavila M., Yela M. DREAMS-SIS: The Solar Irradiance Sensor on-board the ExoMars 2016 lander // Adv. Space Res. 2017. V. 60. P. 103. https://doi.org/10.1016/j.asr.2017.04.002
Arumov G.P., Bukharin A.V., Linkin V.M., Lipatov A.N., Lyash A.N., Makarov V.S., Pershin S.M., Tiurin A.V. Compact aerosol lidar for Martian atmosphere monitoring according to the NASA Mars Surveyor Program '98 // Proc. SPIE. 1999. № 3688. P. 494. https://doi.org/10.1117/12.337558
Bukharin A.V., Linkin V.M., Lipatov A.N., Lyash A.N., Makarov V.S., Pershin S.M., Tiurin A.V. Russian Compact Lidar for NASA Mars Surveyor Program 98 // 19th Int. Laser Radar Conf., Annapolis, Maryland, July 1998. P. 241–244.
Daerden F., Whiteway J.A., Davy R., Verhoeven C., Komguem L., Dickinson C., Taylo P.A., Larsen N. Simulating observed boundary layer clouds on Mars // Geophys. Res. Lett. 2010. V. 37. id. L04203. https://doi.org/10.1029/2009GL041523.
Daerden F., Whiteway J.A., Neary L., Komguem L., Lemmon M.T., Heavens N.G., Cantor B.A., Hébrard E, Smith M.D. A solar escalator on Mars: Self-lifting of dust layers by radiative heating // Geophys. Res. Lett. 2015. V. 42. P. 7319. https://doi.org/10.1002/2015GL064892
Davy R., Taylor P.A., Weng W., Li P.-Y. A model of dust in the Martian lower atmosphere // J. Geophys. Res.: Atmospheres. 2009. V. 114. id. D04108. https://doi.org/10.1029/2008JD010481
Dickinson C., Whiteway J.A., Komguem L., Moores J.E., Lemmon M.T. Lidar measurements of clouds in the planetary boundary layer on Mars // Geophys. Res. Lett. 2010. V. 37. id. L18203. https://doi.org/10.1029/2010GL044317.
Dickinson C., Komguem L., Whiteway J.A., Illnicki M., Popovici V., Junkermann W., Connolly P., Hacker J. Lidar atmospheric measurements on Mars and Earth // Planet. and Space Sci. 2011. V. 59. P. 942. https://doi.org/10.1016/j.pss.2010.03.004
Hinson D., Wang H., Wilson J., Spiga A. Night time convection in water-ice clouds at high northern latitudes on Mars // Icarus. 2022. V. 371. id. 114693. https://doi.org/10.1016/j.icarus.2021.114693.
Ivanov A.B., Muhleman D.O. Opacity of the Martian atmosphere from Mars Orbiter Laser Altimeter (MOLA) observations // Geophys. Res. Lett. V. 25. P. 4417–4420. 1998. https://doi.org/10.1029/1998GL900060
Komguem L., Whiteway J.A., Dickinson C., Daly M., Lemmon M.T. Phoenix LIDAR measurements of Mars atmospheric dust // Icarus. 2013. V. 223. P. 649. https://doi.org/10.1016/j.icarus.2013.01.020
Kurgansky M.V. To the theory of particle lifting by terrestrial and Martian dust devils // Icarus. 2018. V. 300. P. 97. https://doi.org/10.1016/j.icarus.2017.08.029
Mason E.L., Smith M.D. Temperature fluctuations and boundary layer turbulence as seen by Mars Exploration Rovers Miniature Thermal Emission Spectrometer // Icarus. 2021. V. 360. id. 114350. https://doi.org/10.1016/j.icarus.2021.114350.
Measures R.M. Laser Remote Sensing: Fundamentals and Applications. New York: John Wiley, 1984. 510 p.
Moores J.E., Komguem L., Whiteway J.A., Lemmon M.T., Dickinson C., Daerden F. Observations of near-surface fog at the Phoenix Mars landing site // Geophys. Res. Lett. 2011. V. 38. id. L04203. https://doi.org/10.1029/2010GL046315.
Pershin S.M., Linkin V.M., Bukharin A.V., Makarov V.N., Patsaev D., Prochazka I., Hamal K., Dubinin D., Kuznetsov V. Compact “safe eyes” radiation level lidar for environmental media monitoring // Proc. SPIE. 1993. № 2107. P. 336. https://doi.org/10.1117/12.162169
Pershin S.M., Bukharin A.V., Makarov V.N., Linkin V.M., Patsaev D., Prochazka I., Hamal K. Portable nanojoule backscatter lidar for environmental sensing // Proc. SPIE. 1992. № 1752. P. 294. https://doi.org/10.1117/12.130741.
Pershin S.M. Trouble-free compact lidar for in/outdoor atmosphere monitoring // Proc. SPIE. 1995. № 2506. P. 428. https://doi.org/10.1117/12.221044
Petrosyan A., Galperin B., Larsen S.E., Lewis S.R., Määttänen A., Read P.L., Renno N., Rogberg L.P.H.T., Savijärvi H., Siili T., Spiga A., Toigo A., Vázquez L. The Martian atmospheric boundary layer // Rev. Geophys. 2011. V. 49. id. RG3005. https://doi.org/10.1029/2010RG000351.
