ЖЭТФ, 2022, том 161, вып. 4, стр. 596-609
© 2022
КОСМИЧЕСКИЙ ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР:
ПУТИ ПОВЫШЕНИЯ ТОЧНОСТИ МОДЕЛЕЙ
ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ
В. К. Милюковa*, А. И. Филеткинa,b, А. С. Жамковa
a Государственный астрономический институт им. П. К. Штернберга,
Московский государственный университет им. М. В. Ломоносова
119234, Москва, Россия
b Физический факультет,
Московский государственный университет им. М. В. Ломоносова
119234, Москва, Россия
Поступила в редакцию 16 ноября 2021 г.,
после переработки 7 декабря 2021 г.
Принята к публикации 16 декабря 2021 г.
Приведены результаты анализа путей повышения пространственного разрешения статических моделей
гравитационного поля Земли, а также ежемесячных моделей путем оптимизации орбитальных парамет-
ров (большой полуоси и наклонения) космического аппарата на низкой околоземной орбите с градиен-
тометром на борту. Приведены требования к выбору орбит для космического аппарата перспективной
градиентометрической миссии. По результатам численного моделирования найдены элементы орбит кос-
мического аппарата, которые удовлетворяют требованию 100-процентного заполнения поверхности Земли
измерениями (подспутниковыми трассами) с пространственным разрешением 0.3◦ × 0.3◦, что более чем
в 2 раза лучше разрешения статических моделей гравитационного поля Земли, полученных в миссии
GOCE. Найденные орбитальные конфигурации также позволяют строить ежемесячные модели грави-
тационного поля Земли c пространственным разрешением 0.9◦ × 0.9◦, что в 4 раза лучше разрешения
моделей, полученных в миссии GRACE. Проведена оценка инструментальных требований к основному
измерительному оборудованию перспективной космической градиентометрической миссии.
Статья для специального выпуска ЖЭТФ, посвященного 100-летию А. Е. Чудакова
DOI: 10.31857/S0044451022040149
на до 224 км, и на ней он проработал до конца
EDN: DQZABX
срока активного существования (ноябрь 2013 г.).
Основной инструмент для решения целевой за-
1. ВВЕДЕНИЕ
дачи КА — электростатический гравитационный
градиентометр GRADIO, состоящий из шести
Европейский космический аппарат (КА) GOCE
трехосных акселерометров SUPERSTAR, образу-
(the Gravity field and steady-state Ocean Circulation
ющих попарно три ортогональных плеча длиной
Explorer) был выведен на низкую околоземную
0.5
м: вдоль направления движения, перпенди-
солнечно-синхронную орбиту с наклонением 96.7◦
кулярно плоскости орбиты и в направлении на
17 марта 2009 г. российской ракетой-носителем «Ро-
Землю (надир). Чувствительность акселерометров
кот» с космодрома Плесецк [1]. Целью проекта яв-
достигала рекордного для того времени уровня
лялось исследование статической части гравитаци-
2 · 10-12 м · c-2 · Гц-1/2. Соответственно, точность
онного поля Земли (ГПЗ).
измерения гравитационных градиентов составляла
Первоначально высота орбиты КА, на которой
10-20 мЭ · Гц-1/2 (1 этвеш = 1 Э = 10-9 с-1). По-
аппарат проработал до июля 2012 г., составляла
мимо градиентометра на борту КА был установлен
254
км. Затем высота орбиты КА была сниже-
приемник GPS, с помощью которого вычислялось
положение спутника на орбите с точностью 1-2 см.
* E-mail: vmilyukov@yandex.ru
596
ЖЭТФ, том 161, вып. 4, 2022
Космический гравитационный градиентометр: . ..
Эти измерения использовались для геолокации
Pnm(sin ϕ) — нормированные присоединенные функ-
измеренных градиентов силы тяжести, а также в
ции Лежандра степени n и порядка m;
Cnm
Snm —
качестве наблюдаемых данных для определения
нормированные коэффициенты Стокса. Максималь-
длинноволновых компонент ГПЗ.
ная степень разложения Nmax определяет простран-
Ввиду низкой высоты рабочей орбиты КА GOCE
ственное разрешение модели ГПЗ.
испытывал сильное влияние сопротивления атмо-
Градиентометрические наблюдения — это точеч-
сферы, поэтому одним из ключевых элементов бор-
ные измерения вторых производных гравитацион-
товой аппаратуры КА являлась система компенса-
ного потенциала Vi,j = ∂2V/∂xi∂xj (i, j = 1, 2, 3).
ции сноса и контроля высоты, которая удержива-
Измерения проводятся относительно системы коор-
ла пробные массы акселерометров в состоянии «сво-
динат, связанной с градиентометром. Неизвестны-
бодного падения», а также поддерживала орбиту на
ми, которые задают модель ГПЗ и которые, в свою
первоначальной высоте. Работа системы основана
очередь, необходимо определить из измерений, яв-
на ионных микродвигателях с тягой в диапазоне от
ляются коэффициенты сферических гармоник
Cnm
1 до 20 мН, работающих в системе обратной связи
и
Snm.
с акселерометрами. Запас рабочего тела двигателей
Принцип создания модели EGM_TIM_RL05 за-
ограничил нахождение КА на орбите. Спустя 4 го-
ключался в получении модели ГПЗ, основанной
да, когда оно закончилось, миссия прекратила свое
только на данных GOCE, т. е. в исключении ка-
существование.
кой-либо априорной информации, основанной на
Было опубликовано достаточно много различ-
других имеющихся моделях ГПЗ и вводимой в реше-
ных моделей ГПЗ, в которых были использованы
ние. Таким образом, коэффициенты Стокса разло-
данные GOCE, в том числе модели, основанные
жения ГПЗ оценивались «с нуля». Получение такой
только на наблюдениях GOCE [1-6]. Последняя из
независимой модели является очень важным, по-
этой серии модель, которая использует весь набор
скольку она позволяет проводить корректное срав-
данных, полученных в миссии GOCE, — это модель
нение как с другими имеющимися моделями ГПЗ,
EGM_TIM_RL05 [7].
так и с разрабатываемыми в перспективе.
Основные достижения миссии GOCE: средняя
При построении решения использовался так на-
точность определения высот геоида около 2.4 см с
зываемый временной подход [2,5,6]. В этом подходе
пространственным разрешением 100 км за предела-
как градиентометрические, так и GPS-наблюдения
ми полярных областей, что соответствует точности
представляются в виде набора измерений c часто-
определения аномалий гравитационного поля около
той опроса 1 Гц на временной шкале орбитального
0.7 мГал (1 Гал = 1 см/c2) [7].