Read P.L., Galperin B., Larsen S.E., Lewis S.R., Määttänen A., Petrosyan A., Renno N., Savijärvi H., Siili T., Spiga A. The Martian Planetary Boundary Layer // Acm. book. Cambridge Univ. Press, 2017. P. 106. https://doi.org/10.1017/9781139060172.007.
Scaccabarozzi D., Saggin B., Pagliara C., Magni M., Marco Tarabini M., Esposito F., Molfese C., Cozzolino F., Cortecchia F., Dolnikov G., Kuznetsov I., Lyash A., Zakharov A. MicroMED, design of a particle analyzer for Mars // Measurement. 2018. V. 122. P. 466–472. https://doi.org/10.1016/j.measurement.2017.12.041
Smith D.E., Zuber M.T., Frey H.V., Garvin J.B., Head J.W., Muhleman D.O., Pettengill G.H., Phillips R.J., Solomon S.C., Zwally H.J., Banerdt W.B., Duxbury T.C. Topography of the Northern Hemisphere of Mars from the Mars Orbiter Laser Altimeter // Science. 1998. V. 279. P. 1686. https://doi.org/10.1126/science.279.5357.1686
Smith D.E., Zuber M.T., Solomon S.C., Phillips R.J., Head J.W., Garvin J.B., Banerdt W.B., Muhleman D.O., Pettengill G.H., Neumann G.A., Lemoine F.G., Abshire J.B., Aharonson O., Brown C.D., Hauck S.A., Ivanov A.B., McGovern P.J., Zwally H.J., Duxbury T.C. The global topography of Mars and implications for surface evolution // Science. 1999. V. 284. P. 1495. https://doi.org/10.1126/science.284.5419.1495
Spiga A. Turbulence in the lower atmosphere of Mars enhanced by transported dust particles // J. Geophys. Res.: Planets. 2021. V. 126. id. e07066. https://doi.org/10.1029/2021JE007066.
Tamppari L.K., Lemmon M.T. Near-surface atmospheric water vapor enhancement at the Mars Phoenix lander site // Icarus. 2020. V. 343. id. 113624. https://doi.org/10.1016/j.icarus.2020.113624.
Toledo D., Rannou P., Pommereau J.-P., Foujols T. The optical depth sensor (ODS) for column dust opacity measurements and cloud detection on Martian atmosphere // Experimental Astron. 2016. V. 42. P. 61. https://doi.org/10.1007/s10686-016-9500-7
Vago J., Witasse O., Svedhem H., Baglioni P., Haldemann A., Gianfiglio G., Blancquaert T., McCoy D., de Groot R. ESA ExoMars program: The next step in exploring Mars // Sol. Syst. Res. 2015a. V. 49. P. 518. https://doi.org/10.1134/S0038094615070199
Vago J.L., Lorenzoni L., Calantropio F., Zashchirinskiy A.M. Selecting a landing site for the ExoMars 2018 mission // Sol. Syst. Res. 2015b. V. 49. P. 538. https://doi.org/10.1134/S0038094615070205
Whiteway J., Daly M., Carswell A., Cook C.R., Dickenson C., Komguem L., Daly M., Hahn J.F., Taylor P.A. Lidar on the Phoenix mission to Mars // J. Geophys. Res.: Planets. 2008. V. 113. id. E00A08. https://doi.org/10.1029/2007JE003002.
Whiteway J.A., Komguem L., Dickinson C., Cook C., Illnicki M., Seabrook J., Popovici V., Duck T.J., Davy R., Taylor P.A., Pathak J., Fisher D., Carswell A.I., Daly M., Hipkin V., Zent A.P., Hecht M.H., Wood S.E., Tamppari L.K., Renno N., Moores J.E., Lemmon M.T., Daerden F., Smith P.H. Mars water-ice clouds and precipitation // Science. 2009. V. 325. P. 68. https://doi.org/10.1126/science.1172344
Zakharov A.V., Dolnikov G.G., Kuznetsov I.A., Lyash A.N., Esposito F., Molfese C., Arruego Rodríguez I., Seran E., Godefroy M., Dubov A.E., Dokuchaev I.V., Knyazev M.G., Bondarenko A.V., Gotlib V.M., Karedin V.N., Shashkova I.A., Abdelaal M.E., Kartasheva A.A., Shekhovtsova A.V., Bednyakov S.A., Barke V.V., Yakovlev A.V., Grushin V.A., Bychkova A.S., Popel S.I., Korablev O.I., Rodionov D.S., Duxbury N.S., Petrov O.F., Lisin E.A., Vasiliev M.M., Poroikov A.Yu., Borisov N.D., Cortecchia F., Saggin B., Cozzolino F., Brienza D., Scaccabarozzi D., Mongelluzzo G., Franzese G., Porto C., Martín Ortega Rico A., Santiuste N.A., deMingo J.R., Popa C.I., Silvestro S., Brucato J.R. Dust Complex for Studying the Dust Particle Dynamics in the Near-Surface Atmosphere of Mars // Sol. Syst. Res. 2022. V. 56. № 6 . P. 351–368. https://doi.org/10.1134/S0038094622060065
Zuber M.T., Smith D.E., Solomon S.C., Muhleman D.O., Head J.W., Garvin J.B., Abshire J.B., Bufton J.L. The Mars Observer laser altimeter investigation // J. Geophys. Res.: Planets. 1992. V. 97. P. 7781–7797. https://doi.org/10.1029/92JE00341
Дополнительные материалы отсутствуют.
Инструменты
Астрономический вестник