движения КА. GPS-данные движения КА по орби-
Целью настоящей работы является исследование
те были разделены на короткие дуги (35 угл. мин),
орбитальных и инструментальных параметров пер-
для каждой из которых составлялась система нор-
спективной градиентометрической миссии, которая
мальных уравнений. Затем, с учетом краевых усло-
смогла бы существенно улучшить пространственное
вий каждой дуги, была получена единая систе-
разрешение статической модели ГПЗ, имеющейся в
ма нормальных уравнений, соответствующая всем
настоящее время по результатам измерений проекта
GPS-наблюдениям. Оба типа наблюдений были объ-
GOCE.
единены в совместную систему нормальных уравне-
ний, которая решалась методом наименьших квад-
2. МОДЕЛЬ ГРАВИТАЦИОННОГО ПОЛЯ
ратов. Из-за выбранного наклонения орбиты в 96.7◦
ЗЕМЛИ EGM_TIM_RL05
полярные области (угол полярной области θ0
≈
≈ 0.117 рад ≈ 6.7◦) оставались непокрытыми изме-
Гравитационный потенциал Земли V (r, ϕ, λ) в
рениями, что приводит к искажению коэффициен-
сферических координатах (r — радиус, ϕ — широта,
тов гармоник, порядок которых определяется нера-
λ — долгота) обычно представляется в виде разло-
венством m < mmax = |θ0|n, где m и n — порядок и
жения по сферическим гармоникам [8]
степень гармонических коэффициентов [9]. Это при-
GME
∑
(aE )n
∑
V (r, ϕ, λ) =
Pnm (sinϕ) ×
водит к тому, что обратная задача является некор-
r
r
n=0
m=0
ректной. Чтобы стабилизировать решение и ограни-
[
]
×
Cnm cos(mλ) +
Snm sin(mλ)
,
(1)
чить разложение (1), были введены псевдонаблюде-
ния
где GME — геоцентрическая гравитационная посто-
}
10-5
янная; aE — средний экваториальный радиус Земли;
zi = 0, σzi =
,
zi ∈
Cnm,Snm
,
(2)
n2
597
В. К. Милюков, А. И. Филеткин, А. С. Жамков
ЖЭТФ, том 161, вып. 4, 2022
где σzi означает стандартное отклонение, получен-
ное по эмпирическому правилу Каулы [10].
В результате в систему нормальных уравнений
были добавлены еще две регуляризационные матри-
цы. Первая матрица служит для стабилизации ко-
эффициентов c m < mmax. Вторая матрица регуля-
ризации стабилизирует коэффициенты высоких сте-
пеней (n > 200) и улучшает отношение сигнал/шум.
Для этой матрицы m > mmax и n > 200.
За все время существования миссии результа-
тивный интервал наблюдений (без учета времени
на технические перерывы и маневры КА) составил
1270 дней. По сравнению с предыдущими моделями
GOCE в EGM_TIM_RL05, за счет лучшего отноше-
Рис. 1. Изменение высоты орбиты КА под воздействием
ния сигнал/шум при более низкой орбите на втором
сопротивления атмосферы
этапе миссии (224 км), удалось увеличить разреше-
ние по коэффициентам Стокса до степени/порядка
280 (71.5 км).
орбитах (ниже 450 км) влияние сопротивления атмо-
сферы увеличивается, что ограничивает срок актив-
ного существования КА и вызывает необходимость
3. ВЫБОР ИСХОДНЫХ ДАННЫХ ДЛЯ
использования систем компенсации сноса спутника
ПРОВЕДЕНИЯ ЧИСЛЕННОГО
и контроля высоты.
МОДЕЛИРОВАНИЯ
Для оценки степени деградации орбиты бы-
Проведенный анализ успешно реализованных
ло выполнено численное моделирование движения
миссий GRACE [11] и GRACE FO [12] показал [13],
КА на различных сверхнизких высотах с учетом
что выбор оптимальных параметров КА имеет осно-
влияния атмосферы, эволюция которых изобра-
вополагающее значение при исследовании возмож-
жена на рис. 1. В качестве модели атмосферы
ностей будущих гравиметрических миссий. Причем
в численных расчетах была использована модель
на плотность заполнения поверхности Земли под-
NRLMSISE-00 [14].
спутниковыми трассами влияют только два орби-
Из рис. 1 следует, что срок активного суще-
тальных параметра — наклонение и высота, осталь-
ствования КА на сверхнизких околоземных орбитах
ные параметры практически не оказывают влия-
очень мал и составляет несколько месяцев в луч-
ния. Поэтому численное моделирование проводи-
шем случае. Таким образом, для функционирования
лось для варьируемых значений высоты и наклоне-
КА на подобных орбитах необходимо использование
ния орбиты спутника. В идеальном случае орбита
систем компенсации сноса и контроля высоты. Осно-
КА должна быть круговой для обеспечения равно-
вываясь на успешном опыте миссии GOCE по под-
мерного покрытия поверхности Земли измерениями
держанию орбиты, следует заключить, что наибо-
вдоль подспутниковой трассы (проекции движения
лее предпочтительным для проведения градиенто-
КА на земную поверхность). Однако на практике
метрических измерений является диапазон высот от
обеспечить и поддерживать идеально круговую ор-
200 до 225 км, который может обеспечить номиналь-
биту технически трудно, поэтому в настоящей ра-
ный срок активного существования проекта 5 лет.
боте для расчетов использовался достаточно малый
Этот фактор был учтен в численном моделирова-
эксцентриситет, равный e = 0.001.
нии.
3.1. Выбор высоты орбиты КА
3.2. Выбор наклонения орбиты КА
Выбор оптимальной высоты орбиты КА опреде-
Еще одним параметром, ограничивающим вы-
ляется следующими требованиями. С одной сторо-
бор рабочих орбит низкоорбитального КА, являет-
ны, чем меньше высота орбиты КА, тем выше чув-
ся ее наклонение. В миссии GOCE использовалась
ствительность его измерительной аппаратуры к вы-
солнечно-синхронная орбита с наклонением 96.7◦,
сокочастотным гармоникам гравитационного сигна-
диктуемая требованиями по энергетическому обес-
ла. С другой стороны, на сверхнизких околоземных
печению (постоянное освещение солнечных панелей)
598
ЖЭТФ, том 161, вып. 4, 2022
Космический гравитационный градиентометр: . ..
Таблица 1. Расстояние, которое покрывает КА за
КА, которая не покрывала измерениями всех обла-
время между последовательными измерениями
стей поверхности Земли, т.е. не являлась оптималь-
ной с этой точки зрения.
Время между
Полярные орбиты (с наклонением i = 90◦) обес-
1
2
3
4
5
измерениями, с
печивают прохождение КА над всеми широтами по-
верхности Земли, в отличие от неполярных орбит.
Длина дуги, км
7.5
15
23
30
38
Для орбит с i = 90◦ ширина непокрытой облас-
ти вблизи полюса составляет угол |90◦ - i|. Исходя
из этого, требование по 100-процентному покрытию
высота орбиты. Тогда время, требуемое для проведе-
(заполняемости измерениями) поверхности Земли
ния единичного измерения, можно оценить по фор-
для заданного пространственного разрешения ψ мо-
муле
дели ГПЗ диктует следующие условия для накло-
1 λg RE +h
нения, чтобы избежать пропусков вблизи полярных
Δt ≤
(4)
2 Vk RE
областей при восстановлении ГПЗ:
Оценки характерных длин дуг, покрываемых
90◦ - ψ < i < 90◦ + ψ.
КА на поверхности Земли за определенное время,
представлены в табл. 1, из которой следует, что
В данной работе рассматривается возможность
увеличения пространственного разрешения статиче-
для построения карты ГПЗ с угловым разрешени-
ских моделей GOCE не менее чем в 2 раза, что со-
ем ψ ≤ 0.3◦ (длина дуги ≤ 33 км) время между по-
ответствует условию для пространственного разре-
следовательными измерениями должно быть не бо-
шения ψ ≤ 0.3◦. Таким образом, для рабочих орбит
лее 4 с. Ввиду экономии вычислительных ресурсов
космической гравиметрической миссии были иссле-
и двукратного запаса для выполнения сформулиро-
дованы наклонения в диапазоне 89.7◦ ≤ i ≤ 90.3◦.
ванных требований в дальнейших вычислениях вре-
мя Δt было выбрано равным 2 с.
3.3. Выбор шага между последовательными
измерениями
4. ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ
Дополнительным параметром, влияющим на за-
ОРБИТАЛЬНОГО ДВИЖЕНИЯ КА И
полняемость поверхности Земли наблюдениями, яв-
ВЫБОР ОПТИМАЛЬНЫХ ПАРАМЕТРОВ
ляется время между последовательными измерени-
ями (частота опроса измерительной аппаратуры).
Численное моделирование проводилось с помо-
В миссии GOCE данный параметр соответствовал
щью программного комплекса, разработанного в
1 Гц.
ГАИШ МГУ. Программный комплекс позволяет мо-
делировать движение КА на низкой околоземной
Гармоника порядка n разложения ГПЗ задает уг-
ловое разрешение модели ψ = 360◦/2n, что соответ-
орбите в соответствии с рекомендациями IERS2010
ствует длине полуволны геоида
(International Earth Rotation Service) [15]. Модель
ГПЗ в соответствии с выражением (1) рассчиты-
1
πRE
λg =
,
(3)
валась на основе алгоритма Беликова и Тайбато-
2
n
рова [16], воздействие негравитационных эффек-
где RE — средний экваториальный радиус Земли.
тов (давление солнечного излучения) с учетом гео-
Длина полуволны геоида определяет максимальный
метрии КА учитывалось в соответствии с работой
линейный размер сегмента разбиения поверхности
[17]. В качестве прототипа КА был выбран КА
Земли вблизи экваториальной плоскости.
GOCE с массой 1077 кг и размерами 3 м (вдоль
Для угловых разрешений ψ ≤ 0.3◦, соответст-
орбиты)×1.5 м × 1.5 м.
вующих максимальными порядкам гармоник
Моделирование проводилось в предположении,
nmax ≥ 600, длины полуволн геоида должны быть
что на КА установлена система компенсации сноса
λg/2 ≤ 33 км.
и контроля высоты, поэтому влияние сопротивления
Для оценки требуемой периодичности измерений
атмосферы не учитывалось. В табл. 2 представлены
можно воспользоваться круговой орбитальной ско-
параметры моделирования. Важно отметить, что в
ростью Vk космического аппарата и спроецировать
процессе моделирования проводился учет возмуще-
эту линейную скорость на поверхность Земли с по-
ний гармонических коэффициентов ГПЗ до 10 сте-
мощью пропорции (RE + h)/RE , где h — средняя
пени и порядка включительно, так как анализ по-
599
В. К. Милюков, А. И. Филеткин, А. С. Жамков
ЖЭТФ, том 161, вып. 4, 2022
Таблица
2. Начальные орбитальные параметры
ить не только статические, но также ежемесячные
моделирования
и полумесячные модели ГПЗ. Поэтому рассмотрим
их подробнее.
Параметр
Значение
Первая конфигурация соответствует парамет-
рам h = 225 км, i = 89.8◦. Покрытие поверхнос-
Прямое восхождение
90◦
ти Земли подспутниковыми трассами за одни сутки
Эксцентриситет
0.001
изображено на рис. 2.
За одни сутки КА на высоте 225 км совершает
Аргумент перицентра КА
88.5◦
16 целых оборотов (16 нисходящих и 16 восходящих
Средняя аномалия КА
180◦
пересечений экватора), при этом смещение трассы
Варьируемая
вдоль экватора по долготе за один оборот состав-
Высота
ляет 22.4◦. Глобальное распределение измерений по
величина
поверхности Земли для этой конфигурации показа-
Варьируемая
Наклонение
но на рис. 3, а для конфигурации h = 225 км, i =
величина
= 89.9◦ — на рис. 4.
Детальная информация для найденных конфи-
гураций со 100-процентным покрытием подспутни-
крытия Земли подспутниковыми трассами не тре-
ковыми трассами сегментов 0.3◦ × 0.3◦ содержится
бует высокой точности модели движения КА.
в табл. 4.
В исследовании были выбраны следующие диа-
Полученные наборы орбитальных параметров
пазоны варьируемых параметров: высота орбиты от
теоретически позволяют повысить пространствен-
150 до 250 км с шагом 25 км, наклонение от 89.7◦ до
ное разрешение статических моделей ГПЗ более чем
90.3◦ с шагом 0.1◦.
в 2 раза по сравнению с результатамимиссии GOCE.
После моделирования орбит был рассчитан про-
цент глобального покрытия поверхности Земли из-
5. ПЕРСПЕКТИВЫ СОЗДАНИЯ
мерениями для всех конфигураций. Методика рас-
ЕЖЕМЕСЯЧНЫХ МОДЕЛЕЙ ГПЗ ПО
чета глобального процента покрытия (заполняемо-
ГРАДИЕНТОМЕТРИЧЕСКИМ ДАННЫМ
сти) заключалась в следующем: вся поверхность
Земли (360◦ по долготе и 180◦ по широте) разбивает-
Для низкоорбитального спутника произведение
ся на целое количество сегментов размером x◦ × x◦,
пространственного Sspace и временного Stime разре-
которые, в свою очередь, задают угловое (простран-
шения ГПЗ практически равно константе, Sspace ×
ственное) разрешение моделей ГПЗ. Для заданного
× Stime ≈ const, т.е. пространственное разрешение
разрешения (x◦ × x◦) оценивается процент глобаль-
обратно пропорционально временному разрешению
ного покрытия как отношение количества сегмен-
[18]. Следовательно, для одиночного КА повышение
тов k, в которые попала хотя бы одна точка трассы
временного разрешения возможно только за счет
(измерение), к общему числу сегментов K по всей
уменьшения пространственного.
поверхности Земли, т. е. k/K [13]. В табл. 3 пред-
Для поиска конфигураций, которые позволяют
ставлены результаты расчетов.
строить ежемесячные модели ГПЗ, были проана-
Из результатов моделирования следует, что для
лизированы различные пространственные (угловые)
углового разрешения 0.3◦ × 0.3◦ появляются набо-
разрешения от 0.9◦ × 0.9◦ до 1.8◦ × 1.8◦. В миссии
ры орбитальных параметров, для которых полное
GRACE ежемесячные модели ограничивались про-
100-процентное покрытие достигается уже на ин-
странственным разрешением 3.6◦ × 3.6◦, что, как
тервалах интегрирования 140-150 суток. Поэтому
было показано в работе [13], связано, в том чис-
при моделировании с целью уточнения статической
ле, с неоптимальным выбором орбитальных пара-
модели ГПЗ временной интервал был ограничен
метров КА.
160 сутками.
В табл. 5 приведены результаты анализа гло-
Для высоты h = 225 км имеются несколько
бального покрытия подспутниковыми трассами
конфигураций с различными наклонениями орби-
поверхности Земли при угловом разрешении
ты, которые позволяют достичь цели исследования.
0.9◦ × 0.9◦ для рассматриваемых орбитальных кон-
Как будет показано далее, две из них (i = 89.8◦,
фигураций на более коротких интервалах времени.
i = 89.9◦) имеют существенные преимущества по
Всего найдено
4
конфигурации, обеспечивающие
сравнению с остальными, так как позволяют стро-
100-процентное покрытие на временном интервале
600
ЖЭТФ, том 161, вып. 4, 2022
Космический гравитационный градиентометр: . ..
Рис. 2. (В цвете онлайн) Покрытие подспутниковыми трассами (красные линии) поверхности Земли спутником с па-
раметрами h = 225 км, i = 89.8◦ на временном интервале 1 сут (красные и синие треугольные маркеры обозначают
восходящие и нисходящие витки КА)
Рис. 3. (В цвете онлайн) Гистограмма покрытия поверхности Земли измерениями спутником с параметрами h = 225 км,
i = 89.8◦ в сегментах 0.3◦ × 0.3◦ на временном интервале 160 сут (величина глобального покрытия 100%). Цветовая
шкала показывает количество измерений от 0 до 15, приходящихся на соответствующий сегмент земной поверхности
601
10
ЖЭТФ, вып. 4
В. К. Милюков, А. И. Филеткин, А. С. Жамков
ЖЭТФ, том 161, вып. 4, 2022
Таблица 3. Процент глобального покрытия подспутниковыми трассами КА при угловом разрешении ГПЗ 0.3◦ ×0.3◦
в зависимости от наклонения и высоты. Орбитальные параметры, обеспечивающие 100-процентное покрытие, вы-
делены жирным шрифтом. В скобках указано количество дней, за которое достигается максимальное покрытие
Наклонение
Высота, км
150
175
200
225
250
90.3◦
99.6 %(143)
99.4 %(160)
99.6 %(152)
91.8 %(160)
99.6 %(142)
90.2◦
65.1 %(160)
99.3 %(160)
100 %(145)
99.8 %(160)
100 %(154)
90.1◦
100 %(132)
75.4 %(160)
75.2 %(160)
100 %(142)
100 %(135)
90◦
100 %(137)
100 %(147)
52.9 %(160)
100 %(141)
100 %(152)
89.9◦
99.8 %(160)
100 %(142)
99.8 %(160)
100 %(147)
99.8 %(160)
89.8◦
87.4 %(160)
85.4 %(160)
100 %(145)
100 %(160)
99.9 %(151)
89.7◦
99.9 %(160)
94.0 %(160)
99.9 %(160)
94.4 %(160)
99.3 %(160)
Рис. 4. (В цвете онлайн) Гистограмма покрытия поверхности Земли подспутниковыми трассами КА на орбите с пара-
метрами h = 225 км, i = 89.9◦ в сегментах 0.3◦ × 0.3◦ на временном интервале 147 сут (величина глобального покрытия
100 %)
порядка месяца, в число которых входят 2 кон-
месячном интервале показаны на рис. 5.
фигурации на высоте h = 225 км с наклонениями
Детальная информация для найденных конфи-
i = 89.8◦ и i = 89.9◦, найденные в предыдущем
гураций со 100-процентным покрытием подспутни-
разделе. Глобальное распределение измерений по
ковыми трассами сегментов 0.9◦ × 0.9◦ на месячном
поверхности Земли для этих конфигураций на
интервале наблюдения содержится в табл. 6.
602
ЖЭТФ, том 161, вып. 4, 2022
Космический гравитационный градиентометр: . ..
Таблица 4. Параметры орбитальных конфигураций для сегментов 0.3◦ × 0.3◦
Параметры
Конфигурация 1
Конфигурация 2
Высота орбиты
225 км
225 км
Наклонение орбиты
89.8◦
89.9◦
Временной интервал покрытия 100 %
160 сут
147 сут
Количество оборотов на интервале измерений
2579.0
2369.5
Количество измерений
6912000
6350400
Количество измерений на сегмент
минимальное
1 (в 12 сегм.)
1 (в 5 сегм.)
максимальное
23 (в 1 сегм.)
22 (в 2 сегм.)
среднее
10 (в 119515 сегм.)
9 (в 112853 сегм.)
Таблица 5. Процент глобального покрытия подспутниковыми трассами КА при угловом разрешении ГПЗ 0.9◦ ×0.9◦
в зависимости от наклонения и высоты. В скобках указано количество дней, за которое достигается максимальное
покрытие. Жирным шрифтом выделены конфигурации, которые обеспечивают 100-процентное покрытие на вре-
менных интервалах не более одного месяца и совпадают с конфигурациями, найденными в предыдущем разделе
(см. табл. 3)
Наклонение
Высота, км
150
175
200
225
250
90.3◦
100 %(48)
100 %(26)
100 %(77)
100 %(142)
100 %(73)
90.2◦
99 %(160)
100 %(27)
100 %(118)
100 %(92)
100 %(69)
90.1◦
100 %(37)
100 %(27)
89 %(160)
100 %(51)
100 %(66)
90◦
100 %(37)
100 %(31)
73 %(160)
100 %(40)
100 %(63)
89.9◦
100 %(37)
100 %(31)
100 %(137)
100 %(27)
100 %(55)
89.8◦
100 %(109)
100 %(34)
100 %(83)
100 %(28)
100 %(51)
89.7◦
100 %(42)
100 %(38)
100 %(60)
100 %(39)
100 %(47)
Представленные результаты показывают, что
ковыми трассами сегментов 1.8◦ × 1.8◦ содержится
данные конфигурации удовлетворяют условиям
в табл. 8.
построения ежемесячных моделей ГПЗ.
Таким образом, показано, что существуют толь-
Дальнейшее улучшение временного разрешения,
ко две конфигурации (h
= 225 км, i
= 89.8◦;
как упоминалось ранее [18], возможно только за счет
h
= 225 км, i
= 89.9◦), одновременно удовлет-
понижения пространственного. Для поиска конфи-
воряющие требованиям 100-процентного покрытия
гураций, которые позволяют строить модели ГПЗ
на сегментах 0.3◦ × 0.3◦ на временном интервале
с временным разрешением порядка 15 дней, было
160 сут («статическая модель» ГПЗ), на сегментах
проанализировано покрытие поверхности Земли из-
0.9◦×0.9◦ на месячном интервале («ежемесячная мо-
мерениями на сегментах 1.8◦ ×1.8◦. Результаты ана-
дель» ГРЗ) и на сегментах 1.8◦ × 1.8◦ на временном
лиза представлены в табл. 7.
интервале 15 сут («двухнедельная модель» ГПЗ), а
Детальная информация для найденных конфи-
также технологическим требованиям в части воз-
гураций со 100-процентным покрытием подспутни- можности нахождения КА на орбите с заданной вы-
603
10*
В. К. Милюков, А. И. Филеткин, А. С. Жамков
ЖЭТФ, том 161, вып. 4, 2022
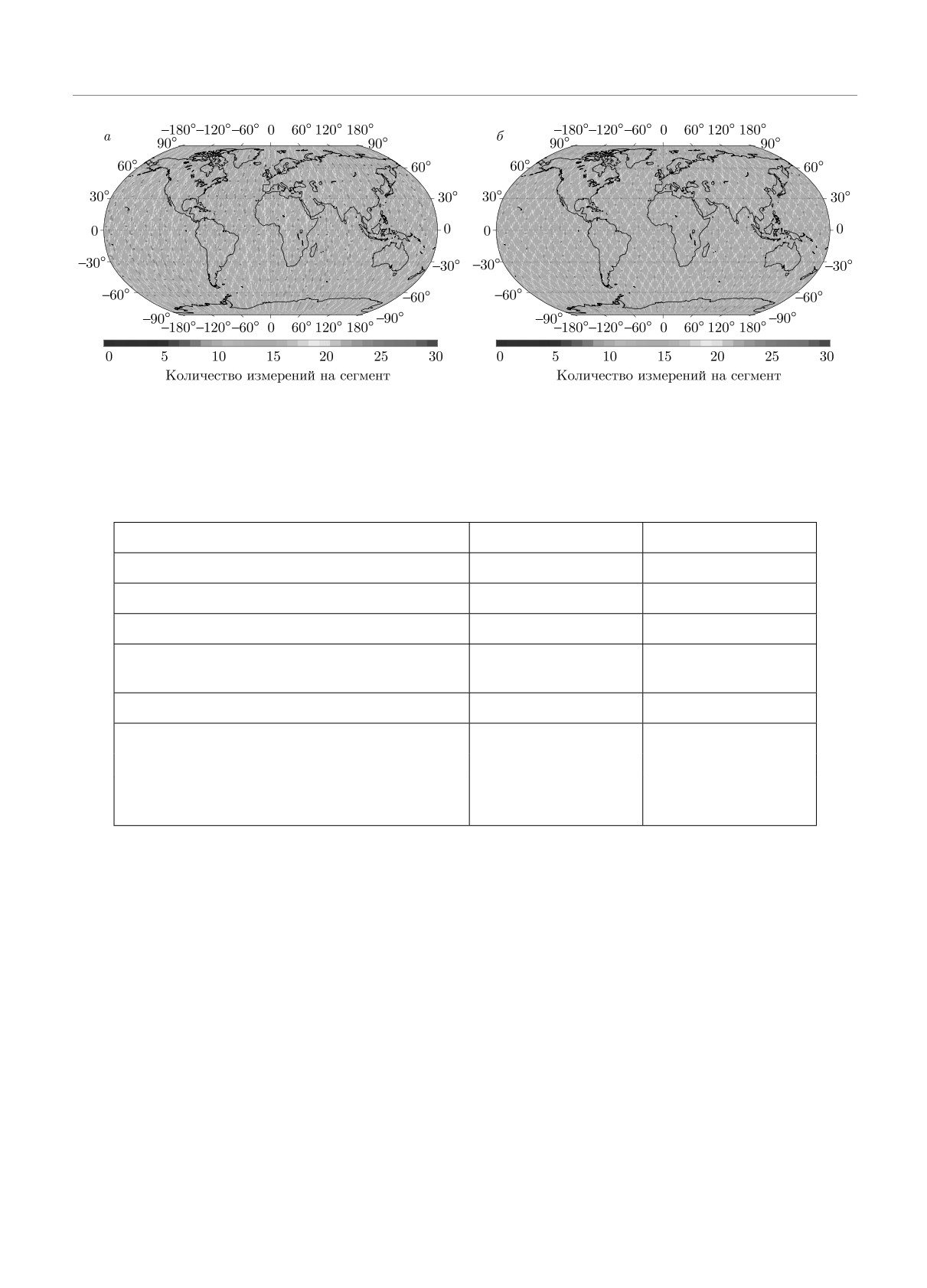
Рис. 5. (В цвете онлайн) Гистограмма покрытия поверхности Земли измерениями спутником с орбитальными парамет-
рами h = 225 км, i = 89.8◦ (а), 89.9◦ (б) в сегментах 0.9◦ × 0.9◦ на временном интервале 1 мес (величина глобального
покрытия 100 %)
Таблица 6. Параметры орбитальных конфигураций для сегментов 0.9◦ × 0.9◦
Параметры
Конфигурация 1
Конфигурация 2
Высота орбиты
225 км
225 км
Наклонение орбиты
89.8◦
89.9◦
Временной интервал покрытия 100 %
28 сут
27 сут
Количество оборотов на интервале
439.2
435.2
измерений
Количество измерений
1209600
1166400
Количество измерений на сегмент
минимальное
1 (в 2 сегм.)
1 (в 1 сегм.)
максимальное
28 (в 160 сегм.)
28 (в 1322 сегм.)
среднее
10 (в 2187 сегм.)
15 (в 2013 сегм.)
сотой (опыт КА GOCE). Технологические требова-
регистрации бортовым градиентометром (акселе-
ния в части чувствительности измерительного обо-
рометром) ускорений, обусловленных воздействием
рудования к гармоникам ГПЗ на борту градиенто-
предельно разрешаемой гармоники гравитацион-
метрического КА рассмотрены в следующем разде-
ного поля Земли, и компенсацией воздействия
ле.
атмосферы на орбитальное движение КА.
Оценим технологические требования, которые
вытекают из выбранной орбитальной конфигурации
6. ТЕХНОЛОГИЧЕСКИЕ ТРЕБОВАНИЯ К
с высотой орбиты КА h = 225 км и необходимости
ИЗМЕРИТЕЛЬНОМУ ОБОРУДОВАНИЮ
восстановления гравитационного поля с разрешени-
ПЕРСПЕКТИВНОЙ
ГРАДИЕНТОМЕТРИЧЕСКОЙ МИССИИ
ем 0.3◦ × 0.3◦, соответствующего гармонике ГПЗ
степени/порядка n = 600. Вклад гармоники сте-
Успешная реализация градиентометрической
пени/порядка n в суммарное гравитационное поле
миссии, с точки зрения используемых технологий,
на орбите рассчитывался по разности гравитацион-
обеспечивается в первую очередь возможностью
ных ускорений, содержащих n и n - 1 гармоник, т. е.
604
ЖЭТФ, том 161, вып. 4, 2022
Космический гравитационный градиентометр: . ..
Таблица 7. Процент глобального покрытия поверхности Земли подспутниковыми трассами КА при угловом раз-
решении ГПЗ 1.8◦ × 1.8◦ в зависимости от наклонения и высоты. В скобках указано количество дней, за которое
достигается максимальное покрытие. Жирным шрифтом выделены конфигурации, которые обеспечивают 100-про-
центное покрытие на временных интервалах не более 15 дней и совпадают с конфигурациями, выделенными ранее
(см. табл. 3 и 5)
Наклонение
Высота, км
150
175
200
225
250
90.3◦
100 %(17)
100 %(22)
100 %(52)
100 %(13)
100 %(69)
90.2◦
100 %(17)
100 %(23)
100 %(80)
100 %(13)
100 %(66)
90.1◦
100 %(17)
100 %(23)
99 %(160)
100 %(13)
100 %(63)
90◦
100 %(17)
100 %(26)
93 %(160)
100 %(14)
100 %(60)
89.9◦
100 %(19)
100 %(27)
100 %(87)
100 %(13)
100 %(53)
89.8◦
100 %(20)
100 %(27)
100 %(53)
100 %(12)
100 %(48)
89.7◦
100 %(20)
100 %(30)
100 %(42)
100 %(12)
100 %(44)
Таблица 8. Параметры орбитальных конфигураций для сегментов 1.8◦ × 1.8◦
Параметры
Конфигурация 1
Конфигурация 2
Высота орбиты
225 км
225 км
Наклонение орбиты
89.8◦
89.9◦
Временной интервал покрытия 100 %
12 сут
13 сут
Количество оборотов на интервале измерений
193.4
209.5
Количество измерений
518400
561600
Количество измерений на сегмент
минимальное
13 (в 1989 сегм.)
13 (в 436 сегм.)
максимальное
55 (в 1 сегм.)
56 (в 1 сегм.)
среднее
26 (в 4137 сегм.)
28 (в 2578 сегм.)
Δgn = gn -gn-1. Оценка величины вклада гармоник
ми данными), а для измерения 600-й гармоники —
различных степеней/порядков была проведена для
не хуже 10-15-10-14 м/с2.
различных высот орбит КА в узловых точках над
Для орбиты с высотой 225 км и степеней гар-
поверхностью Земли, разнесенных на 5◦ по долготе
моник 300 и 600 рассчитаны гистограммы распре-
и широте.
деления величины ускорения над различными обла-
На рис.
6
представлены величины абсолют-
стями поверхности Земли (рис. 7а). Значения грави-
ных ускорений, обусловленных гармониками ГПЗ
тационных ускорений, создаваемых 300-й гармони-
на различных высотах над поверхностью Земли и
кой, варьируются в диапазоне 10-11-5 · 10-10 м/с2
усредненных по всем рассчитанным узловым точ-
(рис. 7а), что соответствует современному техноло-
кам. Как следует из рис. 6, на высоте 225 км (высота
гическому уровню бортовых акселерометров, про-
орбиты КА миссии GOCE) для измерения 300-й гар-
шедших летную квалификацию в реальных кос-
моники требуется чувствительность прибора в сред-
мических миссиях. Акселерометры SUPERSTAR
нем не хуже 10-10 м/с2 (что согласуется с реальны-
французской фирмы ONERA, которые входили в
605
В. К. Милюков, А. И. Филеткин, А. С. Жамков
ЖЭТФ, том 161, вып. 4, 2022
характера в виде солнечного излучения, поскольку
КА будет периодически входить и выходить из тени
Земли. Как показывают расчеты, за один оборот КА
вокруг Земли будут два таких воздействия с мак-
симальной по амплитуде величиной 2 · 10-8 м/с2.
Таким образом, помимо высокой чувствительности
используемая система компенсации негравитацион-
ных ускорений должна обладать достаточно широ-
ким динамическим диапазоном не хуже 10-8 м/с2,
что должно выполняться автоматически, поскольку
эта же система должна компенсировать воздействие
атмосферы, которое, как минимум, на два поряд-
Рис. 6. Величины абсолютных ускорений, создаваемых
гармониками ГПЗ на различных высотах над поверхнос-
ка больше. Отсюда следует, что факт периодическо-
тью Земли (указаны около прямых)
го вхождения КА в тень Земли при должной рабо-
те системы компенсации негравитационных ускоре-
ний не повлияет на результаты измерений парамет-
состав измерительной гравитационной аппаратуры
ров ГПЗ.
миссии GOCE, обладали чувствительностью при-
мерно 2 · 10-12 м/с2 [11,19]. Аналогичной аппарату-
рой оснащены два спутника-близнеца космической
7. ОБСУЖДЕНИЕ РЕЗУЛЬТАТОВ
миссии Grace Follow On, успешно работающей в на-
стоящее время на орбите [12]. В рамках подготов-
Поскольку настоящее исследование базируется
ки космического гравитационно-волнового проекта
на результатах проекта GOCE и имеет своей целью
TianQin в Китае был испытан бортовой акселеро-
улучшить в перспективе модель ГПЗ, построенную
метр, чувствительность которого на орбите достиг-
по результатам миссии GOCE, путем оптимизации
ла уровня 5 · 10-11 м/с2 [20].
орбитальных параметров КА, целесообразно срав-
Значения гравитационных ускорений, создавае-
нить полученные результаты с орбитальной конфи-
мых 600-й гармоникой на высоте h = 225 км, ва-
гурацией миссии GOCE.
рьируются в диапазоне 10-15-10-14 м/с2 (рис. 7б),
Дополнительно к проведенным вычислениям бы-
что задает высокие требования к чувствительно-
ли выполнены расчеты орбиты КА GOCE с пара-
сти измерительной аппаратуры будущих космиче-
метрами h = 224 км и i = 96.7◦.
ских гравиметрических миссий. Отметим, что ак-
селерометры аналогичной чувствительности долж-
Гистограмма распределения измерений на рис. 8
ны входить в состав измерительной аппаратуры бу-
наглядно демонстрирует не покрытые измерения-
дущих гравитационно-волновых миссий LISA [21]
ми области вблизи полюсов. Максимальный гло-
и TianQin [22]. Орбитальный эксперимент LISA
бальный процент покрытия для данной конфигу-
Pathfinder, осуществленный в 2016 г., продемонстри-
рации, соответствующий примерно 93 %, достигает-
ровал выдающийся результат: была достигнута чув-
ся за 111 дней при пространственном разрешении
ствительность к измерению спектральной плотно-
0.64◦ × 0.64◦ и при дальнейшем увеличении време-
сти остаточных ускорений пробных масс на уровне
ни наблюдения сохраняет это значение. Параметры
10-16 м · с-2 · Гц-1/2 на частоте 0.1 мГц [23]. Од-
конфигурации GOCE представлены в табл. 9.
нако при этом следует заметить, что эксперимент
Как было отмечено в разд. 2, неполное покрытие
LISA Pathfinder проводился в достаточно «чистых»
измерениями поверхности Земли приводит к тому,
гравитационных условиях в точке Лагранжа L1 сис-
что восстановление гравитационного поля по про-
темы Солнце-Земля, в то время как на орбите Зем-
веденным измерениям является некорректной зада-
ли такой чистоты достичь достаточно сложно из-за
чей, поэтому для ее решения вводятся по опреде-
наличия большого количества возмущающих фак-
ленному правилу псевдонаблюдения. Однако дан-
торов, в том числе негравитационной природы.
ный факт вносит систематическую ошибку, что ска-
Необходимо также отметить, что на предложен-
зывается на точности определения коэффициентов
ных в данной работе орбитах, в отличие от термина-
высоких порядков. Таким образом, 100-процентное
торной солнечно-синхронной, на КА будут иметь ме-
покрытие измерениями поверхности Земли является
сто скачкообразные воздействия негравитационного
принципиальным условием для адекватного восста-
606
ЖЭТФ, том 161, вып. 4, 2022
Космический гравитационный градиентометр: . ..
Рис. 7. (В цвете онлайн) Пространственное распределение величины ускорения, создаваемого гармоникой ГПЗ степени
n = 300 (а), 600 (б) на высоте 225 км
Рис. 8. (В цвете онлайн) Гистограмма покрытия поверхности Земли измерениями спутником с параметрами h = 224 км,
i = 96.7◦ в сегментах 0.64◦ × 0.64◦ на временном интервале 111 сут. Величина глобального покрытия 93.1%
новления ГПЗ во всем объеме разрешаемых гармо-
ственных и временных разрешений для наиболее
нических коэффициентов.
оптимальных конфигураций в сравнении с миссией
В табл. 10 приведены результаты выполненного
GOCE (нижняя строка таблицы).
анализа — рассчитанные значения параметров ор-
Проведенные исследования показали, что суще-
бит и статистика по глобальному покрытию поверх-
ствуют конфигурации сверхнизких орбит для гра-
ности Земли измерениями для разных простран-
диентометрических миссий типа GOCE с парамет-
607
В. К. Милюков, А. И. Филеткин, А. С. Жамков
ЖЭТФ, том 161, вып. 4, 2022
Таблица 9. Параметры конфигурации GOCE в сегментах 0.64◦ × 0.64◦
Параметры
Конфигурация GOCE
Высота орбиты
224 км
Наклонение орбиты
96.7◦
Временной интервал покрытия 100 %
111 сут
Количество оборотов на интервале измерений
1789.8
Количество измерений
4795200
Количество измерений на сегмент
минимальное
0 (в 11520 сегм.)
максимальное
97 (в 4 сегм.)
среднее
29 (в 5333 сегм.)
Таблица 10. Сводная таблица результатов моделирования
Высота
Наклонение
Период
Угловое
Покрытие,
орбиты, км
орбиты
измерений, сут
разрешение
%
225
89.8◦
160
0.3◦ × 0.3◦
100
225
89.8◦
28
0.9◦ × 0.9◦
100
225
89.8◦
12
1.8◦ × 1.8◦
100
225
89.9◦
147
0.3◦ × 0.3◦
100
225
89.9◦
27
0.9◦ × 0.9◦
100
225
89.9◦
13
1.8◦ × 1.8◦
100
224
96.7◦
111
0.64◦ × 0.64◦
93.1
рами h = 225 км, i = 89.8◦ и h = 225 км, i =
8. ЗАКЛЮЧЕНИЕ
= 89.9◦, которые обеспечивают 100-процентную за-
полняемость поверхности Земли измерениями на
Важным фактором, который необходимо учиты-
всех рассмотренных временных интервалах и про-
вать при планировании будущих гравиметрических
странственных (угловых) разрешениях. Это позво-
миссий, является плотность покрытия измерения-
ляет улучшить имеющиеся на текущий момент мо-
ми поверхности Земли. Неполное покрытие приво-
дели ГПЗ и получить следующие модели:
дит к тому, что построение модели ГПЗ по полу-
ченным данным становится некорректной задачей.
1) с угловым разрешением 0.3◦ × 0.3◦ (простран-
В рамках настоящей работы выполнено исследова-
ственное разрешение 33 км) на интервале 160 дней
ние орбитальных и инструментальных параметров
и более;
перспективной градиентометрической миссии и по-
лучены орбитальные параметры КА, которые поз-
2) с угловым разрешением 0.9◦ × 0.9◦ (простран-
волят существенно улучшить пространственное раз-
ственное разрешение 100 км) на интервале 28 дней;
решение статической модели ГПЗ, имеющейся в на-
стоящее время по результатам измерений проекта
3) с угловым разрешением 1.8◦ × 1.8◦ (простран-
GOCE, за счет глобального покрытия поверхности
ственное разрешение 200 км) на интервале 14 дней.
Земли измерениями.
608
ЖЭТФ, том 161, вып. 4, 2022
Космический гравитационный градиентометр: . ..
Использование орбит с найденными парамет-
7.
J. M. Brockmann, N. Zehentner, E. Höck et al.,
рами в перспективных градиентометрических мис-
Geophys. Res. Lett. 41, 8089 (2014).
сиях позволит более чем в 2 раза повысить сте-
8.
B. Hofmann-Wellenhor and H. Moritz, Physical
пень сферических гармоник статической модели
Geodesy, Springer, Newfoundland (2005).
ГПЗ (n
= 600 против n
= 280 для модели
EGM_TIM_RL05, построенной по данным GOCE).
9.
M. van Gelderen and R. Koop, J. Geod. 71, 337
Оптимизация орбитальных параметров позволит
(1997).
впервые по данным градиентометрической миссии
10.
W. M. Kaula, Theory of Satellite Geodesy: Applica-
строить ежемесячные модели ГПЗ, пространствен-
tions of Satellites to Geodesy, Dover Publ., Michigan
ное разрешение которых в 4 раза превосходят су-
(2000), p. 160.
ществующие ежемесячные модели, построенные по
данным миссии GRACE (100 км против 400 км).
11.
B. D. Tapley, S. Bettadpur, M. M. Watkins et al.,
В рамках настоящего исследования также пока-
Geophys. Res. Lett. 31(9), 4 (2004).
зано, что требование высокого разрешения моделей
12.
K. Abich, A. Abramovici, B. Amparan et al., Phys.
ГПЗ задает высокие требования к чувствительно-
Rev. Lett. 123, 031101 (2019).
сти измерительной аппаратуры будущих космиче-
ских гравиметрических миссий. Так, построение мо-
13.
В. К. Милюков, А. И. Филеткин, А. С. Жамков,
дели ГПЗ в разложении до гармоник 600-го порядка
Астрон. ж. 98, 342 (2021).
требует измерение гравитационных ускорений с точ-
14.
J. M. Picone, A. E. Hedin, D. P. Drob et al.,
ностью до 10-15-10-14 м/с2, акселерометрическая
J. Geophys. Res.: Space Phys. 107, A12 (2002).
аппаратура такого уровня точности уже разрабаты-
вается в ряде мировых научных центров.
15.
G. Petit and B. Luzum, in IERS Technical Note
Полученные в рамках настоящего исследования
No. 36, Frankfurt am Main, Verlag des Bundesamts
результаты могут быть применены при разработке
fur Kartographie und Geodasie (2010), p. 179.
концепции перспективного градиентометрического
16.
М. В. Беликов, К. А. Тайбаторов, Кинематика и
проекта на низкой околоземной орбите.
физика небесных тел 6, 24 (1990).
Финансирование. Работа выполнена в рамках
17.
O. Montenbruck and E. Gill, Satellite Orbits. Models,
научно-образовательной школы МГУ «Фундамен-
Methods and Applications, Springer-Verlag, New
тальные и прикладные исследования космоса» и при
York (2000).
финансовой поддержке Российского фонда фунда-
18.
V. K. Milyukov and Hsien-Chi Yeh, Astron. Rep. 62,
ментальных исследований (грант № 19-29-11008).
1003 (2018).
19.
P. Touboul, E. Willemenot, B. Foulon et al., Boll.
ЛИТЕРАТУРА
Geof. Teor. Appl. 40, 321 (1999).
1. R. Pail, S. Bruinsma, F. Migliaccio et al., J. Geod.
20.
Jun Luo, Yan-Zheng Bai, Lin Cai et al., Class.
85, 819 (2011).
Quantum Grav. 37, 185013 (2020).
2. J. Schall, A. Eicker, and J. Kusche, J. Geod. 88, 403
21.
P. Bender, A. Brillet, I. Ciufolini et al., LISA (Laser
(2014).
Interferometer Space Antenna): an International
3. W. Yi, Space Res. 50, 371 (2012).
Project in the Field of Fundamental Physics, Space
Pre-Phase A Report, Max-Planck-Institut fur Quan-
4. W. Yi, R. Rummel, and T. Gruber, Stud. Geophys.
tenoptic, Garching, Germany (1998).
Geod. 57, 174 (2013).
22.
J. Luo, L.-Sh. Chen, H.-Z. Duan et al., Class.
5. R. Pail and G. Plank, J. Geod. 76, 462 (2002).
Quantum Grav. 33, 035010 (2016).
6. R. Pail, B. Metzler, B. Lackner et al., in Proceedings
of the 3rd International GOCE User Workshop, Fras-
23.
M. Armano, H. Audley, G. Auger et al., Phys. Rev.
cati, ESRIN, Italy (2006), p. 249.
Lett. 116, 231101 (2016).
609